 robocup
robocup robot
robocup robocup Happy Robot for RoboCup@Home 2026
 robocup@home
robocup@home Description of the approaches and information on scientific achievements
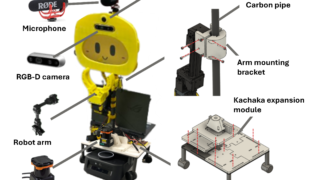
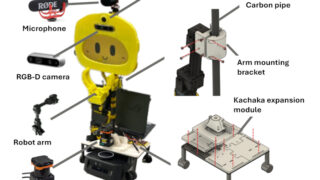
The Happy Robot team develops an open-hardware platform Happy Edu to lower entry barriers for RoboCu...
 robocup@home
robocup@home Happy Edu
Since 2015, our robots have featured a friendly, approachable design to encourage acceptance among c...
robocup@home Previous participation in RoboCup Japan Open and rankings
RoboCup Japan Open 3rd place in 2025 (Competition, @Home OPL) 2nd place in 2025 (Open challenge, @Ho...
robocup@home Previous participation in RoboCup World Championship and rankings
RoboCup World Championship 2nd place in 2024 (@Home Playground) 2nd place in 2023 (@Home Education W...
Books since 2020
This is a detailed explanation of my books published since 2020. These textbooks, based on our exper...
robocup@home Journal Papers since 2020
This is a list of papers published in the journal since 2020. Akitsugu Hasegawa, Kosei Demura: Devel...
 robocup
robocup RoboCup2026世界大会@Homeリーグ各チームの技術資料をまとめてみた
下記のサイトで公開されているRoboCup2026世界大会 RoboCup@Homeに出場予定の各チームの技術資料をChatGPTにまとめてもらいましたので添付します。我々もチームも世界大会には開発中...
 robocup
robocup フィジカルAIで生活支援ロボットの未来を切り拓く
KITウェブサイトのトップページで、RoboCup2026世界大会の資格審査に研究室チームが合格したことが紹介されました。なお、世界大会でトップチームと戦える新型ロボットを開発中です。
 robocup@home
robocup@home Happy RobotチームがRoboCup2026世界大会の出場権獲得
RoboCup2026世界大会のRoboCup@Homeリーグに、KIT出村研究室Happy Robotチームが出場権を獲得しました。@Homeリーグは生活支援ロボットの研究開発促進が目的であり、昨年...
 AIロボット入門
AIロボット入門 拙著「ROS2とPythonで作って学ぶAIロボット入門 改訂第2版」2025年2月14日出版
拙著「ROS2とPythonで作って学ぶAIロボット入門 改訂第2版」が2025年2月14日に出版されます。現在、Amazonで予約受付中です。大学や高専の授業、企業の新人研修やリスキリングの教科書に...
 robot
robot WRS FCSC2024で優勝したHappy Robotチームの動画公開!
WRS FCSC 2024 陳列サブタスクで2回とも満点を取った金沢工業大学出村研究室Happy Robotチームの動画を初公開します。おにぎりを9個同時に把持できる独自開発した機構が特徴です。同時に...
 robot
robot 金沢工大出村研究室Happy RobotチームがWRS FCSC 2024で悲願の断トツの初優勝!
2024年11月11日から15日まで、インテックス大阪で開催された「WRS Future Convenience Store Challenge 2024(WRS FCSC 2024)」で、金沢工業大...
 robocup@home
robocup@home カチャカでロボカップ9:ゲームコントローラで動かそう♪
はじめに今回は小ネタです。ROS2のteleop_twist_joyパッケージを使いPS4 DUALSHOCKなどのゲームコントローラでカチヤカを遠隔操縦する方法を説明します。 teleop_twis...
 robocup@home
robocup@home カチャカでロボカップ8:ROS2 Navigation2で動かそう♪
はじめにこの記事はPreferred Roboticsの寺田さんの記事を参考にカチャカをROS2のNavagation2で動かした過程をまとめ、デモ動画を掲載したものです。詳細な説明は次の寺田さんの記...
 robocup@home
robocup@home カチャカでロボカップ7:カチャカをROS2で動かそう♪
はじめにこの記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「ROS2」を自分のPCで実行した過程を記事にしたものです。最後のおまけに、ROS2でお馴染みのteleop_t...
