 robocup@home
robocup@home AIロボット本:日本ロボット学会賞受賞
RoboCup Japan Open 2023の表彰式で,AIロボット本で共著の先生と日本ロボット学会@ホームリーグ賞を頂きました。これも読者皆様のおかげです。ありがとうございます!
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  education
education  lecture
lecture  robot
robot  robot
robot  robot
robot  robot robot
robot robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot 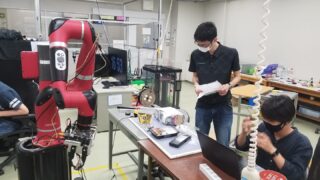 robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2 