
本記事では、カナダのSimon Fraser University, Autonomy Lab.のJacob PerronさんのフォークしたiRobot社のRoomba, Create2用のROSドライバーパッケージcreate_autonomyの使用を前提としています。
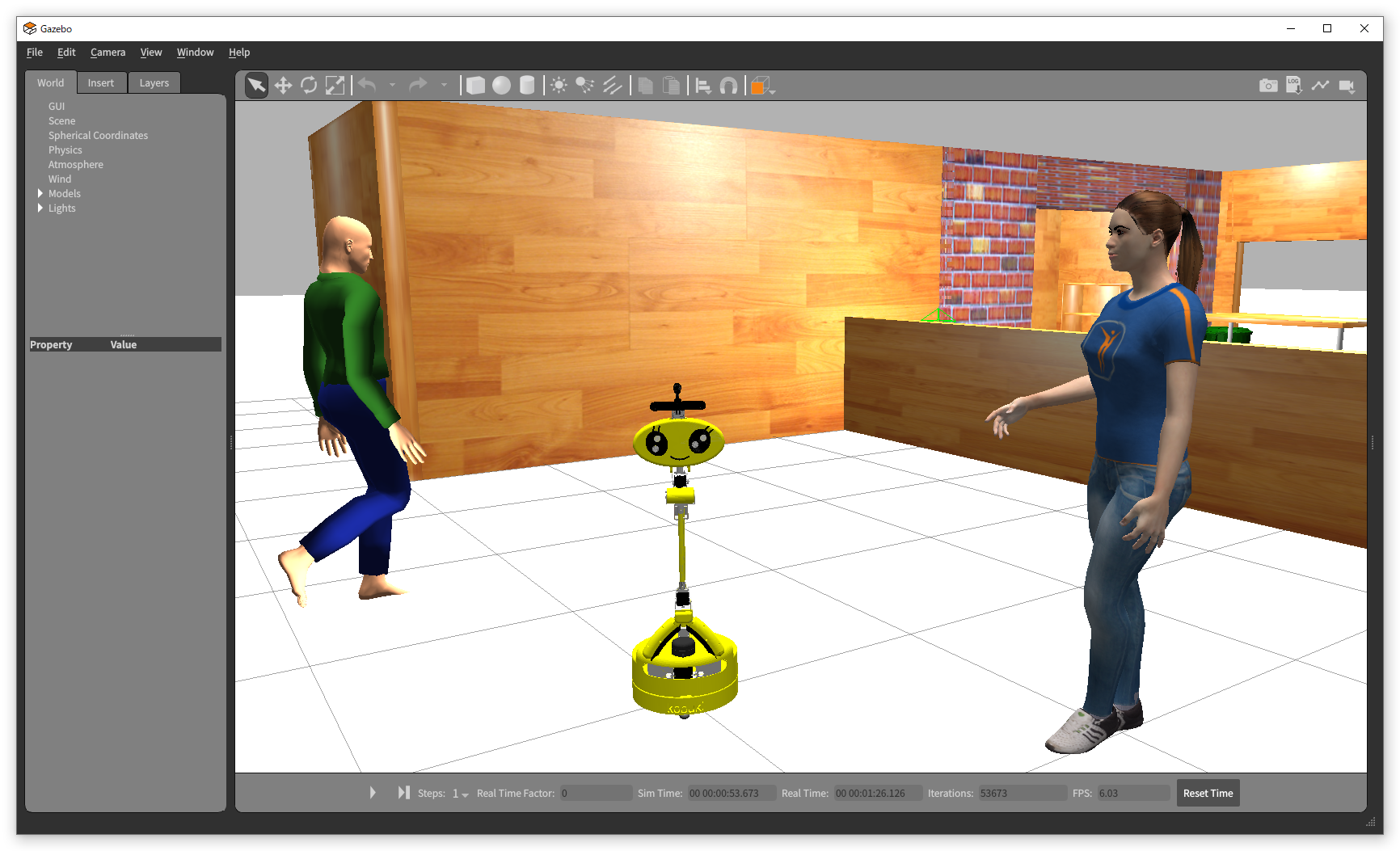
1.Gazeboで必要な3Dモデルをインサートして、好きな名前に拡張子worldをつけてホームディレクトリに保存する。ここではファイル名をhappy.worldとする。
2.worldファイルをコピーする。
$ cp ~/happy.world ~/catkin_ws/src/create_autonomy/ca_gazebo/worlds
3.コピーしたファイルの名前から拡張子を取ったものをenvに代入してgazeboを起動する。もし、ファイル名がmy.worldなら、以下のコマンドの最後はenv:=myとなる。
$ roslaunch ca_gazebo create_empty_world.launch env:=happy
終わり

コメント