Deep Learning Hackathon in DemuLab
- Hands on
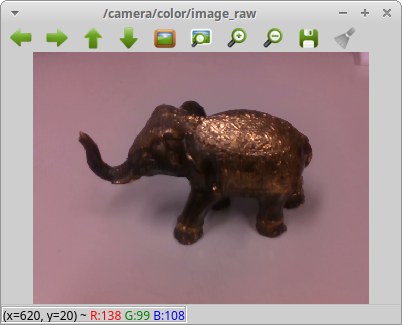
- カメラの起動 (Start up camera)
- $ roscore
- $ roslaunch usb_cam usb_cam-test.launch
- usb_camがない場合は次のコマンドでインストールする。
- $ sudo apt install ros-kinetic-usb-cam
- データの記録 (Record data)
- $ rosbag record -a
- ROS Bagデータから画像データの作成 (Extract image files form ROS bag)
$ rosrun image_view extract_images _sec_per_frame:=0.05 _filename_format:=image%04d.jpg image:=/usb_cam/image_raw- $ rosbag play bagfile_name
- 学習用データの作成 (Making data for Yolo)
- オリジナルデータの学習 (Yolo learning using original data)
- カメラの起動 (Start up camera)
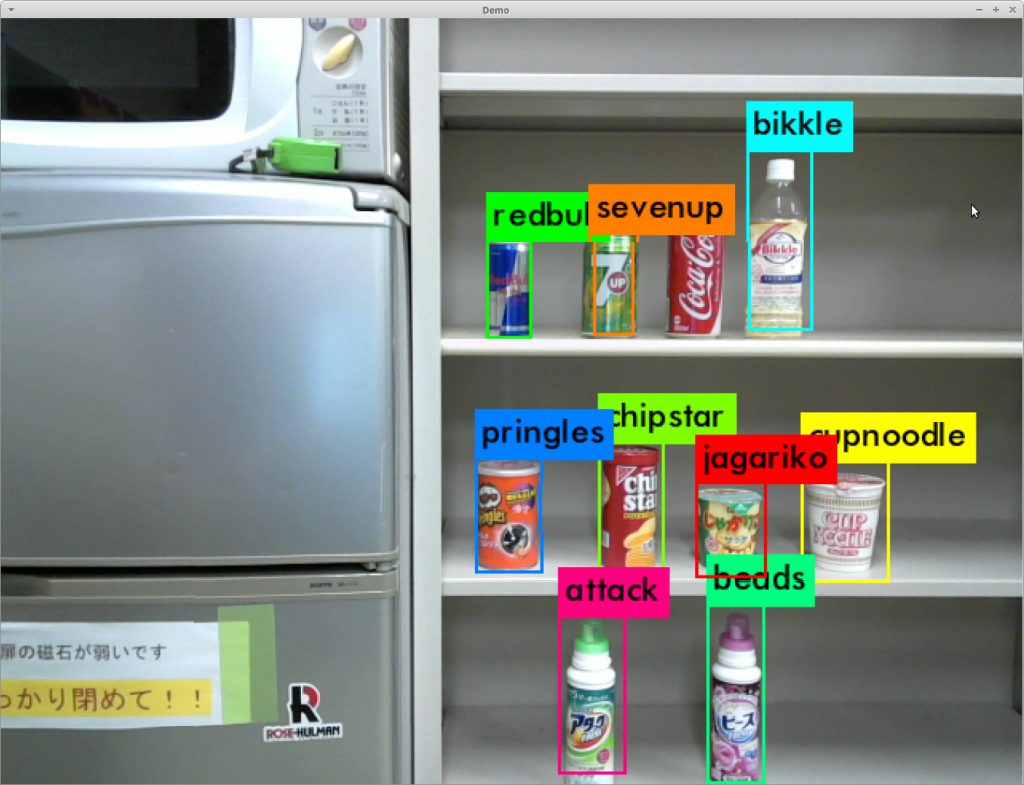
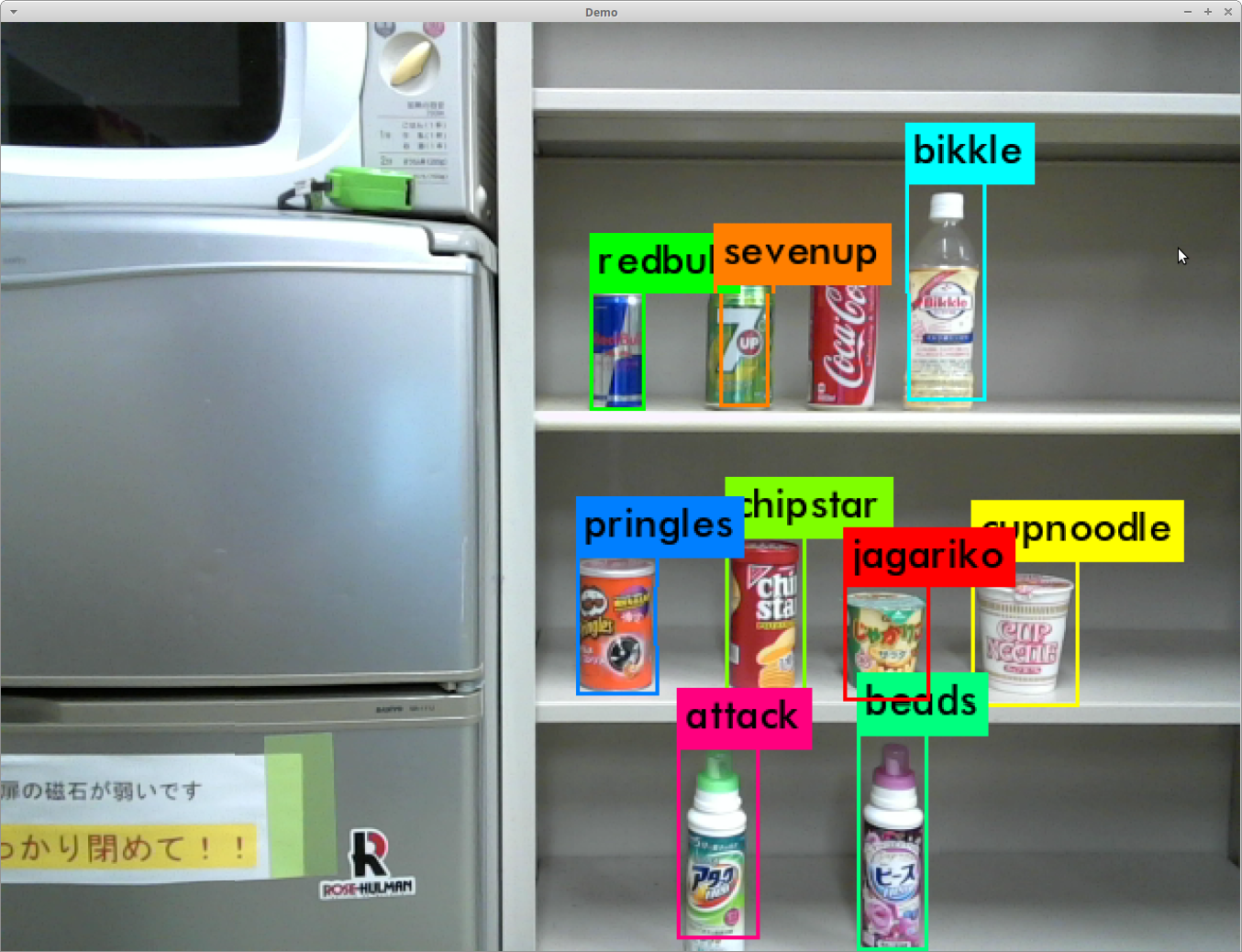
- Object recognition contest
- RoboCup@Home2018 Rule Book
- Storing Groceries P68
- Objects
-
No. Name Category 1 Doritos Snack 2 Pringles 3 Potato Chips 4 Lays 5 Milk Tea Drink 6 Pepsi 7 Apple Juice 8 Dr. Pepper 9 Cup Noodle Food 10 Meal Block 11 Sandwich 12 Lemon Fruit 13 Avocado 14 Paprika 15 Cascade Pod Cleaning Stuff 16 Spoon Cutlery 17 Fork 18 Cup Container 19 Bowl 20 Dish
- RoboCup@Home2018 Rule Book

コメント