インストール
- Ubuntu端末を開き、以下のコマンドを実行してシミュレータをインストールする。手で打ち込まないでコピペしてください。
$ sudo apt-get install python-catkin-tools gazebo7 ros-kinetic-qt-build ros-kinetic-gazebo-ros-control ros-kinetic-gazebo-ros-pkgs ros-kinetic-ros-control ros-kinetic-control-toolbox ros-kinetic-realtime-tools ros-kinetic-ros-controllers ros-kinetic-xacro python-wstool ros-kinetic-tf-conversions ros-kinetic-kdl-parser ros-kinetic-sns-ik-lib$ cd$ mkdir -p ~/ros_ws/src$ cd ~/ros_ws/src/$ git clone https://github.com/RethinkRobotics/sawyer_simulator.git
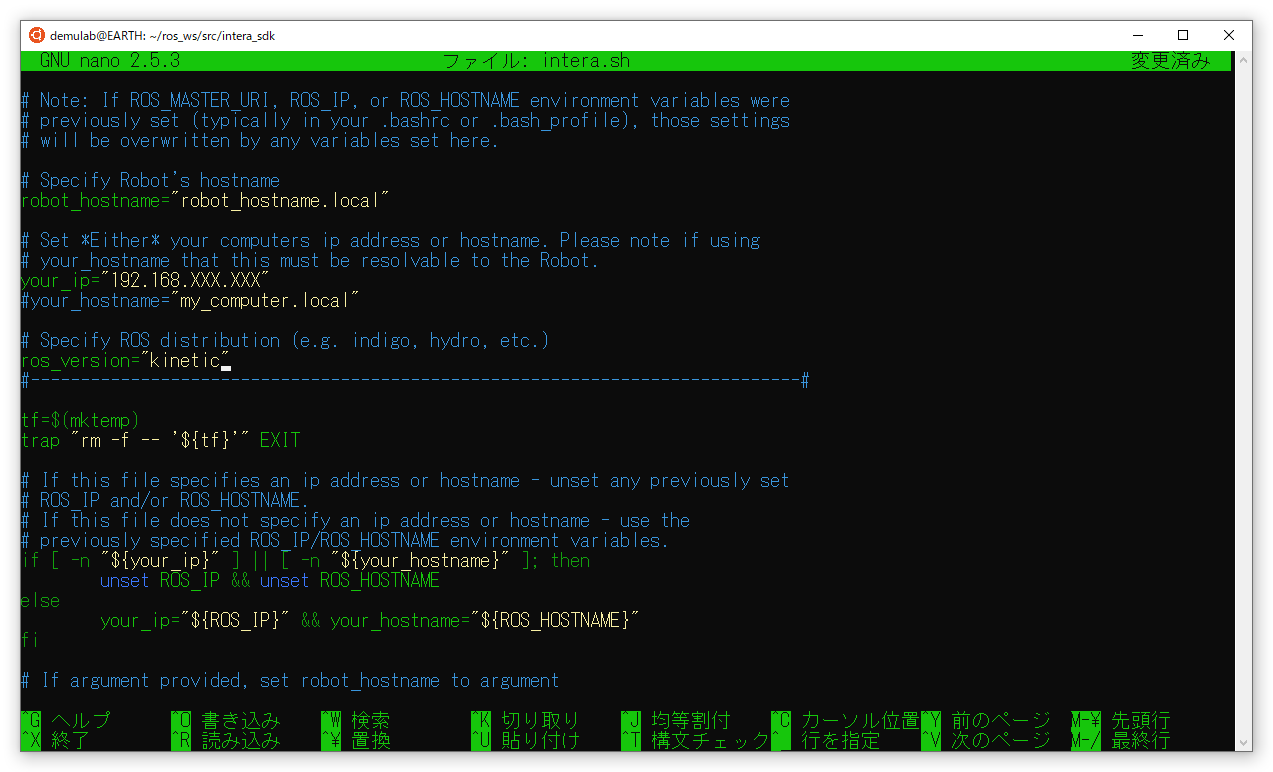
