RealSense D435をROSで使うメモ。RealSense SDKはapt-getでインストールできるのでとても簡単。ROSのラッパーもすでに提供されているのですぐ使える。このメモはカラー画像の表示まで。
ソフトウェア環境
- Ubuntu16.04
- ROS Kinetic
- RealSense SDK 2.0: (Build 2.12.0)
- ROS Wrapper: build 2.0.3
RealSense SDKのインストール
- このページのとおり実施すればよい。以下の手順はその簡単な日本語訳。
- リポジトリにIntelサーバーを追加
- echo ‘deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main’ | sudo tee /etc/apt/sources.list.d/realsense-public.list
- サーバーの公開鍵を登録
- sudo apt-key adv –keyserver keys.gnupg.net –sudo apt-get install librealsense2-dbgrecv-key 6F3EFCDE
- リポジトリのリストと使えるパッケージをリフレッシュする
- sudo apt-get update
- デモを実行できるようにインストールする
- sudo apt-get install librealsense2-dkms
- sudo apt-get install librealsense2-utils
- 開発用に追加のパッケージをインストールする
- sudo apt-get install librealsense2-dev
- sudo apt-get install librealsense2-dbg
- リブートする
- reboot
- リブートしたらカーネルがアップデートしているか確認する
- 次のコマンドを実行してrealsenseの文字列があれば成功
- modinfo uvcvideo | grep “version:”
ROSラッパーのインストール
- https://github.com/intel-ros/realsense/releases からSource code (realsense-2.0.2.tar.gz)を~/catkin_ws/srcにダウンロードする
- cd ~/catkin_ws/src
- tar xvzf realsense-2.0.3.tar.gz
- cd ~/catkin_ws
- catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
- usr/lib/libusb.aがないと怒られたら、次のコマンドを実施する。
- sudo apt install libusb-dev
- usr/lib/libusb.aがないと怒られたら、次のコマンドを実施する。
- catkin_make install
実行
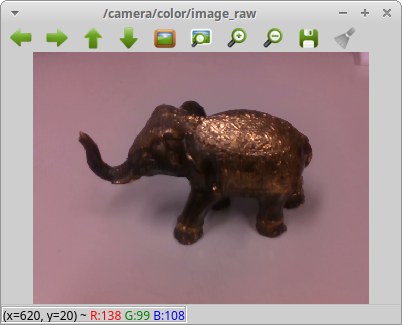
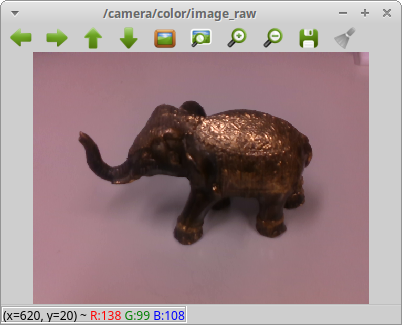
roslaunch realsense2_camera rs_camera.launch- 解像度は640×480 pixel。変更したいときはrs_camera.launchの中を書き換える。
rosrun image_view image_view image:=/camera/color/image_raw- 画像が表示されれば成功。
トピック
$ ~/catkin_ws/src/realsense-2.0.2/realsense_ros_camera/launch$ rostopic list
/camera/color/camera_info
/camera/color/image_raw
/camera/color/image_raw/compressed
/camera/color/image_raw/compressed/parameter_descriptions
/camera/color/image_raw/compressed/parameter_updates
/camera/color/image_raw/compressedDepth
/camera/color/image_raw/compressedDepth/parameter_descriptions
/camera/color/image_raw/compressedDepth/parameter_updates
/camera/color/image_raw/theora
/camera/color/image_raw/theora/parameter_descriptions
/camera/color/image_raw/theora/parameter_updates
/camera/depth/camera_info
/camera/depth/image_rect_raw
/camera/depth/image_rect_raw/compressed
/camera/depth/image_rect_raw/compressed/parameter_descriptions
/camera/depth/image_rect_raw/compressed/parameter_updates
/camera/depth/image_rect_raw/compressedDepth
/camera/depth/image_rect_raw/compressedDepth/parameter_descriptions
/camera/depth/image_rect_raw/compressedDepth/parameter_updates
/camera/depth/image_rect_raw/theora
/camera/depth/image_rect_raw/theora/parameter_descriptions
/camera/depth/image_rect_raw/theora/parameter_updates
/camera/extrinsics/depth_to_color
/camera/extrinsics/depth_to_infra1
/camera/extrinsics/depth_to_infra2
/camera/infra1/camera_info
/camera/infra1/image_rect_raw
/camera/infra1/image_rect_raw/compressed
/camera/infra1/image_rect_raw/compressed/parameter_descriptions
/camera/infra1/image_rect_raw/compressed/parameter_updates
/camera/infra1/image_rect_raw/compressedDepth
/camera/infra1/image_rect_raw/compressedDepth/parameter_descriptions
/camera/infra1/image_rect_raw/compressedDepth/parameter_updates
/camera/infra1/image_rect_raw/theora
/camera/infra1/image_rect_raw/theora/parameter_descriptions
/camera/infra1/image_rect_raw/theora/parameter_updates
/camera/infra2/camera_info
/camera/infra2/image_rect_raw
/camera/infra2/image_rect_raw/compressed
/camera/infra2/image_rect_raw/compressed/parameter_descriptions
/camera/infra2/image_rect_raw/compressed/parameter_updates
/camera/infra2/image_rect_raw/compressedDepth
/camera/infra2/image_rect_raw/compressedDepth/parameter_descriptions
/camera/infra2/image_rect_raw/compressedDepth/parameter_updates
/camera/infra2/image_rect_raw/theora
/camera/infra2/image_rect_raw/theora/parameter_descriptions
/camera/infra2/image_rect_raw/theora/parameter_updates
/camera/realsense_ros_camera_manager/bond
/camera/realsense_ros_camera_manager/parameter_descriptions
/camera/realsense_ros_camera_manager/parameter_updates
/rosout
/rosout_agg
/tf_static
以上

コメント