
Gazeboシミュレータの実行方法
- Ubuntu端末で以下のコマンドを実行する。
- ディレクトリの移動
$ cd ~/ros_ws
- シミュレーション環境への移行
$ ./intera.sh sim
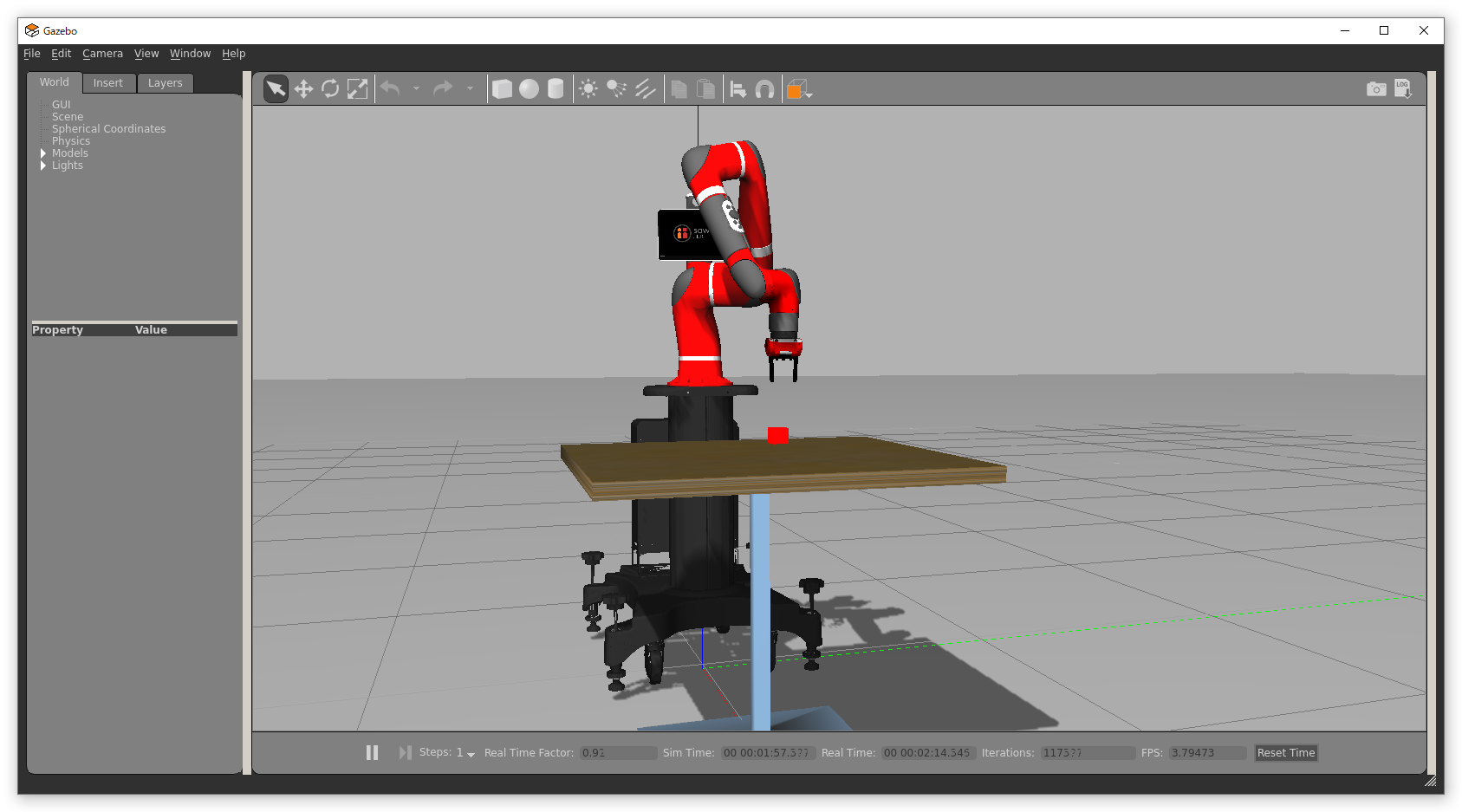
- シミュレータの起動
$ roslaunch sawyer_gazebo sawyer_world.launch electric_gripper:=true
- ディレクトリの移動
動作テスト
- 別のUbuntu端末を開き、以下のコマンドを実行して動作を確認する。
$ cd ~/ros_ws$ ./intera.sh sim$ rosnode list- このコマンドを実行すると次のように表示される。
/base_to_world /camera_sim /gazebo /gazebo_gui /intera_camera_nodelets /io/internal_camera/head_camera/rectify_color /io/internal_camera/right_hand_camera/rectify_mono /io_robot /robot_state_publisher /rosout
- このコマンドを実行すると次のように表示される。
$ rostopic list- このコマンドを実行すると次のように表示される。
/clock /gazebo/link_states /gazebo/model_states /gazebo/parameter_descriptions /gazebo/parameter_updates /gazebo/set_link_state /gazebo/set_model_state /head_camera/parameter_descriptions /head_camera/parameter_updates /io/internal_camera/config /io/internal_camera/head_camera/camera_info /io/internal_camera/head_camera/command /io/internal_camera/head_camera/config /io/internal_camera/head_camera/image_raw /io/internal_camera/head_camera/image_raw/compressed 多いので省略 /robot/state /rosout /rosout_agg /tf /tf_static