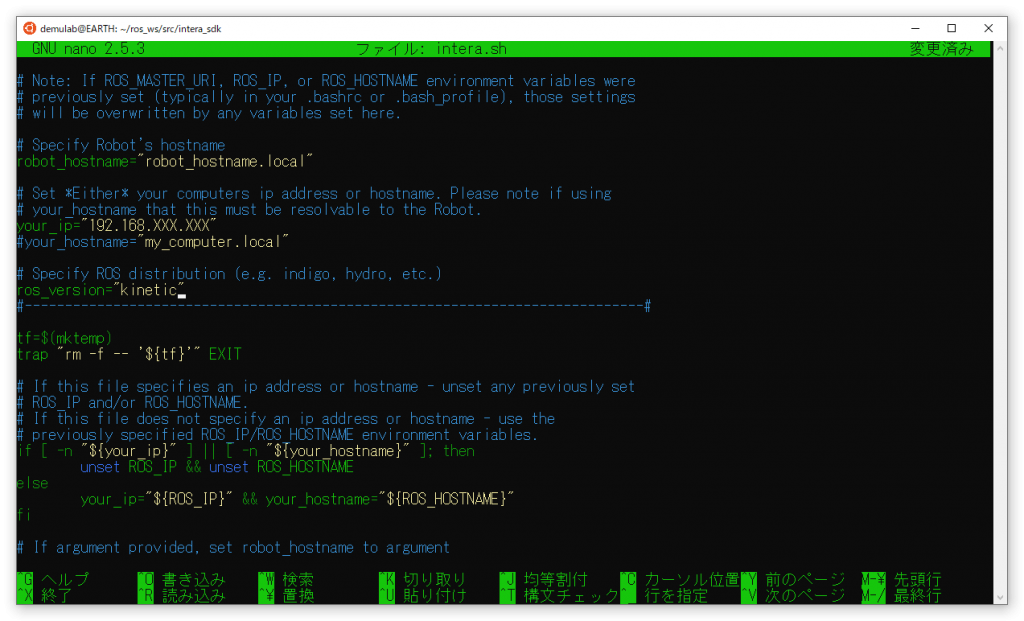
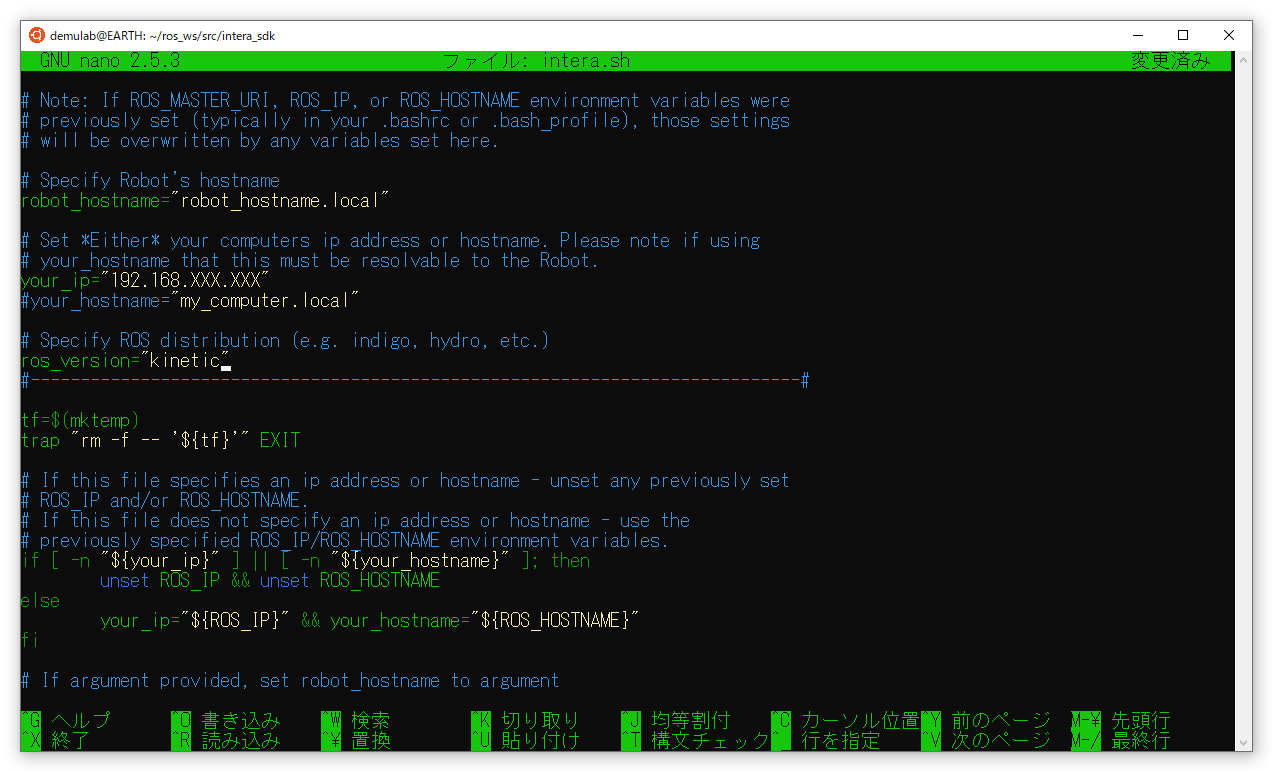
$ wstool init .$ wstool merge sawyer_simulator/sawyer_simulator.rosinstall$ wstool update$ cd ..- geditを使って~/ros_ws/src/intera_sdk/intera.shの30行目を以下のように変更する。
$ gedit ~/ros_ws/src/intera_sdk/intera.sh- 30行目: ros_version=”kinetic”
- intera.shを~/ros_ws下にコピーする。
$ cd ~/ros_ws$ cp ~/ros_ws/src/intera_sdk/intera.sh .$ source /opt/ros/kinetic/setup.bash$ catkin build
設 定
- ros_ws以下にインストールしたアプリを有効にするために、geditを使って~/.bashrcの最後に以下の1行を追加する。
source ~/ros_ws/devel/setup.bash
終わり
コメント