
ROS2 Humble Hawksbill
この記事は次のリンクを参考にROS2 Humbleのインストールと設定に関するものです。
環 境
- Ubuntu 22.04 (64bit x86)
準 備
- リポジトリの追加
sudo apt install software-properties-commonsudo add-apt-repository universe
- ROS2 GPG公開鍵を利用するための設定
sudo apt update & sudo apt install curl -ysudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
- リポジトリの追加
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
ROS2 のインストール
- リポジトリを更新したのでアップデートする。
sudo apt updatesudo apt upgrade
- デスクトップと開発ツールをインストールする。このインストールにより約4GBディスク容量が消費された。
sudo apt -y install ros-humble-desktopsudo apt -y install ros-dev-tools
設 定
- 設定スクリプトの反映。sourceコマンドはファイルにあるコマンドを現在のシェルで実行するコマンド。
source /opt/ros/humble/setup.bash
- 毎回、このコマンドを実行するのは面倒なので次のコマンドで~/.bashrcの最後の行に加える。
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
テスト
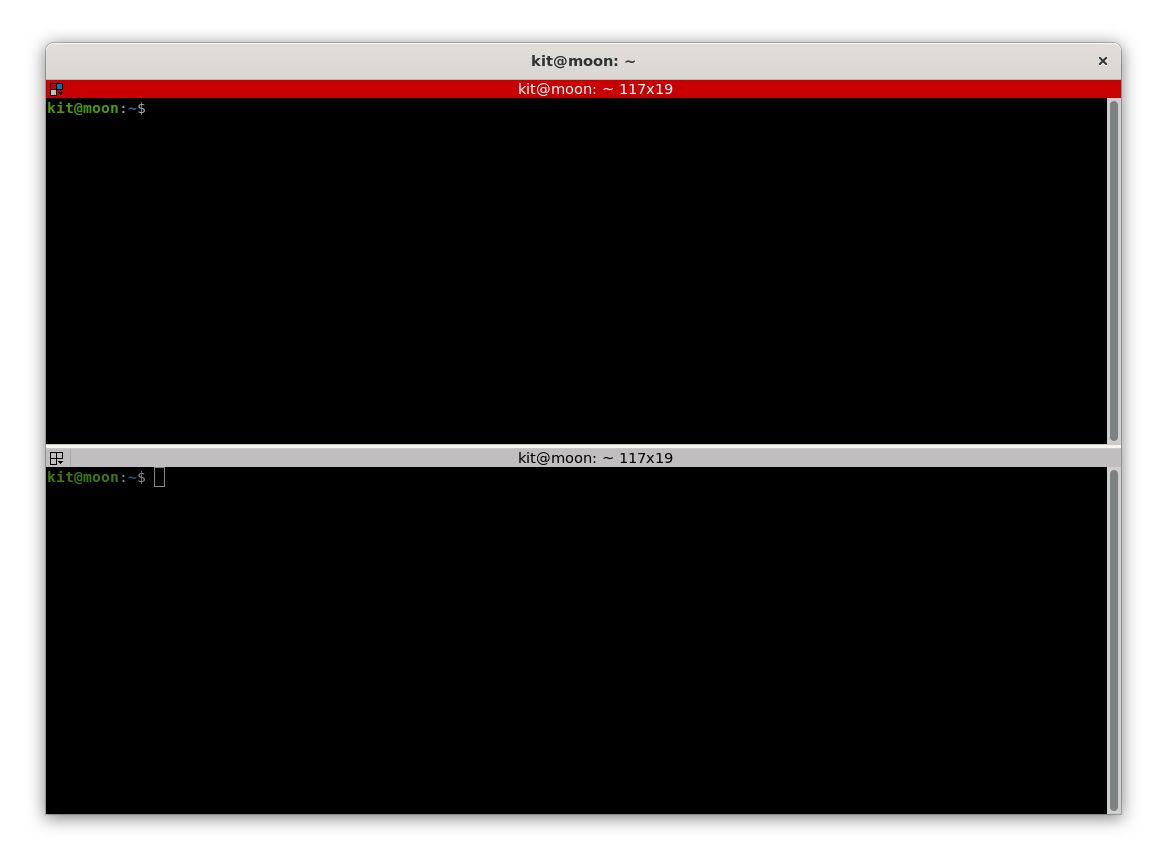
- ROS2がうまくインストールされたか、デモプログラムで確認する。まず、端末terminatorがインストールして開く。
sudo apt -y install terminatorterminator &
- 起動したら右マウスボタンをクリックして、”Split Horizontally”を選択して端末が上下に分割する。


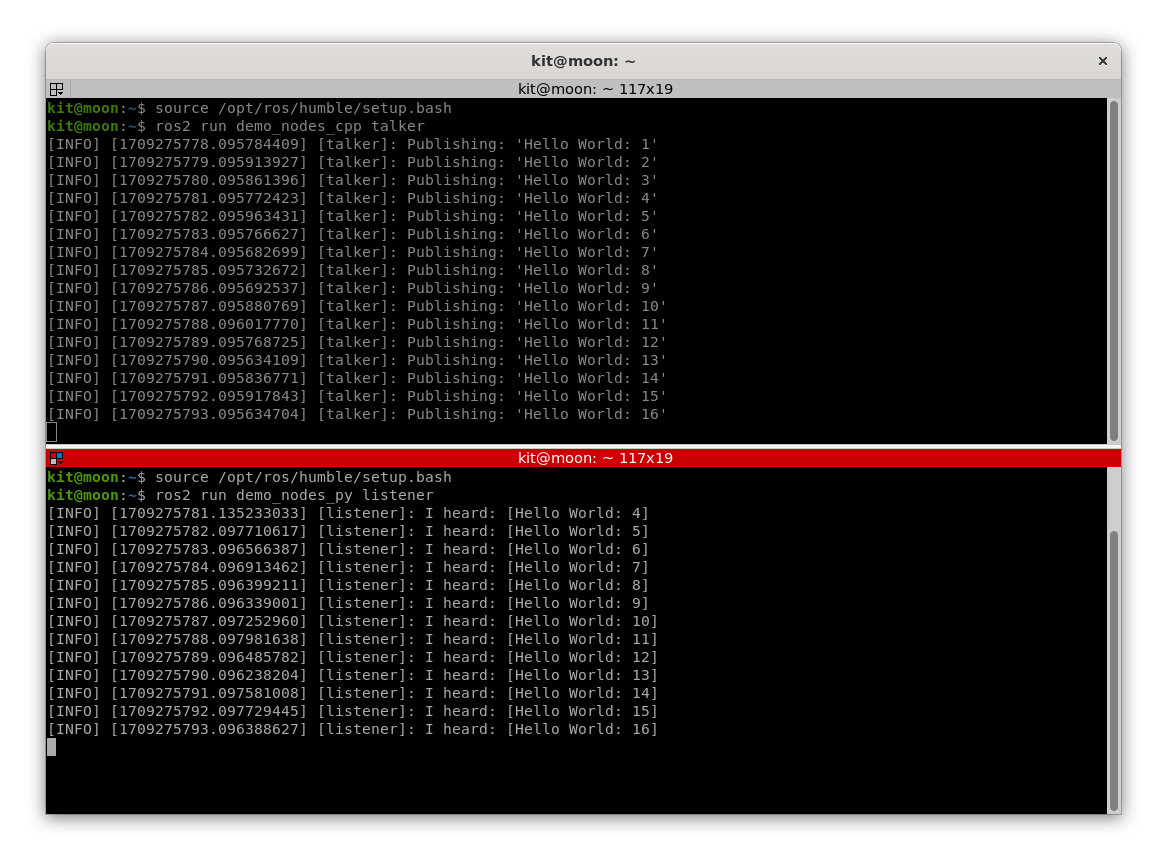
- 分割された端末の上領域に次のコマンドを打ち込む。まず、設定スクリプト(/opt/ros/foxy/setup.bash)を反映して、C++で作成されたtalkerプログラムを実行する。
source /opt/ros/humble/setup.bashros2 run demo_nodes_cpp talker
- 同様に、下領域に次のコマンドを打ち込む。listenerはPythonで作成されている。
source /opt/ros/humble/setup.bashros2 run demo_nodes_py listener
- うまく実行されると、下図のようにtalkerが送信した情報をlistenerが受信して端末に表示される。
終わり

コメント