 lecture
lecture Webots講座9-2026:PROTOファイル(アッカーマン・ビークル)
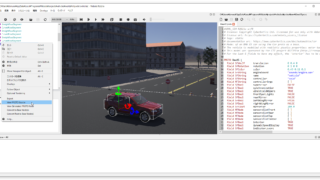
Webots講座の9回目,最終回です.Webots講座4:自分の位置を知ろうでデッドレコニングを実装するハンズオンがありました.デッドレコニングを実装するには,そのロボットのホイールベースなどのパラメ...
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 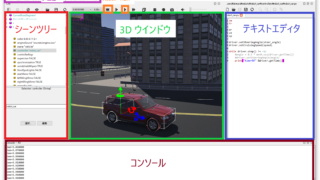 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  education
education  education
education  education
education  education
education  education lecture lecture lecture lecture lecture lecture lecture
education lecture lecture lecture lecture lecture lecture lecture  lecture
lecture  lecture
lecture  education
education  education
education  education
education  education
education  education
education