
 ROS演習6-2018:デッドレコニングを実装しよう! (2018-11-25) - .bashrcに以下を追加したらWSLのgazebo上でもturtulebot3が稀に動きますが安定していないので使えません。rvizを使ってください(2018-11-30) export GAZEBO_MASTER_U […]
ROS演習6-2018:デッドレコニングを実装しよう! (2018-11-25) - .bashrcに以下を追加したらWSLのgazebo上でもturtulebot3が稀に動きますが安定していないので使えません。rvizを使ってください(2018-11-30) export GAZEBO_MASTER_U […]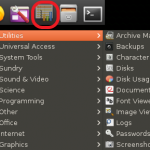 WSL: X Window環境を快適に! (2018-11-22) - WSL(Windows Subsystem for Linux)を今学期から講義で使い始めている。少し、苦労したが、思っていたより使えるのでX Window環境を整備する。 ディレクトリ名を日本語から英語に変換 $ su […]
WSL: X Window環境を快適に! (2018-11-22) - WSL(Windows Subsystem for Linux)を今学期から講義で使い始めている。少し、苦労したが、思っていたより使えるのでX Window環境を整備する。 ディレクトリ名を日本語から英語に変換 $ su […]WSL: Gazeboでロボットが動かないとき (2018-11-15) - 注:以下の方法で動く場合もありますが、動かなくなる場合が多いので解決になっていません(2018-12-01)。 WSL(Windows Subsystem for Linux)のUbuntuでROS演習の講義をしています […]
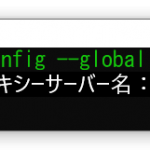 Proxyの設定 (2018-11-11) - WSL(Windows Subsystem for Linux)を講義で使用しているが、標準ではproxy切り替えのGUIツールがなく.bashrcの設定をいちいと書き直すのも手間がかかるのでスクリプトを作成した。pro […]
Proxyの設定 (2018-11-11) - WSL(Windows Subsystem for Linux)を講義で使用しているが、標準ではproxy切り替えのGUIツールがなく.bashrcの設定をいちいと書き直すのも手間がかかるのでスクリプトを作成した。pro […]WSL: RvizやGazeboが起動しない (2018-11-10) - WSL(Windows Subsystem for Linux)でXサーバーを立ち上げて問題なく、RvizとGazeboを使えていたがsudo apt upgradeや他のアプリケーションをインストールしているうちに g […]
WSL: エラーが出て起動しない (2018-11-10) - WSL(Windows Subsystem for Linux)を起動しようとして、下図のようにWslRegisterDistribution failed with errorというエラーが出た時の対処方法。 Wind […]
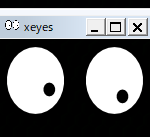 WSL: Xサーバーを自動起動しよう! (2018-11-10) - WSL(Windows Subsystem for Linux)にはXサーバーが含まれていないので、XサーバとしてVcXsrvかXmingを別途インストールしなければなりません。demura.netでは、VcXsrvのイ […]
WSL: Xサーバーを自動起動しよう! (2018-11-10) - WSL(Windows Subsystem for Linux)にはXサーバーが含まれていないので、XサーバとしてVcXsrvかXmingを別途インストールしなければなりません。demura.netでは、VcXsrvのイ […]ROS演習5-2018:サービスを使って双方向通信しようよ! (2018-11-6) - この記事は私が金沢工業大学ロボティクス学科で担当している2018年度後学期開講の講義ロボットプログラミングⅡ用です。今回はROSの通信のもう一つの通信方式であるサービスを理解しましょう。次のROS Wikiを参考にしてい […]
ROS演習4-2018: トピック通信しようよ! (2018-11-6) - この記事は私が金沢工業大学ロボティクス学科で担当している2018年度後学期開講の講義ロボットプログラミングⅡ用です。今回はROSの通信方式であるトピックを学びます。 1. Publisher キーボードからロボットを操縦 […]
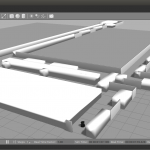
ROS演習3-2018:シミュレータでTurtlebot3を動かそう! (2018-11-1) - この記事は私が金沢工業大学ロボティクス学科で担当している2018年度後学期開講の講義ロボットプログラミングⅡ用です。シミュレータGAZEBOを使い、Turtlebot3を動かします。次のTurtleBot3 e-Manu […]
