
 ROS2演習7-2021:Turtlebot3をプログラムで動かそう (2021-5-23) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。今回は、ROS2演習4-2021の知識を使いTurtlebot3をPythonプ […]
ROS2演習7-2021:Turtlebot3をプログラムで動かそう (2021-5-23) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。今回は、ROS2演習4-2021の知識を使いTurtlebot3をPythonプ […]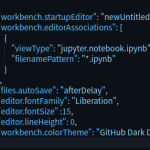 VSCodeの設定 (2021-5-21) - Visual Stdudio CodeをUbuntu20.04にインストール・設定したので備忘録 インストール Visual Studio Code ここからdebパッケージをダウンロードする。ダウンロードしたファイル名 […]
VSCodeの設定 (2021-5-21) - Visual Stdudio CodeをUbuntu20.04にインストール・設定したので備忘録 インストール Visual Studio Code ここからdebパッケージをダウンロードする。ダウンロードしたファイル名 […] Ubuntu20.04:インストールと設定 (ASUS TUF DASH F15) (2021-5-14) - Ubuntu20.04をASUS TUF DASH F15にインストールと設定したのでその備忘録。ここでは、増設したSSD(Samsung 970 EVO Plus 2TB)にインストールした。VOYAGER GE 2 […]
Ubuntu20.04:インストールと設定 (ASUS TUF DASH F15) (2021-5-14) - Ubuntu20.04をASUS TUF DASH F15にインストールと設定したのでその備忘録。ここでは、増設したSSD(Samsung 970 EVO Plus 2TB)にインストールした。VOYAGER GE 2 […] ASUS TUF DASH F15に変えてみた (2021-5-13) - メインノートPCをRAZER Blade 15 (2018)からASUS TUF DASH F15に変えた。ソフトウェア設定などの備忘録。 背 景 メインで使用していたRAZER Blade 15のバッテリーが膨れて筐体 […]
ASUS TUF DASH F15に変えてみた (2021-5-13) - メインノートPCをRAZER Blade 15 (2018)からASUS TUF DASH F15に変えた。ソフトウェア設定などの備忘録。 背 景 メインで使用していたRAZER Blade 15のバッテリーが膨れて筐体 […] ROS2演習6-2021:簡単なサービス通信しよう!(Python) (2021-5-10) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。今回は、ROS2のもう一つの通信方式であるサービスとそれをPythonで実現する […]
ROS2演習6-2021:簡単なサービス通信しよう!(Python) (2021-5-10) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。今回は、ROS2のもう一つの通信方式であるサービスとそれをPythonで実現する […]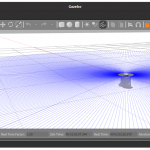 ROS2演習5-2021:トピック通信しよう!(Python) (2021-5-6) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。今回は、ROS2の通信方式であるトピックとそれをPythonで実現する方法を学び […]
ROS2演習5-2021:トピック通信しよう!(Python) (2021-5-6) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。今回は、ROS2の通信方式であるトピックとそれをPythonで実現する方法を学び […]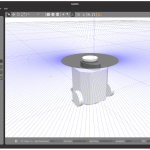 ROS2演習4-2021:シミュレータでTurtlebot3を動かそう! (2021-5-6) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。今回は、シミュレータGAZEBOを使い、Turtlebot3を動かします。次のT […]
ROS2演習4-2021:シミュレータでTurtlebot3を動かそう! (2021-5-6) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。今回は、シミュレータGAZEBOを使い、Turtlebot3を動かします。次のT […]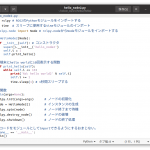 ROS2演習3-2021:はじめてのROS2プログラミング (Python) (2021-5-5) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。演習3では次のコンテンツを学びます。 コンテンツ ワークスペース パッケージ 参 […]
