 ROS2
ROS2 ROS2演習3-2021:はじめてのROS2プログラミング (Python)
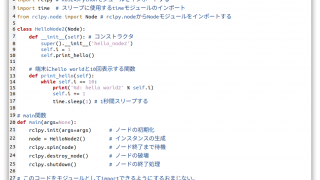
この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。演習3では次のコンテンツを学びます。コンテンツ ワークスペー...
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2 lecture
ROS2 lecture  HARD
HARD  HARD
HARD  HARD HARD HARD HARD HARD
HARD HARD HARD HARD HARD  HARD
HARD  HARD
HARD  HARD
HARD  HARD
HARD  HARD
HARD  HARD
HARD  HARD
HARD  HARD
HARD  HARD
HARD  HARD
HARD  HARD
HARD  HARD
HARD  HARD
HARD  HARD HARD
HARD HARD  HARD HARD
HARD HARD