この記事は私が金沢工業大学ロボティクス学科で2020年度後学期に担当したロボットプログラミングⅡをROS2用に変更したものです。第1回でROS2をインストール、設定、動作を確認しました。第2回は、ROSの定番であるタートルシム(turtlesim)でROS2を体験してみましょう。なお、タートルは海亀のことでROSのマスコットで、Turtlesimは亀の2次元シミュレータです。この記事はROS2 Documentation Tutorialsの次の記事を改変しています。
参考サイト
インストールと確認
- 次のコマンドでturtlesimパッケージをインストールする。パッケージはある目的のために作られたソフトウェア一式で一つのディレクトリにまとめられている。turtlesimパッケージは亀の2次元シミュレータに関するソフトウェア一式となっている。
$ sudo apt update$ sudo apt install ros-foxy-turtlesim
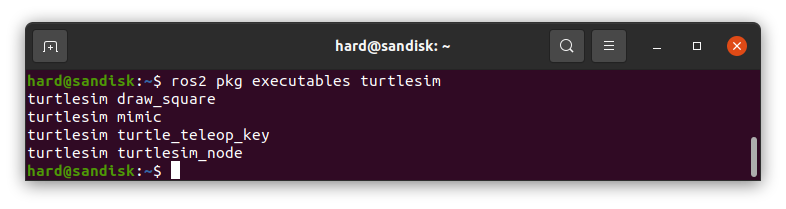
- インストールしたパッケージの実行可能ファイルを次のコマンドで確認しよう。
$ ros2 pkg executables turtlesim
- 無事インストールされていれば次のようにdraw_square、mimic、turtle_teleop_key、turtlesim_nodeの4つの実行可能ファイルが表示される。表示されない場合はもう一度、インストールしてみよう。
実 行
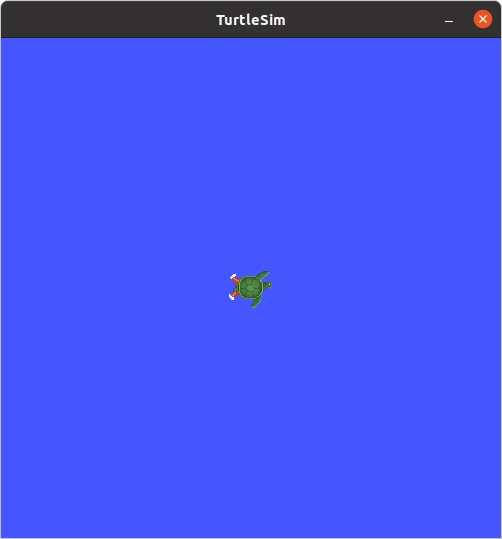
- では、端末を開き、次のコマンドでturtlesimを起動しましょう。
$ ros2 run turtlesim turtlesim_node
-
- 端末には次のようにturtlesimのノード名/turtlesim、亀の名前 [turtle1]、姿勢(x, y, theta)が表示される。ノードはROSの実行中のプログラムで、Spawningのspawnは魚や蛙などが卵を生む意味であり、コンピュータゲームでキャラクタが登場する意味でも使われる。ここでは亀だけに2つをかけているのでしょうね。

- 端末には次のようにturtlesimのノード名/turtlesim、亀の名前 [turtle1]、姿勢(x, y, theta)が表示される。ノードはROSの実行中のプログラムで、Spawningのspawnは魚や蛙などが卵を生む意味であり、コンピュータゲームでキャラクタが登場する意味でも使われる。ここでは亀だけに2つをかけているのでしょうね。

亀を動かそう!