ROS2演習3-2021:はじめてのROS2プログラミング (Python) (2021-5-5) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。演習3では次のコンテンツを学びます。 コンテンツ ワークスペース パッケージ 参 […] ROS2演習2-2021:亀で遊ぼう! (2021-5-2) - この記事は私が金沢工業大学ロボティクス学科で2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。第1回でROS2をインストール、設定、動作を確認しました。第2回は、ROSの定番であるタート […]
ROS2演習2-2021:亀で遊ぼう! (2021-5-2) - この記事は私が金沢工業大学ロボティクス学科で2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。第1回でROS2をインストール、設定、動作を確認しました。第2回は、ROSの定番であるタート […] ROS2演習1-2021:ROS2 Foxyのインストールと設定 (2021-5-2) - この記事は私が金沢工業大学ロボティクス学科で2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。まずは、ROS2 Foxyをインストールして設定しましょう!作業 […]
ROS2演習1-2021:ROS2 Foxyのインストールと設定 (2021-5-2) - この記事は私が金沢工業大学ロボティクス学科で2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。まずは、ROS2 Foxyをインストールして設定しましょう!作業 […] ROS2: Webotsシミュレータでルンバを動かそう! (2021-4-28) - ROS2でWebotsシミュレータでiRobot社のCreate2を動かしましょう!本記事ではカナダのSimon Fraser University, Autonomy Lab.のJacob Perronさんのフォークし […]
ROS2: Webotsシミュレータでルンバを動かそう! (2021-4-28) - ROS2でWebotsシミュレータでiRobot社のCreate2を動かしましょう!本記事ではカナダのSimon Fraser University, Autonomy Lab.のJacob Perronさんのフォークし […] Byobu:端末分割表示アプリ (2021-4-28) - Tmuxのキー操作を少し複雑なのでより簡単なByobuのインストールと使い方メモ。 公式サイト Byobu 公式Youtube:Learn Byobu while listening to Mozart インストール $ […]
Byobu:端末分割表示アプリ (2021-4-28) - Tmuxのキー操作を少し複雑なのでより簡単なByobuのインストールと使い方メモ。 公式サイト Byobu 公式Youtube:Learn Byobu while listening to Mozart インストール $ […] ROS2: Webotsのインストール (2021-4-25) - WebotsをインストールしてROS2で使うためのメモ。Webotsはオープンソースの3次元ロボットシミュレータ。1996年にスイス連邦工科大学ローザンヌ校(EPFL)のOliver Michel博士が開発したものが元に […] ROS2: Foxyのインストールと設定 (2021-4-23) - ROS2 Foxyのインストールメモ。作業時間はネットワーク環境によりますが、30分ほどで終わると思います。 環 境 Ubuntu 20.04 (64bit x86) 本ページではIntelまたはAMDのCPU用のUb […]
ROS2: Webotsのインストール (2021-4-25) - WebotsをインストールしてROS2で使うためのメモ。Webotsはオープンソースの3次元ロボットシミュレータ。1996年にスイス連邦工科大学ローザンヌ校(EPFL)のOliver Michel博士が開発したものが元に […] ROS2: Foxyのインストールと設定 (2021-4-23) - ROS2 Foxyのインストールメモ。作業時間はネットワーク環境によりますが、30分ほどで終わると思います。 環 境 Ubuntu 20.04 (64bit x86) 本ページではIntelまたはAMDのCPU用のUb […] Ubuntu20.04:USB Linuxの作り方 (2021-4-22) - USBメモリにUbuntu20.04をインストールする方法を紹介します。これをUSB Linuxとよぶことにします。この方法では、Windowsのハードデスクを消費しません。Linuxシステムと今後開発していくソフトウェ […]
