この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。今回は、ROS2のもう一つの通信方式であるサービスとそれをPythonで実現する方法を学びましょう!
コンテンツ
- サービス通信
参考サイト
概 要
サービス(service)はROSの通信方法の一つで、双方向通信に使います。ある仕事をお願いするクライアント(client)とそれを処理して返すサーバー(server)からなります。今回、作成する簡単なプログラムは、[ROS2演習20-2021:亀で遊ぼう!]でrqtで使ったspawnサービスをサーバーにリクエスト(request、要求)するクライアントとそれに対して亀の名前をレスポンド(respond、応答)するサーバーです。リクエストとレスポンドは.srvファイルで決まります。次の手順でやります。
- パッケージの作成
- サーバーノードの作成
- クライアントノードの作成
ハンズオン
1.パッケージの作成
ROS2演習3-2021でパッケージを作ったように、~/ワークスペース名/srcディレクトリに移動し、ros2 pkg createコマンドでsimple_serviceパッケージとsimple_serverノードを作成する。今回新しく出た--dependenciesのオプションは依存関係のあるモジュールをpackage.xmlとexample_interfacesに追記してくれる。
$ cd ~/colcon_ws/src$ ros2 pkg create --build-type ament_python --node-name simple_server simple_service --dependencies rclpy turtlesim std_msgs
ソースコードを書く前にmy_serviceパッケージをビルドしておく。
$ cd ~/colcon_ws$ colcon build --symlink-install
2. srvの定義確認
この例ではturtlesimモジュールを使っており、リクエストとレスポンスのデータ型を定義しているsrvファイル(/opt/ros/foxy/share/turtlesim/srv/Spawn.srv)を次に示す。—の上4行がクライアントからのリクエスト、下1行がサーバーのレスポンスのデータ型を表す。float32は32ビットのfloat型、stringは文字型である。この他にint64(64ビット整数型)、float64(64ビット浮動小数点型)などもある。ここで、リクエストの(x, y, theta)は亀の位置と向き、nameは名前(空文字の場合は一意の名前をつけてくれる)、レスポンスの名前は亀の名前である。
float32 x float32 y float32 theta string name # Optional. A unique name will be created and returned if this is empty --- string name
3.サーバーノードの作成
では、依頼された仕事を処理するサーバープログラムを作ります。次のプログラムをgeditなどを使いsimple_server.pyというファイル名を付けて~/colcon_ws/src/simple_service/simple_service/simple_server.pyとして保存する。
# ファイル名 simple_server.py
import # ROS2のPythonモジュールをインポート
from turtlesim.srv import Spawn # turtlesim.srvモジュールからSpawnクラスをインポート
from rclpy.node import Node # rclpy.nodeモジュールからNodeクラスをインポート
class SimpleService(Node):
""" サーバークラス。クライアンからリクエストされた情報を端末に表示し、名前をリスポンスするサ
"""
def __init__(self):
"""コンストラクタ。ノード名はsimple_server。サービスの生成。
super().__init__('simple_server') # スーパークラスNodeのコンストラクタを呼び出してノード名をつける
self.srv = self.create_service(Spawn, 'spawn', self.spawn_callback) # (型名、サービス名、コールバック関数)
def spawn_callback(self, request, response):
"""コールバック関数。リクエストデータを受け取り、nameが空文字の場合は"kame"という名前をレスポンスとして送り返す
if request.name == '':
response.name = 'kame'
else:
response.name = request.name
self.get_logger().info('Request:x=%f, y=%f, theta=%f, name=%s\nResponse:name=%s' % (request.x, request.y, request.theta, request.name, response.name)) # 端末にリクエストとレスポンスデータを表示
return response
def main(args=None):
rclpy.init(args=args) # rclpyモジュールの初期化
simple_service = SimpleService() # ノードの作成
rclpy.spin(simple_service) # コールバック関数の呼び出し
rclpy.shutdown() # rclpyモジュールの終了処理
if __name__ == '__main__':
main()
ソースコードにコメントを掲載していますが、必要があれば補足説明します。
4.クライアントノードの作成
次に仕事を依頼するのクライアントのソースコートを作成する。以下のソースコードをsimple_client.pyという名前で~/colcon_ws/src/simple_service/simple_service/simple_client.pyとして保存する。
# ファイル名 simple_client.py
import sys # 端末から入力引数を受け取るために必要
from turtlesim.srv import Spawn
import rclpy
from rclpy.node import Node
class SimpleClient(Node):
"""クライアントクラス。端末から入力されたリクエストデータをサーバーへ送る。
"""
def __init__(self):
"""コンストラクタ。サーバーと同じ型名とサービス名を持つクライアントの生成。
型名とサービス名が同じでなければサーバーと通信できない。
"""
super().__init__('simple_client')
self.cli = self.create_client(Spawn, 'spawn') # クライアントの生成(型名、サービス名)
while not self.cli.wait_for_service(timeout_sec=1.0): # 1秒に1回サービスが利用できるかチェック
self.get_logger().info('service not available, waiting again...')
