
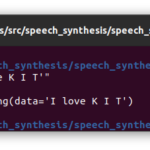
 ロボットプログラミングⅡ-2021:ROS2演習7-音声合成 (Python) (2021-11-18) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回も音声認識と同様にPythonライブラリをROS2化します。使用する音声合成ライブラリはgTTS(Google Te […]
ロボットプログラミングⅡ-2021:ROS2演習7-音声合成 (Python) (2021-11-18) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回も音声認識と同様にPythonライブラリをROS2化します。使用する音声合成ライブラリはgTTS(Google Te […]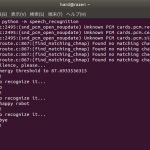 ロボットプログラミングⅡ-2021:ROS2演習6-音声認識 (Python) (2021-11-17) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. SpeechRecognitionというPythonの音声認識ライブラリはご存知でしょうか。CMU Sphinx、Goo […]
ロボットプログラミングⅡ-2021:ROS2演習6-音声認識 (Python) (2021-11-17) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. SpeechRecognitionというPythonの音声認識ライブラリはご存知でしょうか。CMU Sphinx、Goo […] ロボットプログラミングⅡ-2021:ROS2演習5-サービス通信しよう!(Python) (2021-11-4) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、ROS2のもう一つの通信方式であるサービスとそれをPythonで実現する方法を学びましょう! コンテンツ サービ […]
ロボットプログラミングⅡ-2021:ROS2演習5-サービス通信しよう!(Python) (2021-11-4) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、ROS2のもう一つの通信方式であるサービスとそれをPythonで実現する方法を学びましょう! コンテンツ サービ […] ロボットプログラミングⅡ-2021:ROS2演習4-トピック通信しよう!(Python) (2021-11-4) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、ROS2の通信方式であるトピックとそれをPythonで実現する方法を学びましょう!詳細なコンテンツは次のとおりで […]
ロボットプログラミングⅡ-2021:ROS2演習4-トピック通信しよう!(Python) (2021-11-4) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、ROS2の通信方式であるトピックとそれをPythonで実現する方法を学びましょう!詳細なコンテンツは次のとおりで […] ロボットプログラミングⅡ-2021:ROS2演習3b-GazeboシミュレータでCreate3を動かそう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. GazeboシミュレータでiRobot社のCreate3を動かしましょう!Create3はルンバでおなじみのiRobot […]
ロボットプログラミングⅡ-2021:ROS2演習3b-GazeboシミュレータでCreate3を動かそう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. GazeboシミュレータでiRobot社のCreate3を動かしましょう!Create3はルンバでおなじみのiRobot […] ロボットプログラミングⅡ-2021:ROS2演習3a-Webotsシミュレータでルンバを動かそう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. WebotsシミュレータでiRobot社のCreate2を動かしましょう!本記事ではカナダのSimon Fraser U […]
ロボットプログラミングⅡ-2021:ROS2演習3a-Webotsシミュレータでルンバを動かそう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. WebotsシミュレータでiRobot社のCreate2を動かしましょう!本記事ではカナダのSimon Fraser U […] ロボットプログラミングⅡ-2021:ROS2演習2-はじめてのROS2プログラミング(Python) (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 演習2では次の内容を学び,Pythonを使ったROS2プログラミングを体験します. 内 容 ワークスペース パッケージ […]
ロボットプログラミングⅡ-2021:ROS2演習2-はじめてのROS2プログラミング(Python) (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 演習2では次の内容を学び,Pythonを使ったROS2プログラミングを体験します. 内 容 ワークスペース パッケージ […]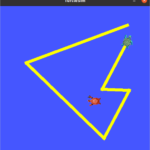 ロボットプログラミングⅡ-2021:ROS2演習1-亀で遊ぼう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. ROSの定番であるタートルシム(turtlesim)でROS2を体験してみましょう。なお、タートルは海亀のことでROSの […]