Ubuntu20.04:USB Linuxの作り方 (2021-4-22) - USBメモリにUbuntu20.04をインストールする方法を紹介します。これをUSB Linuxとよぶことにします。この方法では、Windowsのハードデスクを消費しません。Linuxシステムと今後開発していくソフトウェ […] ロボット知能工学特論:第2週 確率・統計の基礎 (2021-4-17) - このページは金沢工業大学大学院機械工学専攻ロボット知能工学特論のサポートページです。第2週は教科書を使っていく上でのソフトウェアのインストールとその使い方のハンズオンとなります。 教科書 詳細 確率ロボティクス -Pyt […]
ロボット知能工学特論:第2週 確率・統計の基礎 (2021-4-17) - このページは金沢工業大学大学院機械工学専攻ロボット知能工学特論のサポートページです。第2週は教科書を使っていく上でのソフトウェアのインストールとその使い方のハンズオンとなります。 教科書 詳細 確率ロボティクス -Pyt […] HARD2021:講師のお仕事 (2021-4-8) - HARD2021ワークショップが終了してロス状態です。忘備録として講師として実施したことを残します。 講習会1週間前まで Zoomを登録制にしたので、参加者希望者にZoomの登録メールを送る。 アンケート(Googleフ […]
HARD2021:講師のお仕事 (2021-4-8) - HARD2021ワークショップが終了してロス状態です。忘備録として講師として実施したことを残します。 講習会1週間前まで Zoomを登録制にしたので、参加者希望者にZoomの登録メールを送る。 アンケート(Googleフ […] HARD2021: リアルRoombaをノートPCで動かそう!(第2回補講) (2021-4-4) - HARD2021は終わりましたが、ワークショップでは触れることのできなかったこと紹介します。つまり、補講ですね。本記事ではノートPCで本物のルンバを動かす方法を紹介します。ここでは、create_autonomyパッケー […]
HARD2021: リアルRoombaをノートPCで動かそう!(第2回補講) (2021-4-4) - HARD2021は終わりましたが、ワークショップでは触れることのできなかったこと紹介します。つまり、補講ですね。本記事ではノートPCで本物のルンバを動かす方法を紹介します。ここでは、create_autonomyパッケー […] HARD2021:とってもリーズナブルなLIDAR。RPLIDAR A1M8を使おう!(第2回補講) (2021-4-4) - HARD2021は終わりましたが、ワークショップでは触れることのできなかったこと紹介します。本記事ではワークショップで紹介した1万円ぐらいで購入できるとっても安価なLIDAR、SLAMTEC社のRPLIDAR A1M8の […]
HARD2021:とってもリーズナブルなLIDAR。RPLIDAR A1M8を使おう!(第2回補講) (2021-4-4) - HARD2021は終わりましたが、ワークショップでは触れることのできなかったこと紹介します。本記事ではワークショップで紹介した1万円ぐらいで購入できるとっても安価なLIDAR、SLAMTEC社のRPLIDAR A1M8の […] 祝!Folding@homeチームKanazawa発足1周年 (2021-4-4) - 祝!1周年記念日。Folding@homeチーム Kanazawaは2020年4月4日に発足しました。 現 状 2021年4月4日現在、メンバー95名、総得点約85.3億、ワークユニット数約12万となり、総得点では世界1 […] HARD2021: Home AI Robot Development スプリングワークショップ 概要 (2021-3-30) - HARD (Home AI Robot Development) スプリングワークショップ2021の概要は次のとおりです。なお、昨年の夏に実施したHARD2020をベースに、問題点であった開発環境のインストールと設定の難 […] HARD2021:AIロボットのつくり方(第1回) (2021-3-30) - HARD2021スプリングワークショップ「第1回AIロボットのつくり方」のサポートページ。HARD2021は日本ロボット学会インテリジェントホームロボティクス研究専門委員会主催の「知能ホームロボティクス入門講習会2021 […] HARD2021:ロボット航法のつくり方(第2回) (2021-3-30) - HARD2021スプリングワークショップ「第2回ロボット航法のつくり方」のサポートページです。第2回では、カーナビならぬロボットナビゲーション(航法)の作り方を学んでいきます。 なお、ワークショップでは時間の都合上、シミ […] HARD2021:ロボット視覚のつくり方(第3回) (2021-3-30) - HARD2021スプリングワークショップ「第3回ロボット視覚のつくり方」に関するページです。今回はロボットのLIDAR(レーザ式測域センサ)やカメラからのデータ取得方法とその処理について学び体験します。ハンズオンではシミ […]