ROS演習2-2018:はじめてのROSプログラミング (2018-10-31) - この記事は私が金沢工業大学ロボティクス学科で担当している2018年度後学期開講の講義ロボットプログラミングⅡ用です。ROSでHellow Worldと表示するプログラムを作り、ビルドして実行してみましょう。この記事は以下 […]
 ROS演習1-2018: タートルで遊ぼう! (2018-10-31) - この記事は私が金沢工業大学ロボティクス学科で担当している2018年度後学期開講講義ロボットプログラミングⅡ用です。Windows Subsystem for Linux(WSL)にROSをインストールしたので、動作確認を […]
ROS演習1-2018: タートルで遊ぼう! (2018-10-31) - この記事は私が金沢工業大学ロボティクス学科で担当している2018年度後学期開講講義ロボットプログラミングⅡ用です。Windows Subsystem for Linux(WSL)にROSをインストールしたので、動作確認を […]ロボットプログラミングⅡ-2018:ROS Kineticのインストール (2018-10-20) - 私が担当している2018年度後学期開講の講義ロボットプログラミングⅡ用です.この記事はROS のオフィシャルウェブサイトの次の日本語記事を簡略化しています。詳しい説明は次のリンクをご覧ください。 ROS Kinetic […]
 YOLO V3: ROSで使う (darknet_ros) (2018-10-8) - YOLO V3をROSで使うためにコードを書こうと思ったが、すでにdarknet_rosがV3に対応している。darknet_rosのインストール、設定法と使い方のメモ。 参考サイト YOLO V3 for ROS: R […]
YOLO V3: ROSで使う (darknet_ros) (2018-10-8) - YOLO V3をROSで使うためにコードを書こうと思ったが、すでにdarknet_rosがV3に対応している。darknet_rosのインストール、設定法と使い方のメモ。 参考サイト YOLO V3 for ROS: R […]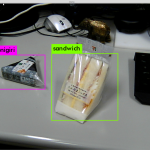 YOLO V3:オリジナルデータの学習 (2018-10-8) - YOLO V3にオリジナルデータを学習させたときのメモ。この記事はチェックができていないので、注意してください。 Yoloで学習させるためには以下のものを準備する。 1. 学習用データの準備 データ保存用のディレクトリ […]
YOLO V3:オリジナルデータの学習 (2018-10-8) - YOLO V3にオリジナルデータを学習させたときのメモ。この記事はチェックができていないので、注意してください。 Yoloで学習させるためには以下のものを準備する。 1. 学習用データの準備 データ保存用のディレクトリ […]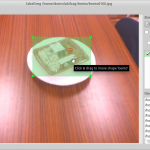 Yolo学習用データセットの作成ツール:labelImg (2018-10-7) - Yolo学習用データセットの作成法のメモ。Yoloの学習データを作成するときは、画像からオブジェクトの領域を矩形で指定する必要がある。そのためのツールとしては、BBox-Label-Toolがあるが、使いづらい上に、矩形 […]
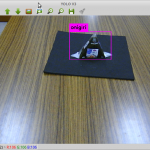
Yolo学習用データセットの作成ツール:labelImg (2018-10-7) - Yolo学習用データセットの作成法のメモ。Yoloの学習データを作成するときは、画像からオブジェクトの領域を矩形で指定する必要がある。そのためのツールとしては、BBox-Label-Toolがあるが、使いづらい上に、矩形 […] ROS Bagファイルから画像データの作成法 (2018-10-6) - ROS Bagファイルから画像データの作成法のメモ ターンテーブルにオブジェクトを載せ回転させる 使っているターンテーブルはアマゾンで購入したMr.ターンテーブル。これが良いかよくわからないが、速度を2段階で調整でき、い […]
ROS Bagファイルから画像データの作成法 (2018-10-6) - ROS Bagファイルから画像データの作成法のメモ ターンテーブルにオブジェクトを載せ回転させる 使っているターンテーブルはアマゾンで購入したMr.ターンテーブル。これが良いかよくわからないが、速度を2段階で調整でき、い […] ROS: Roomba 800 地図生成 (2018-10-1) - Roomba 800シリーズにHokuyo Lidar (UTM-30 LX)を積んでGmappingした時のメモ 1. 環 境 Ubuntu 16.04 ROS Kinetic 2.準 備 ルンバにPC、 […]
ROS: Roomba 800 地図生成 (2018-10-1) - Roomba 800シリーズにHokuyo Lidar (UTM-30 LX)を積んでGmappingした時のメモ 1. 環 境 Ubuntu 16.04 ROS Kinetic 2.準 備 ルンバにPC、 […]ROS: Roomba 800 インストールと設定 (2018-10-1) - Roomba 800シリーズにHokuyo Lidar(UTM-30 LX)を積んでROSで動かした時のメモ。Roomba 800でも動くパッケージはいくつかあるが、この記事ではcreate_autonomyを使用した。 […]
