Turtlebot3を動かすためのリモートPCの設定メモ。RobotisからEマニュアルが出ているが、日本語訳がなくわかりづらいのでメモを残す。
Turtlebot3にはRaspberry Pi 3 model Bが搭載されているが、Turtlebot3 Burgerに同封されていたSDカードの容量が8GB、Raspberry Pi 3 model Bのメモリが1GBしかないのでリモートPCで多くの作業をすることになると思う。リモートPCはTurtlebot3から見た別PCで、ノートパソコンやデスクトップパソコンになる。Turtlebot3を自由に動かすために無線LAN環境が必要。Ubuntuのインストールから作業すると数GBのファイルをダウンロードする必要もあるので半日程度はかかる。
Ubuntu16.04のインストール
ROS KineticとTurtlebot3パッケージのインストール
- 端末を開き以下のコマンドを実行
sudo apt-get updatesudo apt-get upgradecdmkdir srccd srcwget https://raw.githubusercontent.com/ROBOTIS-GIT/robotis_tools/master/install_ros_kinetic.shchmod 755 ./install_ros_kinetic.sh./install_ros_kinetic.sh
- 再起動する
sudo reboot
- 依存パッケージのインストール
sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python ros-kinetic-rosserial-server ros-kinetic-rosserial-client ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-image-transport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation ros-kinetic-interactive-markerscd ~/catkin_ws/srcgit clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.gitgit clone https://github.com/ROBOTIS-GIT/turtlebot3.gitcd ~/catkin_wscatkin_make
ネットワーク設定
- 端末を開き、以下のコマンドでIPアドレスを調べる。リモートPCとTurtlebot3とは無線LANで通信するのでwlan0の欄を見る。ここでは192.168.1.11とする。
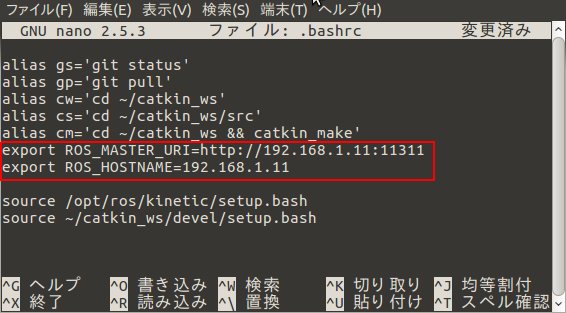
ifconfig- 下図の赤で囲んだ部分を.bashrcに追加する。ここのIPアドレスはifconfigで調べたIPアドレス。この例では192.168.1.11。
ROS_MASTER_URIとROS_HOSTNAMEは同じIPアドレスにする。ROS_MASTER_URIはroscoreを起動するリモートPCのIPアドレス。ROS_HOSTNAMEはリモートPCのIPアドレス。リモートPCの場合は両者は同じになる。IPアドレスを間違えるとロボットは動かない。
また、DHCP設定の場合はコンピュータを起動するたびにIPアドレスが変わるので注意が必要。
- 以下のコマンドで設定を反映させる。
source ~/.bashrc
リモートPCの設定終わり。お疲れ様。

コメント