祝!Folding@homeチームKanazawa発足1周年 (2021-4-4) - 祝!1周年記念日。Folding@homeチーム Kanazawaは2020年4月4日に発足しました。 現 状 2021年4月4日現在、メンバー95名、総得点約85.3億、ワークユニット数約12万となり、総得点では世界1 […] HARD2021: Home AI Robot Development スプリングワークショップ 概要 (2021-3-30) - HARD (Home AI Robot Development) スプリングワークショップ2021の概要は次のとおりです。なお、昨年の夏に実施したHARD2020をベースに、問題点であった開発環境のインストールと設定の難 […] HARD2021:AIロボットのつくり方(第1回) (2021-3-30) - HARD2021スプリングワークショップ「第1回AIロボットのつくり方」のサポートページ。HARD2021は日本ロボット学会インテリジェントホームロボティクス研究専門委員会主催の「知能ホームロボティクス入門講習会2021 […] HARD2021:ロボット航法のつくり方(第2回) (2021-3-30) - HARD2021スプリングワークショップ「第2回ロボット航法のつくり方」のサポートページです。第2回では、カーナビならぬロボットナビゲーション(航法)の作り方を学んでいきます。 なお、ワークショップでは時間の都合上、シミ […] HARD2021:ロボット視覚のつくり方(第3回) (2021-3-30) - HARD2021スプリングワークショップ「第3回ロボット視覚のつくり方」に関するページです。今回はロボットのLIDAR(レーザ式測域センサ)やカメラからのデータ取得方法とその処理について学び体験します。ハンズオンではシミ […] HARD2021:ロボット聴覚のつくり方(第4回最終回) (2021-3-30) - HARD2021スプリングワークショップ「ロボット聴覚のつくり方(第4回最終回)」に関するページです。今まで3回実施しました。4回目の最終回はロボットの聴覚の作り方です。音声認識と音声合成について学び体験します。音声認識 […]
HARD2021:ロボット聴覚のつくり方(第4回最終回) (2021-3-30) - HARD2021スプリングワークショップ「ロボット聴覚のつくり方(第4回最終回)」に関するページです。今まで3回実施しました。4回目の最終回はロボットの聴覚の作り方です。音声認識と音声合成について学び体験します。音声認識 […] HARD2021: Gazeboシミュレータでルンバを動かそう! (2021-3-30) - Gazeboシミュレータを使い、ルンバ(Roomba)を動かします。本記事ではカナダのSimon Fraser University, Autonomy Lab.のJacob PerronさんのフォークしたiRobot社 […]
HARD2021: Gazeboシミュレータでルンバを動かそう! (2021-3-30) - Gazeboシミュレータを使い、ルンバ(Roomba)を動かします。本記事ではカナダのSimon Fraser University, Autonomy Lab.のJacob PerronさんのフォークしたiRobot社 […]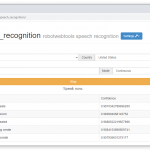 HARD2021:質問応答システムのつくり方 (2021-3-26) - この記事はHARD2021(Home AI Robot Development)ワークショップ用です。 本記事ではROSを使った簡単な質問応答システムを作ってみましょう。言語は英語だけです。日本語には対応していません。な […]
HARD2021:質問応答システムのつくり方 (2021-3-26) - この記事はHARD2021(Home AI Robot Development)ワークショップ用です。 本記事ではROSを使った簡単な質問応答システムを作ってみましょう。言語は英語だけです。日本語には対応していません。な […]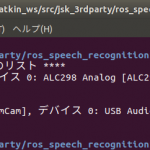 HARD2021: 音声認識ライブラリSpeechRecognitionをROSパッケージ化しよう! (2021-3-26) - この記事はHARD2021(Home AI Robot Development)スプリングワークショップ用です。 SpeechRecognitionというPythonの音声認識ライブラリはご存知でしょうか。CMU Sph […]
HARD2021: 音声認識ライブラリSpeechRecognitionをROSパッケージ化しよう! (2021-3-26) - この記事はHARD2021(Home AI Robot Development)スプリングワークショップ用です。 SpeechRecognitionというPythonの音声認識ライブラリはご存知でしょうか。CMU Sph […]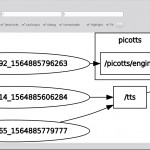 HARD2021:軽量ROSパッケージpicottsを使い音声合成しよう! (2021-3-23) - HARD2021(Home AI Robot Development)スプリングワークショップ用です。今回は、オンライン、オフラインの色々な音声合成エンジンをサポートしているArnaud Rameyさんが開発したROSパ […]
