
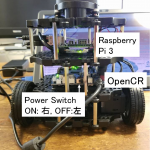
では、Turtlebot3を動かしてみよう! 以下のリモートPC、Raspberry Pi3、OpenCRの設定が終わっているものとします。
1. リモートPC
- 端末を開き、以下のコマンドを実行する。
- roscore
2. Raspberry Pi3 (Turtlebot 3)
- 端末を開き、次のコマンドを実行する。
- sudo apt install ros-kinetic-turtlebot3-teleop
- roslaunch turtlebot3_bringup turtlebot3_robot.launch
- roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
- 以下のコマンドでTurtlebotを操作できるので思いっきり楽しもう!
- w/x: 加速/ 減速 並進速度
- a/d:加速/ 減速 角速度
- スペースキー, s: 停止
- 以下のコマンドでTurtlebotを操作できるので思いっきり楽しもう!

- Playstation3 コントローラによるテレオペ
- 次のサイトのSetup for Jessie and Jessie Liteのとおりで動く。
- 簡単に設定をまとめると次のとおり。
- sudo apt-get -y install libusb-dev joystick python-pygame
- cd src
- wget http://www.pabr.org/sixlinux/sixpair.c
gcc -o sixpair sixpair.c -lusb - PS3コントローラをRaspberry Pi3にUSBケーブルで接続する。
- リブートする。
- sudo reboot
- cd ~/sec
- sudo sixpair
- コントローラのUSBケーブルを外す
- sudo bluetoothctl
- discoverable on
- agent on
- コントローラのPSボタンを押すとデバイス番号が端末に表示される。例えば、00:06:F7:67:4A:35。
- connect デバイス番号。デバイス番号が00:06:F7:67:4A:35の場合は次のコマンドになる。
- connect 00:06:F7:67:4A:35
- 問題がなければtrust デバイス番号。
- connect 00:06:F7:67:4A:35
- succeededと表示されればOK
- quit
- sudo reboot
- ノードを起動
- roslaunch turtlebot3_bringup turtlebot3_robot.launch
- PS3コントローラのUSB端子側に4個のLEDがあり赤く点灯している番号-1がデバイス番号。例えば、2が赤く点灯していると/dev/input/js1になる。デバイス番号のデフォルトがjs0なので1以外の場合は以下のようjoy_devパラメータを指定してコマンドを実行する。
- roslaunch teleop_twist_joy teleop.launch joy_dev:=/dev/input/js1
- コントローラの1番ボタンを押しながら、左側のジョイスティックを倒すとロボットが移動する。
終わり






 Users Today : 36
Users Today : 36 Users Last 30 days : 830
Users Last 30 days : 830 Users This Year : 830
Users This Year : 830 Total Users : 8722481
Total Users : 8722481 Views Today : 36
Views Today : 36 Who's Online : 0
Who's Online : 0
コメント