WebotsをインストールしてROS2で使うためのメモ。Webotsはオープンソースの3次元ロボットシミュレータ。1996年にスイス連邦工科大学ローザンヌ校(EPFL)のOliver Michel博士が開発したものが元になり、1998年からはCyberbotics社が開発を進めている。昔から名前は知っていたが、2018年12月から無料オープンソースになり、Apache 2.0ライセンスでリリースされている。物理エンジンはODE(Open Dynamics Engine)をベースにしているので、個人的には馴染みやすい。ROS2でGazeboの代わりにWebotsを使っているリポジトリを見るし、ロボカップジュニアのサッカーシミュレータにも採用される。メジャーになるのか? Spotのデモはかわいい。
参考リンク
環 境
- Ubuntu20.04
- ROS2 Foxy
インストール
- 参考リンク Installation on LinuxのDebian Package with the Advanced Packaging Tool (APT)のとおりに実施。
- 認証
$ wget -qO- https://cyberbotics.com/Cyberbotics.asc | sudo apt-key add -
- リポジトリの追加と更新
$ sudo apt-add-repository 'deb https://cyberbotics.com/debian/ binary-amd64/'$ sudo apt update
- インストール
$ sudo apt install webots
- 認証
実 行
- 端末を開き、次のコマンドを実行する。
- $ webots
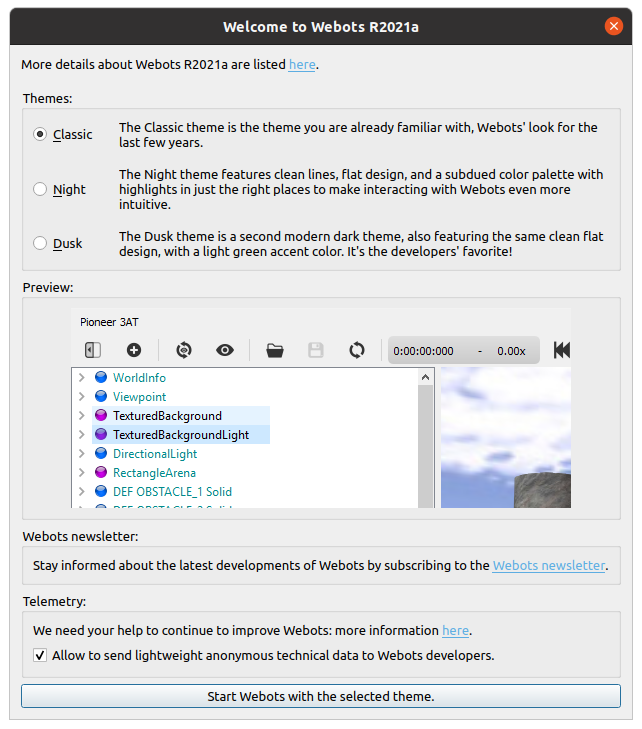
- 初回時は次のWelcomeウインドウが開くので、最下部の[Start Webots with the selected themes.]をクリックする。
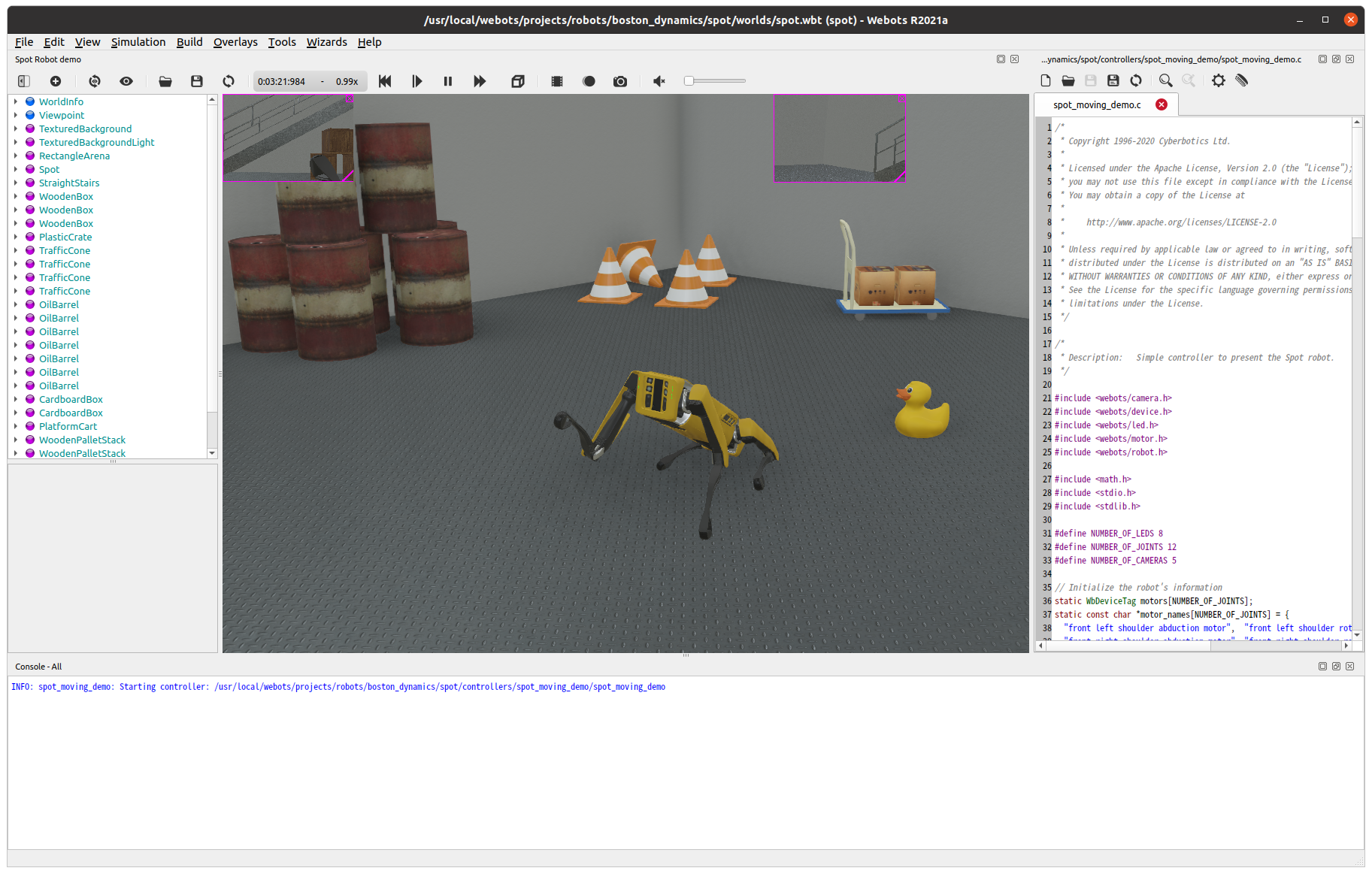
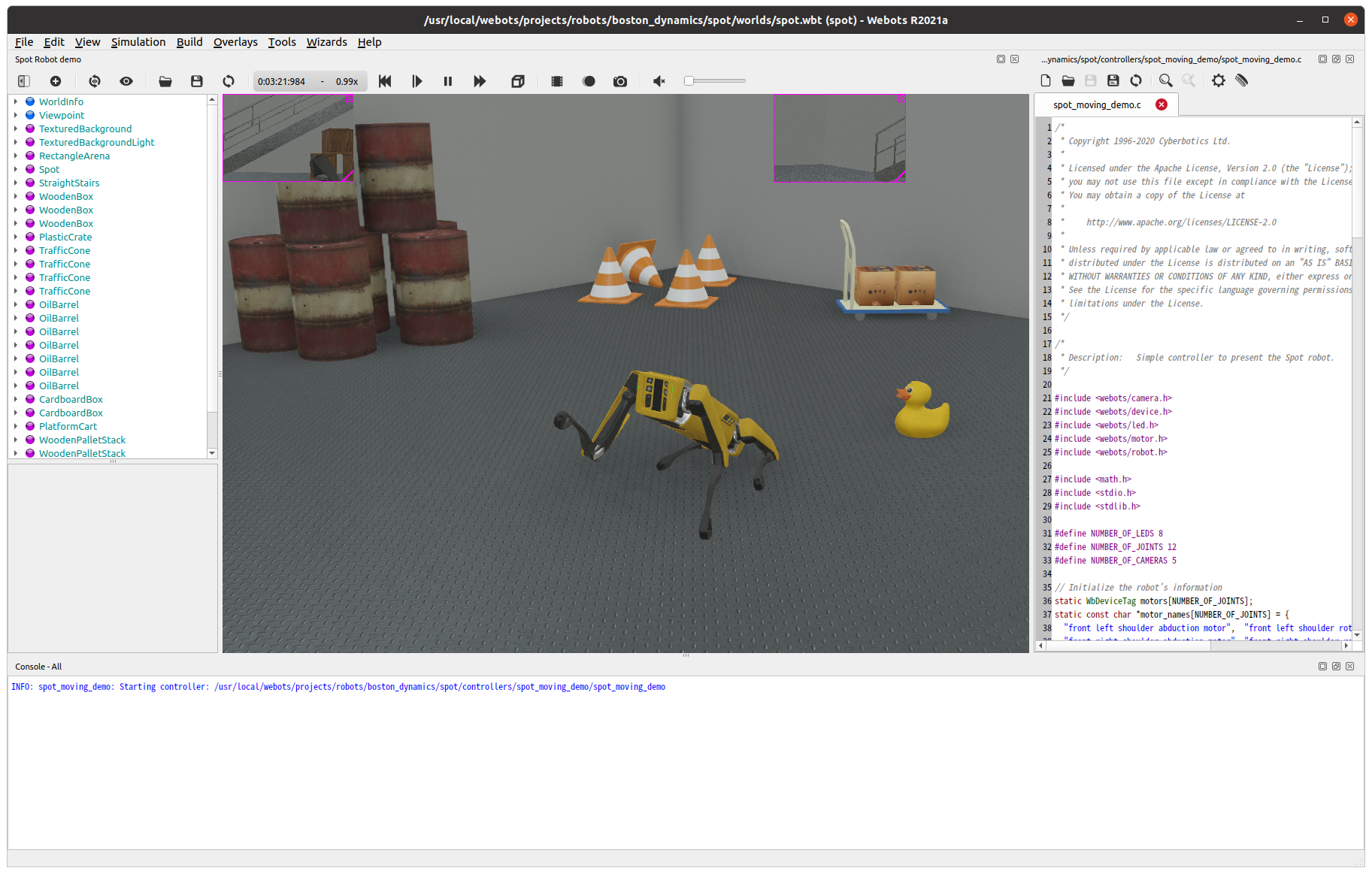
- ワールドのオープン。メニューの[File]→[Open Sample World]→[robots]にいろいろなロボットモデルが入ったワールドがある。例えば、[boston_dynamics]→[spot]→[spot.wbt]を開く。