HARD2021:軽量ROSパッケージpicottsを使い音声合成しよう! (2021-3-23) - HARD2021(Home AI Robot Development)スプリングワークショップ用です。今回は、オンライン、オフラインの色々な音声合成エンジンをサポートしているArnaud Rameyさんが開発したROSパ […]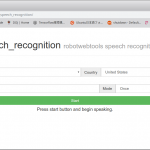 HARD2021: Web Speech APIで音声認識しよう! (2021-3-22) - この記事はHARD2021(Home AI Robot Development)スプリングワークショップ用です。 Web Speech APIをご存知でしょうか。これを使うブラウザで音声認識が簡単にできます。今回は、Yu […]
HARD2021: Web Speech APIで音声認識しよう! (2021-3-22) - この記事はHARD2021(Home AI Robot Development)スプリングワークショップ用です。 Web Speech APIをご存知でしょうか。これを使うブラウザで音声認識が簡単にできます。今回は、Yu […] HARD2021:USB Linuxを長持ちさせよう! (2021-3-21) - USB Linuxは適切なpartitionにしていないと早死にするので、/varや/tmpはramfsにすることを勧められたので、早速設定してみよう。 USBメモリは書込/消去回数が1万から10万回といわれているので、 […]
HARD2021:USB Linuxを長持ちさせよう! (2021-3-21) - USB Linuxは適切なpartitionにしていないと早死にするので、/varや/tmpはramfsにすることを勧められたので、早速設定してみよう。 USBメモリは書込/消去回数が1万から10万回といわれているので、 […]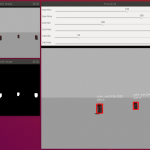 HARD2021:基礎的な物体検出器をPythonで作ろう! (2021-3-19) - この記事はHARD2021(Home AI Robot Development)ワークショップ第3回用です。カメラから取得した画像データをOpenCVを使い画像処理することを学んだので、今回は物体検出のプログラムを作って […]
HARD2021:基礎的な物体検出器をPythonで作ろう! (2021-3-19) - この記事はHARD2021(Home AI Robot Development)ワークショップ第3回用です。カメラから取得した画像データをOpenCVを使い画像処理することを学んだので、今回は物体検出のプログラムを作って […] HARD2021:OpenCVとPythonプログラムで画像処理をしよう! (2021-3-14) - この記事はHARD2021(Home AI Robot Development)ワークショップ用です。今回は、コンピュータビジョンライブラリの定番OpenCVをROSで使うためにcv_bridgeを用いたPythonプロ […]
HARD2021:OpenCVとPythonプログラムで画像処理をしよう! (2021-3-14) - この記事はHARD2021(Home AI Robot Development)ワークショップ用です。今回は、コンピュータビジョンライブラリの定番OpenCVをROSで使うためにcv_bridgeを用いたPythonプロ […] HARD2021:PythonプログラムでLiDARを使おう! (2021-3-14) - この記事はHARD2021(Home AI Robot Development)スプリングワークショップ用です。今回はLiDAR(Light Detection and Ranging)の情報を取得するPythonプログ […]
HARD2021:PythonプログラムでLiDARを使おう! (2021-3-14) - この記事はHARD2021(Home AI Robot Development)スプリングワークショップ用です。今回はLiDAR(Light Detection and Ranging)の情報を取得するPythonプログ […] HARD2021:ルンバをPythonプログラムでナビゲーションさせよう! (2021-3-12) - この記事はHARD2021(Home AI Robot Development)スプリングワークショップ用です。今回はナビゲーション用のPythonプログラムを作りましょう。このナビゲーションはロボットが通過する地点(ウ […]