self.req = Spawn.Request() # リクエストインスタンスの生成。これにリクエストデータが格納される。
def send_request(self):
"""端末から入力された引数が順番にリクエストインスタントのx, y, theta, nameに代入される。
"""
self.req.x = float(sys.argv[1]) # 亀の位置x座標
self.req.y = float(sys.argv[2]) # 亀の位置y座標
self.req.theta = float(sys.argv[3]) # 亀の向き[rad]
self.req.name = str(sys.argv[4]) # 亀の名前
self.future = self.cli.call_async(self.req) # サービスをリクエストして、結果を非同期的に取得する
def main(args=None):
rclpy.init(args=args)
simple_client = SimpleClient() # クライアンとオブジェクトの生成
simple_client.send_request() # リクエストを送る
while rclpy.ok():
""" Futureが実行されているときは、サーバーからのレスポンスをチェックし、レスポンスがあったらその内容を端末に表示する。
rclpy.spin_once(simple_client) # コールバック関数を1回だけ呼び出す
if simple_client.future.done(): # Futureがキャンセルされるか、結果を得るたらfuture.done()がTrueになる。
try:
response = simple_client.future.result() # サーバーから非同期的に送られてきたレスポンス
except Exception as e: # エラー時の処理
simple_client.get_logger().info(
'Service call failed %r' % (e,))
else: # エラーでないときは、端末にレスポンスである亀の名前を表示する
simple_client.get_logger().info('Response:name=%s' % response.name)
break
simple_client.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
このプログラムは非同期通信のプログラムで、ROS2ではその実装にFutureというPythonのオブジェクトが広く使われている。Futureオブジェクトについては以下を参照して欲しい。
5. package.xmlの編集
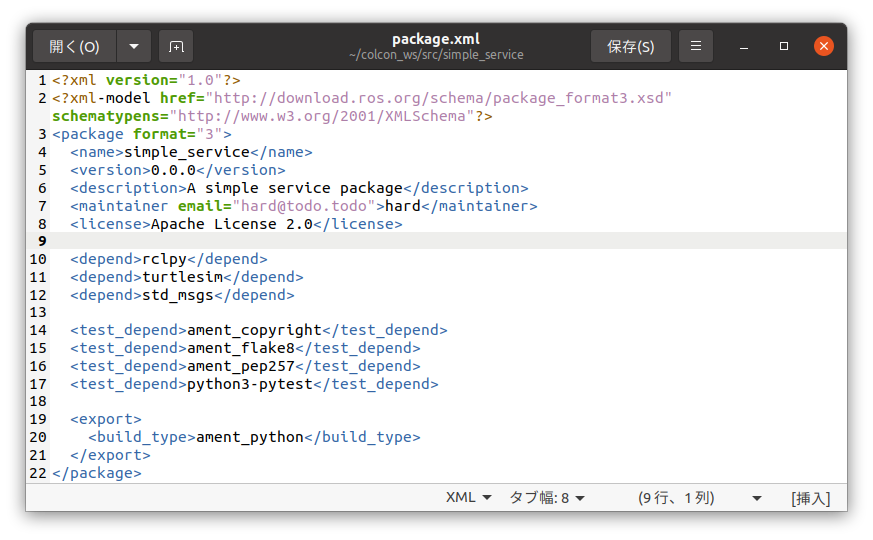
パッケージを作成するときに--dependenciesのオプションを加えて依存関係のあるモジュールを指定したのでpackage.xmlを編集しなくてもビルドできる。6行目のdescription、7行目のmaintainer、8行目のlicenseを適宜変更する。
6. setup.pyの編集
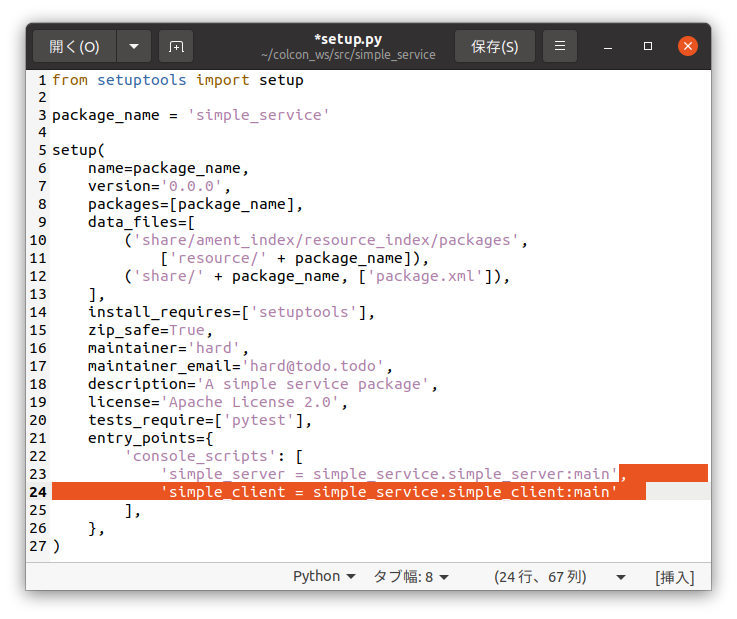