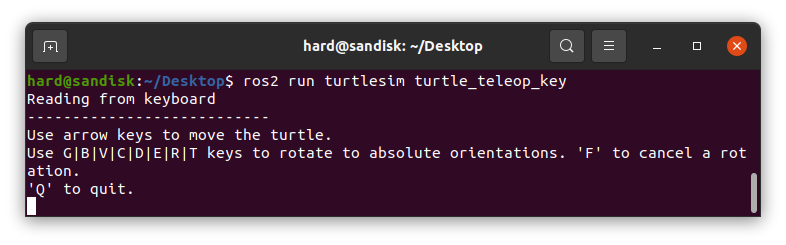
- 端末を開き、次のコマンドでキー操作により亀を動かしましょう。次のコマンドでrunがノードを実行するコマンドで、turtlesimがパッケージ名、最後のturtle_teleop_keyが実行可能ファイル。
$ ros2 run turtlesim turtle_teleop_key
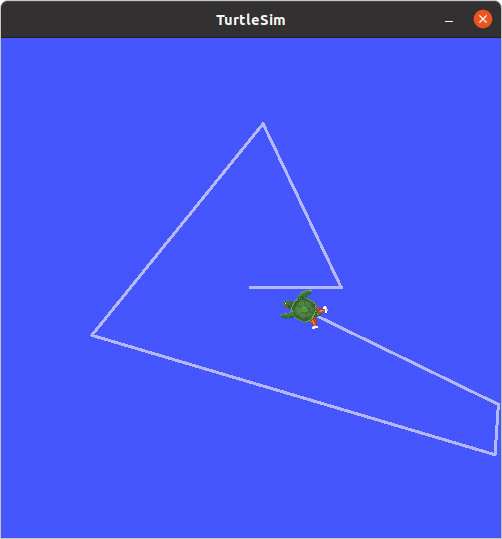
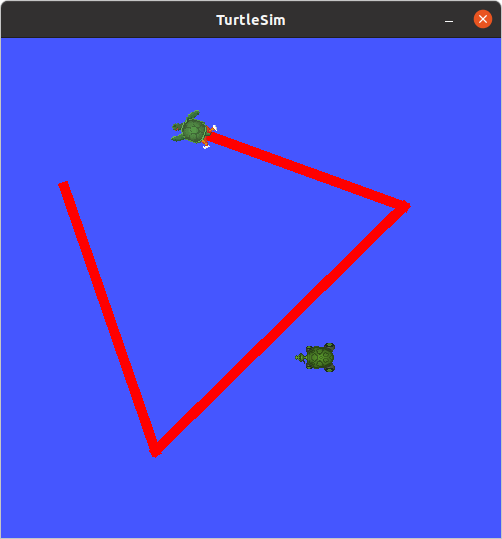
- 端末には下図のように表示される。矢印キーで亀を動かすことができる。さっそく、矢印キーを押して亀を動かしてみましょう!亀が動くと動いた軌跡が白線で表示される。
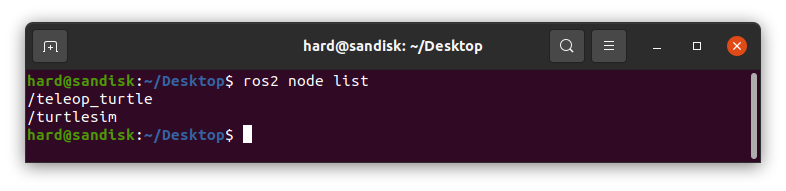
- 現在、実行されているノードを次のコマンドで確認しよう。ros2 runコマンドで実行したteleop_turtleとturtlesimノードが実行されていることがわかる。
$ ros2 topic list
GUI開発ツールrqt
- ROSのQTペースのGUI開発ツールrqtをインストールして、さっそく使ってみましょう。
- インストール
$ sudo apt update$ sudo apt install ~nros-foxy-rqt*
- 起動
- 端末を開き、次のコマンドを実行する。次の空白のウインドウが開く。
- $ rqt
- $ rqt
- 端末を開き、次のコマンドを実行する。次の空白のウインドウが開く。
- 使い方
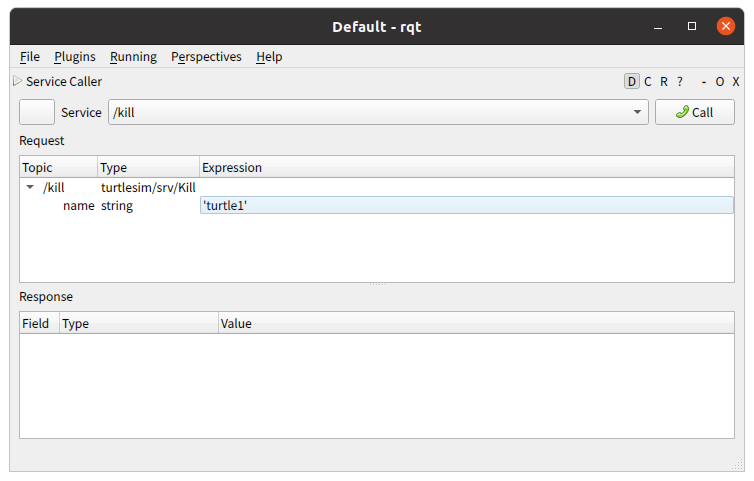