ロボットプログラミングⅡ-2018:開発環境のインストールと設定(Windows8用) (2018-9-28) - この記事は私が担当している講義ロボットプログラミングⅡ用で、Windows8が対象です。Windows10は以下のリンクに従ってインストール並びに設定をお願いします。 ロボットプログラミングⅡ-2018:開発環境WSLの […]
 ロボットプログラミングⅡ-2018:開発環境WSLのインストールと設定(Windows10用) (2018-9-24) - この記事は2018年度に私が担当している講義ロボットプログラミングⅡ用です。 ロボットプログラミングⅡでは、フレームワークとしてROSロボットシミュレータとしてGAZEBOを使用します。インストールは次の以下の手順です。 […]
ロボットプログラミングⅡ-2018:開発環境WSLのインストールと設定(Windows10用) (2018-9-24) - この記事は2018年度に私が担当している講義ロボットプログラミングⅡ用です。 ロボットプログラミングⅡでは、フレームワークとしてROSロボットシミュレータとしてGAZEBOを使用します。インストールは次の以下の手順です。 […] WSL: Windows Subsystem for Linuxのインストールと設定 (2018-9-24) - バージョンの確認 「スタートメニュー→歯車アイコン(設定)→システム→バージョン情報」を確認しWindowsの1709以上なら良い。バージョンが低い場合は「更新とセキュリティ」から更新する。 Windows Subsys […]
WSL: Windows Subsystem for Linuxのインストールと設定 (2018-9-24) - バージョンの確認 「スタートメニュー→歯車アイコン(設定)→システム→バージョン情報」を確認しWindowsの1709以上なら良い。バージョンが低い場合は「更新とセキュリティ」から更新する。 Windows Subsys […] WSL: WindowsからUbuntuのファイルへアクセス (2018-9-22) - \\wsl$でUbuntuにアクセスできるようになりました。この記事は古いです。 (Windows Subsystem for Linux)でWLSからWindowsのファイルへアクセスするのは、/mnt内を見ればよいの […]
WSL: WindowsからUbuntuのファイルへアクセス (2018-9-22) - \\wsl$でUbuntuにアクセスできるようになりました。この記事は古いです。 (Windows Subsystem for Linux)でWLSからWindowsのファイルへアクセスするのは、/mnt内を見ればよいの […]Razer Blade 15: OpenRazerでLinuxでも光輝くキーボード (2018-9-18) - LinuxでRazerのデバイスドライバを提供するOpenRazerで最新のRazer Blade 15が対応しました。これでLinuxでもハッピーになれます。 環境 Razer Blade 16 Voyager 16. […]
 Razer Blade 15にVoyager Linuxを入れ仕事で快適に使おう! (2018-9-9) - 現時点では、15インチのゲーミングノートPCでは世界最小といわれているRazer Blade 15 にLinuxのおしゃれなディストリビューションVoyagerを入れ、仕事で快適に使うために試行錯誤したときのメモ。BIO […]
Razer Blade 15にVoyager Linuxを入れ仕事で快適に使おう! (2018-9-9) - 現時点では、15インチのゲーミングノートPCでは世界最小といわれているRazer Blade 15 にLinuxのおしゃれなディストリビューションVoyagerを入れ、仕事で快適に使うために試行錯誤したときのメモ。BIO […]Voyager Linux: 画面に横線が入る (2018-9-8) - Voyager Linux 16.04で、画面下方に上画像のような横線が入る時の対処方法。 [設定]->[ウィンドウマネジャー(詳細)]を選択すると、上画像にある[ウィンドウマネジャー(詳細)]のウインドウが開く [コン […]
Voyager: Razer Blade15にお似合い!?おしゃれなフレンチLinuxディストリビューション (2018-8-27) - 仕事ではXubuntu16.04を使っている。Xfceが軽くて快適であるが、個人的に使うにはデザインが平凡でRazer Blade15に似合わない。いろいろ、探すとフランス製のVoyagerがXubuntuベースでデザイ […]
ubuntuでonedriveを使用 (2018-8-18) - 今まで、自分のPCではLinuxとWindowsを両方とも使わなければならないのでデュアルブートをしていた。デュアルブートでは2つのOSを同時に使うことはできないし、ハードディスクの使用も無駄があるので、試験的にubun […]