package.xmlで変更したmaintainer(16行)、maintainer_email(17行)、description(18行)、license(19行)と同じにする。パッケージを作成するときにノードsimple_serverも作成したので、エントリーポイントは23行目のように既に設定されている。新しく作成したsimple_clientノードのエントリーポイントは作成されていないので、23行目の最後に, (カンマ)を挿入し、24行目のように設定する(追加部分は赤文字)。
- ‘simple_server = simple_service.simple_server:main’,
- ‘simple_client = simple_service.simple_client:main’
7. ビルド
次のコマンドでパッケージを指定してビルドする。
$ cd ~/colcon_ws$ colcon build --symlink-install
8.実行
(1) turtlesimの起動
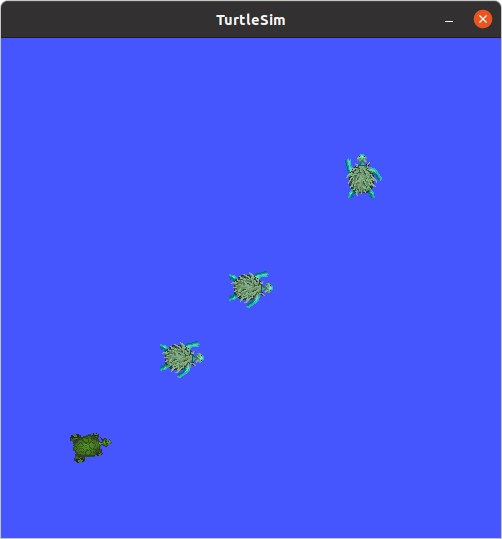
端末を開き、次のコマンドでturtlesimを起動する。下図のようにturtlesimのウインドウが表示される。
$ ros2 run turtlesim turtlesim_node
(2) サーバーの起動
次の端末を開き、次のコマンドでbyobuを起動して、Shift-F2キーを押して窓を上下に分割する。その後、上の窓でサーバーを起動する。
$ byobu- $ source ~/colcon_ws/install/setup.bash
$ ros2 run simple_service simple_serve
(3) クライアントの起動
サーバーを起動した端末の下の窓で、次のコマンドでクライアントを実行する。
$ source ~/colcon_ws/install/setup.bash$ ros2 run simple_service simple_client 10 20 3.14 ''
クライアントはキーボードから亀の位置と姿勢、名前(この例は空文字)をサーバーへリクエストする。この場合は空文字を送ったので、サーバーからのリスポンスは亀の名前’kame’となる。亀の名前をつけてリクエストするとその名前がレスポンスされる。
また、TurtleSimのウインドウにクライアントを実行するたびに亀が現れる。


成功したら終わり。うまく動かない場合は、打ち間違えや手順に間違いがないか確認し、再度実行しましょう。お疲れ様!
ホームワーク
- コマンドでもサービスを実行できます。以下のコマンドを実行して動作を確認してみよう。
- $ ros2 service call /spawn turtlesim/srv/Spawn “{x: 2, y: 2, theta: 0.2, name: ”}”
- 以下のROS2チュートリアルを読んで、ROS2のサービスに関する理解を深めよう。
- [ROS2演習2-2021:亀で遊ぼう!]ではspawnサービスの他に、killサービス、resetサービス、set_penサービス、clearサービスなどがありました。どれか一つを選び、そのサービスをリクエストするクライアントパッケージを作成して、動作を確認してください。
終わり

コメント