HARD2021:ルンバをPythonプログラムでナビゲーションさせよう! (2021-3-12) - この記事はHARD2021(Home AI Robot Development)スプリングワークショップ用です。今回はナビゲーション用のPythonプログラムを作りましょう。このナビゲーションはロボットが通過する地点(ウ […] HARD2021: ルンバをPythonプログラムで動かそう! (2021-3-11) - Pythonプログラムでルンバを動かしてみましょう!まず、ソースコードを見てみましょう。今回もたったの39行です。PythonプログラムはC++でコーディングする場合と比較して圧倒的に短くなるので初心者にもとっつきやすい […]
HARD2021: ルンバをPythonプログラムで動かそう! (2021-3-11) - Pythonプログラムでルンバを動かしてみましょう!まず、ソースコードを見てみましょう。今回もたったの39行です。PythonプログラムはC++でコーディングする場合と比較して圧倒的に短くなるので初心者にもとっつきやすい […] HARD2021:ルンバの位置をPythonプログラムで知ろう! (2021-3-11) - このページではルンバの位置を知るためのROSを使ったPythonプログラムを学びます。ここでいう位置とはROSのcreate_autonomyパッケージで計算したodometry(オドメトリ)情報です。オドメトリはロボッ […]
HARD2021:ルンバの位置をPythonプログラムで知ろう! (2021-3-11) - このページではルンバの位置を知るためのROSを使ったPythonプログラムを学びます。ここでいう位置とはROSのcreate_autonomyパッケージで計算したodometry(オドメトリ)情報です。オドメトリはロボッ […] HARD2021:シミュレータで地図作成からナビゲーションまでしよう! (2021-3-11) - シミュレータGazeboを使って地図を作り、自己位置を推定し、目的地までナビゲーションする自律移動ロボットに必要な一連のタスクをさせましょう! ここでは地図作成にgmappingパッケージ、自己位置推定にamclパッケー […] HARD2021:質問コーナー (2021-3-6) - 質問のコーナーです。ここに質問をお願いします。ご質問は下のコメント欄に書き込んでください。なお、スパム防止のため、管理者がチェックしてからコメントが表示されます。 よくある質問 ワークショップにはノートPCが必ず必要です […]
HARD2021:シミュレータで地図作成からナビゲーションまでしよう! (2021-3-11) - シミュレータGazeboを使って地図を作り、自己位置を推定し、目的地までナビゲーションする自律移動ロボットに必要な一連のタスクをさせましょう! ここでは地図作成にgmappingパッケージ、自己位置推定にamclパッケー […] HARD2021:質問コーナー (2021-3-6) - 質問のコーナーです。ここに質問をお願いします。ご質問は下のコメント欄に書き込んでください。なお、スパム防止のため、管理者がチェックしてからコメントが表示されます。 よくある質問 ワークショップにはノートPCが必ず必要です […] HARD2021:USB Linux (Ubuntu18.04)の作り方 (2021-3-6) - USBメモリにUbuntu18.04をインストールする方法を紹介します。HARD2021ではこれをUSB Linuxとよぶことにします。この方法では、Windowsのハードデスクを消費しません。Linuxシ […] HARD2021:開発環境をインストールしよう! (2021-3-5) - HARD2021の開発環境を紹介します。 注意:必ず、Ubuntuのバージョンは18.04、ROSのバージョンはMelodicにしてください。他のバージョンでは本ワークショップのソフトウェアは動きません。 対象機器 PC […] HARD2021:ワークショップに必要な知識とスキルの勉強法 (2021-3-5) - HARD2021ワークショップに必要な知識とスキルの勉強法を紹介します。ROSのお勉強だけは必須です。後は、必要に応じて取り組んでください。 ROSのお勉強 習得に要する期間:1週〜2週間 ROS Tutorial (日 […] HARD2021参加申込始まる! (2021-2-26) - HARD2021(Home AI Robot Development)スプリングワークショップの参加申込が始まりました! 日本ロボット学会インテリジェントホームロボティクス研究専門委員会主催の「知能ホームロボティクス入門 […]
HARD2021:USB Linux (Ubuntu18.04)の作り方 (2021-3-6) - USBメモリにUbuntu18.04をインストールする方法を紹介します。HARD2021ではこれをUSB Linuxとよぶことにします。この方法では、Windowsのハードデスクを消費しません。Linuxシ […] HARD2021:開発環境をインストールしよう! (2021-3-5) - HARD2021の開発環境を紹介します。 注意:必ず、Ubuntuのバージョンは18.04、ROSのバージョンはMelodicにしてください。他のバージョンでは本ワークショップのソフトウェアは動きません。 対象機器 PC […] HARD2021:ワークショップに必要な知識とスキルの勉強法 (2021-3-5) - HARD2021ワークショップに必要な知識とスキルの勉強法を紹介します。