RealSense D435をROSで使う (2018-8-14) - RealSense D435をROSで使うメモ。RealSense SDKはaptでインストールできるのでとても簡単だった。ROSのラッパーもすでに提供されているのですぐ使える。このメモはカラー画像の表示まで。 環 境 […]
Razer Blade 15 環境設定メモ (Xubuntu16.04.2, Cuda9.2) (2018-8-10) - 現時点では、15インチのゲーミングノートPCでは世界最小といわれているRazer Blade 15 にxubuntu16.04.2, Cuda9.2をインストールしたときのメモ。Alienware 15と比較すると非常 […]
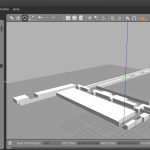
 UR5をGazeboで動かす (2018-7-28) - UR5+Robotiq GripperをGazeboで動作させたときのメモ。https://bundle-archive.plex.tv/utecrobotics/ur5を参考にした。 ROS バージョン: Kineti […]
UR5をGazeboで動かす (2018-7-28) - UR5+Robotiq GripperをGazeboで動作させたときのメモ。https://bundle-archive.plex.tv/utecrobotics/ur5を参考にした。 ROS バージョン: Kineti […]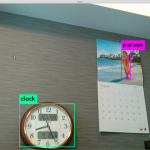 YOLO V3 インストールメモ (2018-7-16) - Alienware 15が修理から戻ってきたので、再インストールしたときのメモ。 上の例では、処理時間がV2が18.9[ms]、V3が22.7[ms]と多少遅くなっているが、予測確率が80%台から90%台と10%近く向上 […]
YOLO V3 インストールメモ (2018-7-16) - Alienware 15が修理から戻ってきたので、再インストールしたときのメモ。 上の例では、処理時間がV2が18.9[ms]、V3が22.7[ms]と多少遅くなっているが、予測確率が80%台から90%台と10%近く向上 […]Deep Learning用Alienware 15 環境設定メモ (Xubuntu16.04.2, Cuda9.2) (2018-7-16) - Deep Learning用に購入したAlienware 15 R4にxubuntu16.04.2, Cuda9.2をインストールしたときのメモ。RoboCup@Home Domestic Standard Platfo […]
VOC xmlファイルをYOLO annotaitonファイルへ変換 (2018-6-13) - VOC xmlファイルをYOLO annotationファイルへ変換する方法は以下を参照。 convert2Yolo 準備 cd ~/src git clone https://github.com/SsaRu/conv […]
Ubuntu16.04: RealSense R200を使う (2018-6-12) - RealSense R200をUbuntu16.04toROS Kineticで使った時のインストールメモ。IntelRealSenseのGithubのとおり行ったらエラーが出てハマった。ROS Wikiのとおり実施した […]
 ロボット知能工学特論 演習1 (2018-6-12) - この記事は私が担当している講義ロボット知能工学特論用です。ウェイポイントナビゲーションのプログラムを作りましょう。なお、この世界モデルを使って、MCLを実装していきます。 以下のチュートリアルも参考にしてください。 Se […]
ロボット知能工学特論 演習1 (2018-6-12) - この記事は私が担当している講義ロボット知能工学特論用です。ウェイポイントナビゲーションのプログラムを作りましょう。なお、この世界モデルを使って、MCLを実装していきます。 以下のチュートリアルも参考にしてください。 Se […]Deep Learning Hackathon (2018-6-11) - Deep Learning Hackathon in DemuLab Hands on カメラの起動 (Start up camera) $ roscore $ roslaunch usb_cam usb_cam-tes […]
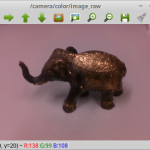 RealSense D435をROSで使う (2018-6-9) - RealSense D435をROSで使うメモ。RealSense SDKはapt-getでインストールできるのでとても簡単。ROSのラッパーもすでに提供されているのですぐ使える。このメモはカラー画像の表示まで。 ソフト […]
RealSense D435をROSで使う (2018-6-9) - RealSense D435をROSで使うメモ。RealSense SDKはapt-getでインストールできるのでとても簡単。ROSのラッパーもすでに提供されているのですぐ使える。このメモはカラー画像の表示まで。 ソフト […]YOLO V2: オリジナルデータの学習 (2018-6-8) - YOLO V2にオリジナルデータを学習させたときのメモ。この記事はチェックが十分にできていないので、注意してください。 Yoloで学習させるためには以下のものを準備する。 1. 学習用データの準備 データ保存用のディレ […]