- Boston DynamicsのSpotのデモを見ることができる。
ROS2との連携
- ROS2でWebotsを使うパッケージをインストールする。
- $ sudo apt install ros-foxy-webots-ros2
- デモの実行
- 次のロボットで産業用ロボットアームのデモを実行する。
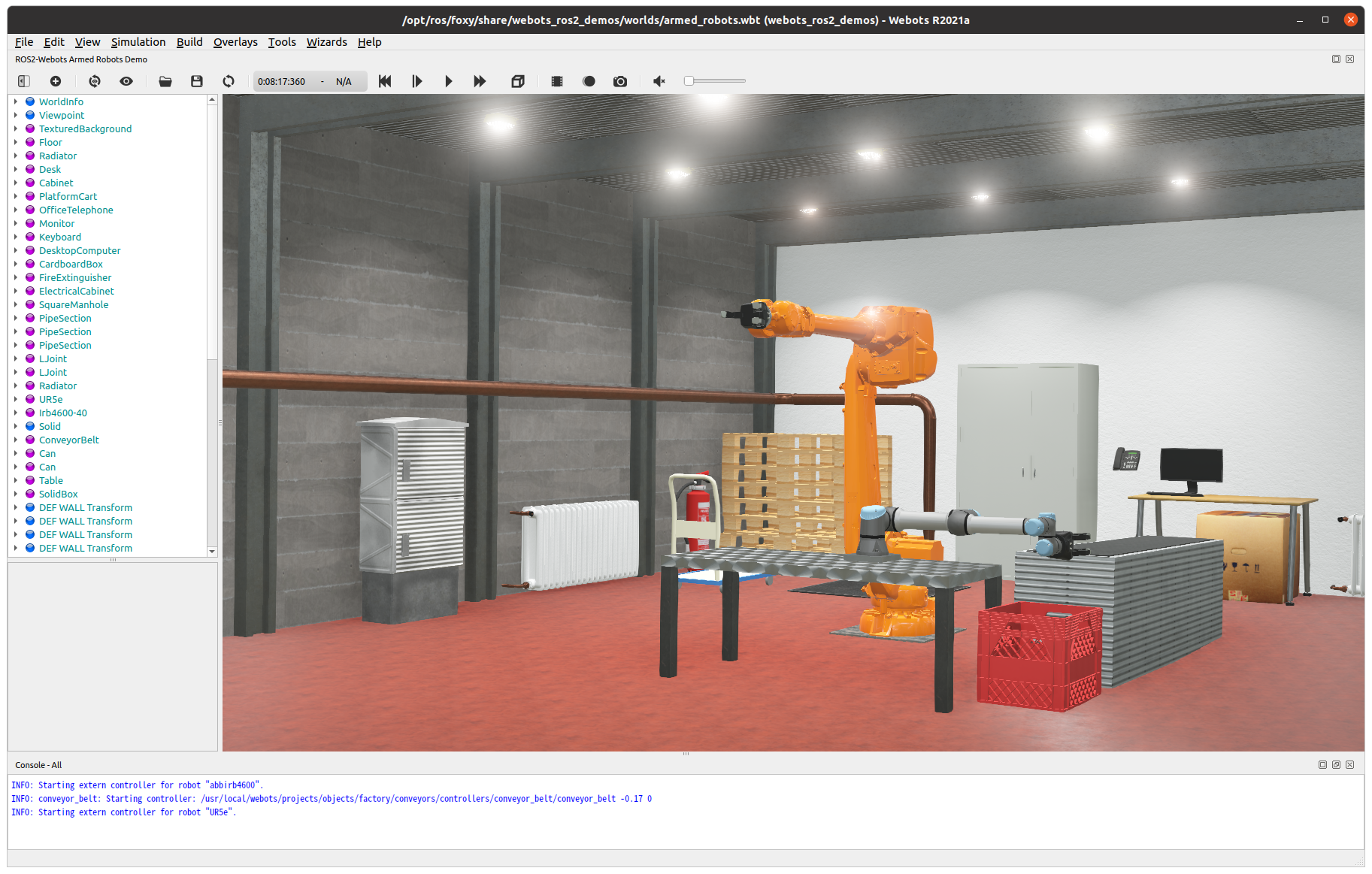
- $ ros2 launch webots_ros2_demos armed_robots.launch.py
- うまくいくとWebotsが開き、次のWebotsのROS2デモが実行される。
- 次のロボットで産業用ロボットアームのデモを実行する。
終わり
コメント