ROSのお勉強だけは必須です。後は、必要に応じて取り組んでください。 ROSのお勉強 習得に要する期間:1週〜2週間 ROS Tutorial (日 […] HARD2021参加申込始まる! (2021-2-26) - HARD2021(Home AI Robot Development)スプリングワークショップの参加申込が始まりました! 日本ロボット学会インテリジェントホームロボティクス研究専門委員会主催の「知能ホームロボティクス入門 […]Ubuntu18.04: Dockerのインストール (2021-2-25) - DockerをUbuntu18.04にインストールしたときのメモ。Dockerの公式サイトdocs.docker.comに従っている。 参考サイト Install Docker Engine on Ubuntu 古いバー […]
 Ubuntu18.04: Jupyter Labのインストール (2021-2-25) - Ubuntu18.04にJupyter Labをインストールしたときのメモ。 インストール とっても簡単! $ pip3 install jupyterlab 設 定 インストール先のパスが設定されていないので.bash […]
Ubuntu18.04: Jupyter Labのインストール (2021-2-25) - Ubuntu18.04にJupyter Labをインストールしたときのメモ。 インストール とっても簡単! $ pip3 install jupyterlab 設 定 インストール先のパスが設定されていないので.bash […] Sawyer:サンプルプログラム (2021-2-18) - MoveIt!を使ったロボットアームを制御するサンプルプログラムです。 #!/usr/bin/env python # -*- coding: utf-8 -*- import sys import copy impor […]
Sawyer:サンプルプログラム (2021-2-18) - MoveIt!を使ったロボットアームを制御するサンプルプログラムです。 #!/usr/bin/env python # -*- coding: utf-8 -*- import sys import copy impor […] Sawyer:プログラムでロボットを動かす方法 (2021-2-18) - MoveIt!を使ったロボットアームを制御するサンプルプログラムです。 #!/usr/bin/env python # -*- coding: utf-8 -*- #日本語のコメントを入れるためのおまじない import […] Sawyer:リファレンスサイト (2021-2-16) - Sawyerを使う上で参考になるサイトを紹介します。 Setup Workstation Setup Networking Software Sawyer SDK Wiki Sawyer API References S […]
Sawyer:プログラムでロボットを動かす方法 (2021-2-18) - MoveIt!を使ったロボットアームを制御するサンプルプログラムです。 #!/usr/bin/env python # -*- coding: utf-8 -*- #日本語のコメントを入れるためのおまじない import […] Sawyer:リファレンスサイト (2021-2-16) - Sawyerを使う上で参考になるサイトを紹介します。 Setup Workstation Setup Networking Software Sawyer SDK Wiki Sawyer API References S […] Sawyer: GAZEBOチュートリアル (2021-2-16) - Gazeboシミュレータの実行方法 Ubuntu端末で以下のコマンドを実行する。 ディレクトリの移動 $ cd ~/ros_ws シミュレーション環境への移行 $ ./intera.sh sim シミュレータの起動 $ […]
Sawyer: GAZEBOチュートリアル (2021-2-16) - Gazeboシミュレータの実行方法 Ubuntu端末で以下のコマンドを実行する。 ディレクトリの移動 $ cd ~/ros_ws シミュレーション環境への移行 $ ./intera.sh sim シミュレータの起動 $ […] Sawyer: シミュレータのインストール (Ubuntu18.04) (2021-2-16) - Sawyerで推奨されているUbuntuのバージョンは16.04ですが、18.04でも動くのでその方法を紹介します。 インストール 端末を開き、以下のコマンドを実行してSawyerシミュレータをインストールする。手で打ち […]
Sawyer: シミュレータのインストール (Ubuntu18.04) (2021-2-16) - Sawyerで推奨されているUbuntuのバージョンは16.04ですが、18.04でも動くのでその方法を紹介します。 インストール 端末を開き、以下のコマンドを実行してSawyerシミュレータをインストールする。手で打ち […]