 ROS2
ROS2 ROS2:Humbleのインストール
この記事は次のリンクを参考にROS2 Humbleのインストールと設定に関するものです。 Installation/Ubuntu (Debian packages), docs.ros.org環 境 ...
 robocup@home
robocup@home カチャカでロボカップ6:Playgroundで自作プログラムを動かそう♪(Ubuntu22.04)
はじめにこの記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「Playground」を自分のPC(Ubuntu22.04)で実行するために必要な作業を補足して、簡単な自作サ...
 robocup@home
robocup@home カチャカでロボカップ6:Playgroundで自作プログラムを動かそう♪(Windows11)
はじめにこの記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「Playground」を自分のPCで実行するために必要な作業を補足して、簡単な自作サンプルプログラムをsshで...
 robocup@home
robocup@home カチャカでロボカップ5:カチャカAPIとは♪
はじめにこの記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「カチャカAPIライブラリ」までを自分のPCで実行して、いくつかの面白いサンプルプログラムを説明した記事です。 ...
 robocup@home
robocup@home カチャカでロボカップ4:JupyterLabで動かしてみた♪
はじめにこの記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「サンプルコードをJupyterLabで実行する」までを自分のPCで実行して、いくつかの面白いサンプルプログラム...
 robocup@home
robocup@home カチャカでロボカップ3:カチャカとおうちのロボット達♪
カチャカが家に来るまでは、既にマイホームにいたブラーバとルンバより大きいと思っていたが、納品された箱を開封したときにパット見、小さいという印象だった。そこで、ブラーバとルンバとカチャカを並べて写真を撮...
 robocup@home
robocup@home カチャカでロボカップ2:カチャカが研究室にやってきた♪
カチャカが研究室にやってきました♪ 2月14日(木)に注文して2月19日(火)に納品です。Amazonとはいきませんが、すぐ納品して頂き感謝です。今回はオーダーしたのは次の3点で計¥252,560円(...
 robocup@home
robocup@home カチャカでロボカップ1:プロローグ♪
RoboCup@Home Educationの運営を担当しているdemuです。RoboCup@Homeは家庭環境において、人の暮らしに役立つ生活支援ロボットの開発を目的としたプロジェクトです。@Hom...
 ROS2
ROS2 WSL2(Ubuntu22.04)のインストール
ROS2 HumbleをWindows 11のWSL2 (Windows Subsytem for Linux) で使うため、Ubuntu22.04を指定してWSL2をインストールしたときのメモ。環 ...
 robocup
robocup RoboCup 2023 世界大会:Happy Robotチーム準優勝
概 要2023年7月6日~7月10日までフランスのボルドー市で開催されたRoboCup2023世界大会に出場した金沢工業大学ロボティクス学科出村研究室Happy Robotチームが準優勝の成績を収めた...
 robocup@home
robocup@home Happy Robot 2023 for RoboCup@Home Education
次のURLはRoboCup世界大会2023 @Home Education Workshop & Challengに出場する金沢工業大学 ロボティクス学科 出村研究室 Happy Robotチームのオ...
 robocup@home
robocup@home RoboCup2023世界大会:Happy Robot審査資料
金沢工業大学 Happy Robotチームの世界大会審査用ウェブサイトです.テクニカルビデオテクニカルペーパー Happy Robot 2023 Team Description Paperウェブサイ...
 robocup@home
robocup@home RoboCup Japan Open 2023 @Home Education Open Challenge 準優勝
出村研究室Happy Robot Educationチームが準優勝しました.RoboCup Japan Open 2023 @Home Educationリーグに出場した金沢工業大学出村研究室Happ...