Turtleobot3に搭載されているコントローラOpenCR1.0の設定メモ。このコントローラはオープンハードウェア&ソフトウェアで、ROSを使った組み込み向けに作られており、開発環境はArduino、Scratchからプロ向けまである。なお、OpenCRのマイクロコントローラは32ビットARM Corte-M7ベースのSTM32F746ZGT6を使っており、3軸ジャイロ、3軸加速度、3軸の地磁気センサを搭載している。詳細は以下のe-Manualを参照。
ファームウェアのアップロード(Raspberry Pi3での作業)
- 以下の作業はTurtebot3 Burgerに搭載されているRaspb erry Pi3で実施する。リモートPCでも実施可能。
- アップロードはシェルスクリプトを使う方法とArduino IDEを使う2つの方法がある。ファイヤーウォールに守られている本学の環境だとArduino IDEを使う方法は必要なファイルをダウンロードできず作業を失敗ので、シェルスクリプトを使う方法を紹介する。Arduino IDEを使う方法はここを参照。
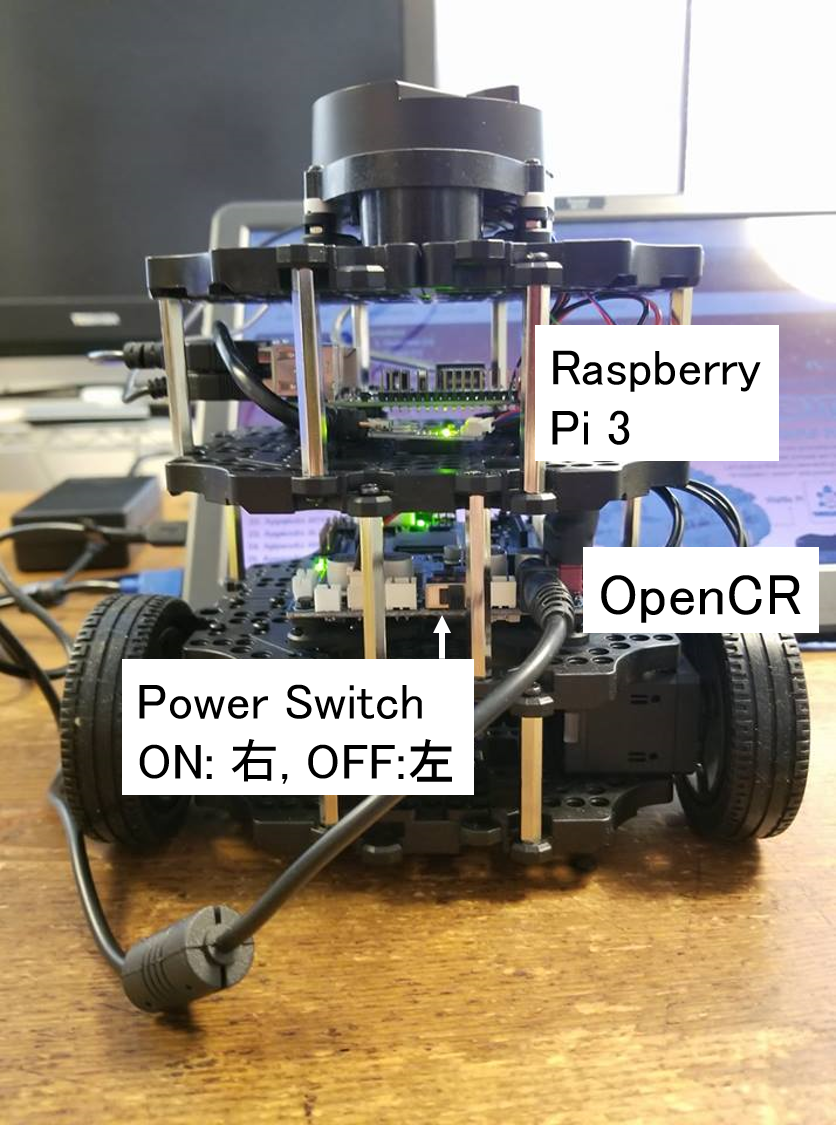
- まず、Raspberry Pi 3にディスプレイ、キーボード、マウスを接続し、OpenCRに電源にACアダプタから給電し、OpenCRのスライドスイッチを入れる(正面から見て右に移動するとON、左はOFF)。
- 端末を開き、次のコマンドを実行する。
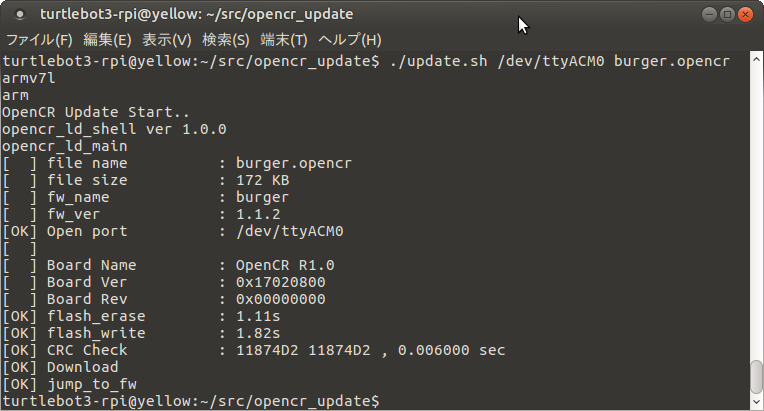
export OPENCR_PORT=/dev/ttyACM0export OPENCR_MODEL=burgercd ~/srccd srcwget https://github.com/ROBOTIS-GIT/OpenCR/raw/develop/arduino/opencr_release/shell_update/opencr_update.tar.bz2tar -xvf opencr_update.tar.bz2cd ./opencr_update./update.sh /dev/ttyACM0 burger.opencr- 下図のようにjump_to_fwがOKになっていれば成功。なお、2018年4月1日に実行したところ、ファームウェアバージョンは1.1.2。Arudino IDEを使う方法だとファームウェアのバージョンを簡単に変更できる。
終わり。







 Users Today : 36
Users Today : 36 Users Last 30 days : 830
Users Last 30 days : 830 Users This Year : 830
Users This Year : 830 Total Users : 8722481
Total Users : 8722481 Views Today : 36
Views Today : 36 Who's Online : 0
Who's Online : 0
コメント