- /killサービス:亀を消す/killサービスを実行しましょう。rqtのメニューPlugins→Services→Service callerをクリックすると色々なサービスが出てくる。その中の[/kill]を選択する。下図のように[Expression]を”turtle1″にして、右上の[Call]をクリックする。亀と軌跡の白線が消える。
- /resetサービス:次にリセットする/resetサービスを同様にqtのメニューPlugins→Services→Service callerから選択して実行する。次のようにまた、turtle1が画面中央に現れる。端末には次のようにturtlesimがリセットされたことと、turtle1の姿勢が表示される。

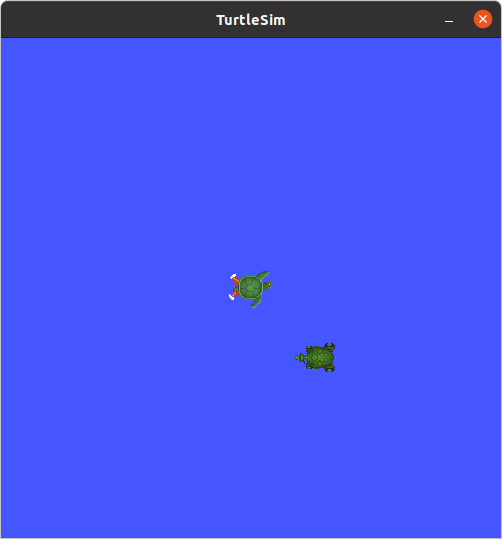
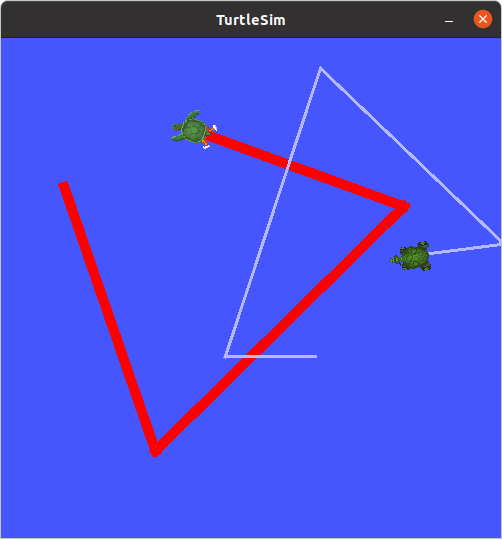
- /spawnサービス:新しい亀を生成する/spawnサービスを実行しましょう。同様にして、rqtのメニューPlugins→Services→Service callerを選択して、/spawnサービスを選択する。次のように設定して、[Call]をクリックして新しい亀を誕生させましょう。下図のように中央より少し右下に新しい”kame”が誕生する。
- x: 7.0
- y: 4.0
- theta: 3.14
- name: “kame”
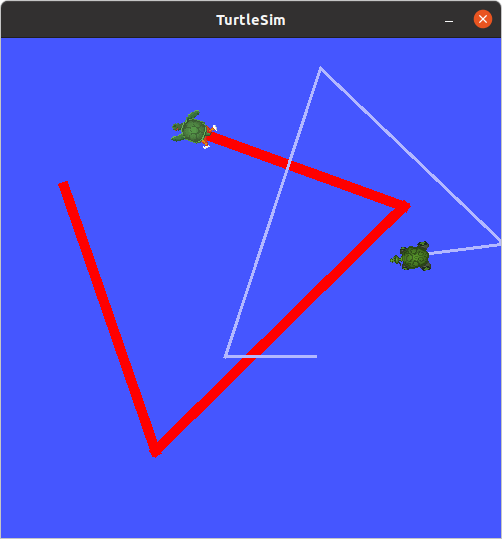
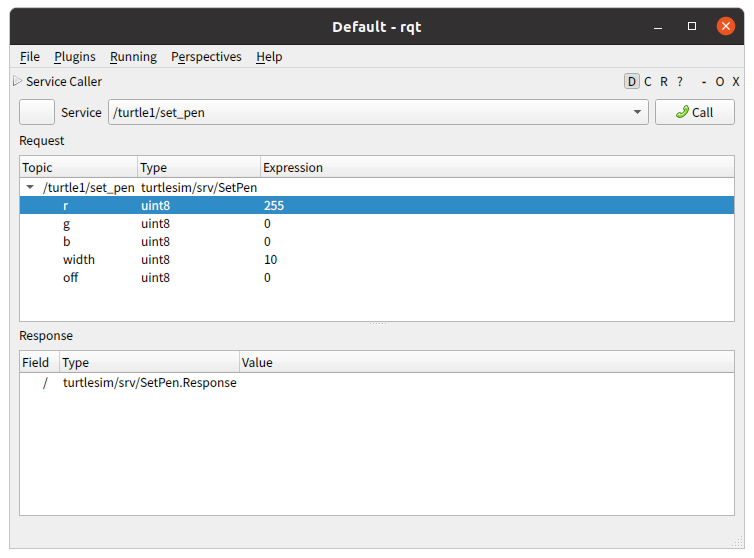
- /set_penサービス:軌跡の色を変更する/set_penサービスを使ってみよう。[Service]を”/turtle1/set_pen”を選ぶ。turtle1がない場合は[Service]の左の[ボタン]をクリックする。黄色で線の太さ10になるようにExpressionを次のように変更する。では、上で亀を動かしたようにturtle_teleop_keyノードを使って、適当に亀を動かして軌跡の色と太さが変わるのを確認する。