 Ubuntu16.04: OpenCV3.4.0のインストール (2018-5-26) - Ubuntu16.04にOpenCV3.4.0をソースからビルドしインストールしたときのメモ。OpenCV3.4.1がすでにリリースされており、ソースからビルドでき、サンプルプログラムは問題なく動いた。ただし、Yolo […]
Ubuntu16.04: OpenCV3.4.0のインストール (2018-5-26) - Ubuntu16.04にOpenCV3.4.0をソースからビルドしインストールしたときのメモ。OpenCV3.4.1がすでにリリースされており、ソースからビルドでき、サンプルプログラムは問題なく動いた。ただし、Yolo […]OpenKiosk: 無人情報端末化 (2018-5-7) - キオスク端末とは公共の場などに置かれた無人の情報端末のことで、OpenKioskはWindows、Linux、OSXなどでキオスク端末を実現するオープンソースのソフトウェアです。授業ではオンラインテストに使います。 イン […]
RoboCup Japan Open 2017: KIT Happy Robot 3位入賞! (2018-5-6) - ロボカップジャパンオープン2017大垣が終了しました。夢考房RoboCup@Homeプロジェクトとロボティクス学科出村研究室の合同チームKIT Happy Robotはオープンプラットフォームリーグ(OPL)で3位入賞し […]
YOLO V3に変身!? (2018-4-14) - TEDにも登場したリアルタイム物体検出DNN(Deep Neural Network)のYOLOがVersion 3にバージョンアップしYOLO V3に変身したので試したときのメモ。仮面ライダーみたいに大幅にバージョンア […]
コンピュータ工学Ⅰ (2018-4-3) - 第1までに以下のホームワークをやってこよう! 次のソフトウェアを次週までにインストールしよう。 開発環境のインストール 次のソフトウェアをダウンロードして解凍しよう。 gtypist(学内のみインストール可) 以上
 Turtlebot3: 4. 動かそう! (2018-4-1) - では、Turtlebot3を動かしてみよう! 以下のリモートPC、Raspberry Pi3、OpenCRの設定が終わっているものとします。 Turtlebot3: リモートPCの設定 Turtlebot3: Raspb […]
Turtlebot3: 4. 動かそう! (2018-4-1) - では、Turtlebot3を動かしてみよう! 以下のリモートPC、Raspberry Pi3、OpenCRの設定が終わっているものとします。 Turtlebot3: リモートPCの設定 Turtlebot3: Raspb […]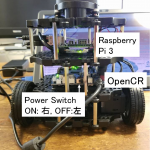 Turtlebot3: 3. OpenCRの設定 (2018-4-1) - Turtleobot3に搭載されているコントローラOpenCR1.0の設定メモ。このコントローラはオープンハードウェア&ソフトウェアで、ROSを使った組み込み向けに作られており、開発環境はArduino、Scratchか […]
Turtlebot3: 3. OpenCRの設定 (2018-4-1) - Turtleobot3に搭載されているコントローラOpenCR1.0の設定メモ。このコントローラはオープンハードウェア&ソフトウェアで、ROSを使った組み込み向けに作られており、開発環境はArduino、Scratchか […]Turtlebot3: 2. Raspberry Pi 3の設定 (2018-4-1) - Turtlebot3 Burgerに搭載されているRaspberry Pi 3の設定メモ。以下のリンクを元に作業したメモ。この作業も1.2GB以上のファイルをダウンロードする必要があるので、環境によっては数時間かかる。 […]
Turtlebot3: 1. リモートPCの設定 (2018-4-1) - Turtlebot3を動かすためのリモートPCの設定メモ。RobotisからEマニュアルが出ているが、日本語訳がなくわかりづらいのでメモを残す。 Turtlebot3 e-Manual, ROBOTIS Turtleb […]
Turtlebot3: チュートリアルというか防備録。 (2018-4-1) - ROBOTISのe-Manualをベースにしたチュートリアルというか防備録。 リモートPCの設定 Raspberry Pi3の設定 OpenCRの設定 動かそう! 続く…
PCL: VFH Descriptorを使ったソースコードでsegmentation fault (2018-3-26) - VHF (Viewpoint Feature Histogram) descriptorsを使ったvfh_recognition_node.cppでsegmentation faultのエラーを解決するために数日悩んだの […]