- このコマンドを実行すると次のように表示される。
$ rostopic echo /robot/state- このコマンドを実行すると次のように表示され続ける。 ^-C(コントロールキーを押しながらCキーを押す)で終了します。
enabled: False stopped: False error: False estop_button: 0 estop_source: 0 ---
- このコマンドを実行すると次のように表示され続ける。 ^-C(コントロールキーを押しながらCキーを押す)で終了します。
サンプルプログラムの実行
- 準備:サンプルプログラムの赤い立方体(ボックス)では把持に失敗するので以下の3次元モデルファイルと置き換える。立方体の辺長を45mmから40mmに小さくしている。
- 元のファイルmodel.urdfの名前をmodel.urdf.orgに変える。
$ cd ~/ros_ws/src/sawyer_simulator/sawyer_sim_examples/models/block$ mv model.urdf model.urdf.org
- 以下の新しいファイルmodel.urdf.txtをダウンローする。拡張子にtxtがついているのは、このウェブサイトからダウンロードするため。
- ダウンロードしたファイルmodel.urdf.txtをmodel.urdfに名前を変えて移動する。この例では~/Downloadsにダウンロードしているとする。
$ mv ~/Downloads/model.urdf.txt ~/ros_ws/src/sawyer_simulator/sawyer_sim_examples/models/block/model.urdf
- 元のファイルmodel.urdfの名前をmodel.urdf.orgに変える。
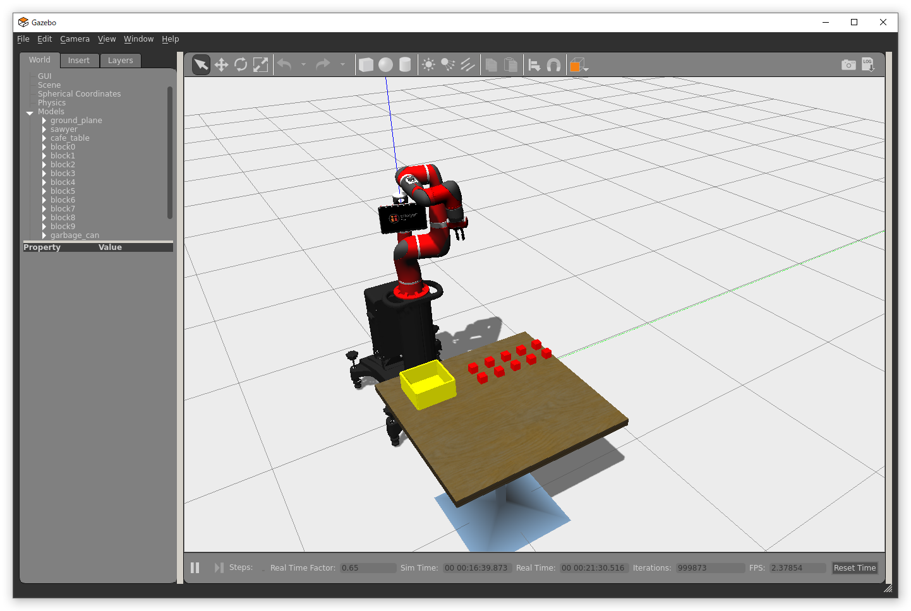
- ピック&プレースのサンプルプログラム。上図のようにロボットがデモをすれば成功。
$ cd ~/ros_ws$ ./intera.sh sim$ roslaunch sawyer_sim_examples sawyer_pick_and_place_demo.launch
終わり
コメント