- r: 255
- g: 255
- width: 10
- /clearサービス:亀の軌跡を消す。
- /killサービス:亀を消す/killサービスを実行しましょう。rqtのメニューPlugins→Services→Service callerをクリックすると色々なサービスが出てくる。その中の[/kill]を選択する。下図のように[Expression]を”turtle1″にして、右上の[Call]をクリックする。亀と軌跡の白線が消える。
- リマップ
- トピック名を付け替えるリマップを使い、先程動かしたturtle_teleop_keyを使って新しく生成したkameを動かしてみましょう。新しい端末を開き次のコマンドを実行する。
$ ros2 run turtlesim turtle_teleop_key --ros-args --remap turtle1/cmd_vel:=kame/cmd_vel
- トピック名を付け替えるリマップを使い、先程動かしたturtle_teleop_keyを使って新しく生成したkameを動かしてみましょう。新しい端末を開き次のコマンドを実行する。
- 終 了
- では、turtlesimを終了させましょう。TurtleSimウインドウの[☓]をクリックするか、起動した端末でCtrl-C(コントロールキーを押しながらCキーを押す)を押すとノードが終了する。turtle_teleop_keyノードを終了させるときは、それを実行した端末でCtrl-Cを押すか、qキーを押す。
- 今回の記事はこれで終わりです。お疲れ様!

終わり
終わり
コメント