ロボットプログラミングⅡ-2021:ROS2演習1-亀で遊ぼう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. ROSの定番であるタートルシム(turtlesim)でROS2を体験してみましょう。なお、タートルは海亀のことでROSの […] 専門実験2021(ロボット制御):開発環境のインストール (2021-10-8) - 2021年度後学期 金沢工業大学 ロボティクス学科 専門実験(ロボット制御)では,授業中に配布するUbuntu20.04インストール済みのUSBメモリを使って実際のロボットで実習しますが,自宅でも課題等を行えるように各人 […]
専門実験2021(ロボット制御):開発環境のインストール (2021-10-8) - 2021年度後学期 金沢工業大学 ロボティクス学科 専門実験(ロボット制御)では,授業中に配布するUbuntu20.04インストール済みのUSBメモリを使って実際のロボットで実習しますが,自宅でも課題等を行えるように各人 […] 専門実験2021(ロボット制御):ROS NoeticとOpenMANIPULATOR-Xのインストール (2021-10-4) - ROS Noeticのインストール 上で作成したUSB Linuxでコンピュータをブートし,Ubuntuの端末を開いて,次のコマンドを実行する. $ sudo apt update && sudo apt […]
専門実験2021(ロボット制御):ROS NoeticとOpenMANIPULATOR-Xのインストール (2021-10-4) - ROS Noeticのインストール 上で作成したUSB Linuxでコンピュータをブートし,Ubuntuの端末を開いて,次のコマンドを実行する. $ sudo apt update && sudo apt […] USBメモリのクローン (2021-10-1) - USBメモリにUbuntuが丸ごと入っているUSB Linuxは便利ですが、USBメモリが壊れたり、小さいので紛失したりする場合に備える必要があります。USBメモリを丸ごとクローンする方法を紹介します。丸ごとクローンする […] 専門実験2021(ロボット制御):TAトレーニング (2021-10-1) - 専門実験2021(ロボット制御)のTAのトレーニングページです.以下のリンクの説明に従って取り組んでください.ほぼ,Robotis e-Manualのリンクを選別したものです.なお,写真では5セットですが,全部で10セッ […]
USBメモリのクローン (2021-10-1) - USBメモリにUbuntuが丸ごと入っているUSB Linuxは便利ですが、USBメモリが壊れたり、小さいので紛失したりする場合に備える必要があります。USBメモリを丸ごとクローンする方法を紹介します。丸ごとクローンする […] 専門実験2021(ロボット制御):TAトレーニング (2021-10-1) - 専門実験2021(ロボット制御)のTAのトレーニングページです.以下のリンクの説明に従って取り組んでください.ほぼ,Robotis e-Manualのリンクを選別したものです.なお,写真では5セットですが,全部で10セッ […] ロボットプログラミングⅡ-2021:Anaconda3のインストール(Windows) (2021-9-30) - Pythonに加えて機械学習やデータサイエンス関連のライブラリをたくさん含むAnacondaをインストールを紹介します.なお,Anacondaは商用利用の場合は有償です. ここでは,個人,学生,研究者向けのAnacond […]
ロボットプログラミングⅡ-2021:Anaconda3のインストール(Windows) (2021-9-30) - Pythonに加えて機械学習やデータサイエンス関連のライブラリをたくさん含むAnacondaをインストールを紹介します.なお,Anacondaは商用利用の場合は有償です. ここでは,個人,学生,研究者向けのAnacond […] ロボットプログラミングⅡ-2021:USB Linuxの作り方 (Ubuntu20.04) (2021-9-26) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今期の授業では,WSL2ではなくUSBメモリにUbuntu20.04をインストールします.これをUSB Linuxとよぶ […]
ロボットプログラミングⅡ-2021:USB Linuxの作り方 (Ubuntu20.04) (2021-9-26) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今期の授業では,WSL2ではなくUSBメモリにUbuntu20.04をインストールします.これをUSB Linuxとよぶ […] PD実践2021:プログラムのビルド・アップロード・実行 (2021-9-25) - 本記事は金沢工業大学ロボティクス学科2年次後学期PD実践の講義用です。 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして、 […]
PD実践2021:プログラムのビルド・アップロード・実行 (2021-9-25) - 本記事は金沢工業大学ロボティクス学科2年次後学期PD実践の講義用です。 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして、 […]PD実践2021:授業概要 (2021-9-25) - 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして、組込みプログラミングの基礎を楽しく学びます。 講義日:木曜日3,4限 […]
LEGO Mindstorms EV3 開発環境のインストール (v0.1) (2021-9-25) - 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして,組込みプログラミングの基礎を楽しく学びます.なお,ノートパソコンのOSは […]
 プログラミング言語2021:第1週授業まとめ (2021-9-24) - 金沢工業大学ロボティクス学科プログラミング言語の授業用ページです。 Moodleは10/1以降でないと利用できないので、必要な情報をここにまとめました。 講義資料 講義パワーポイント(学内のみダウンロード可 […]
プログラミング言語2021:第1週授業まとめ (2021-9-24) - 金沢工業大学ロボティクス学科プログラミング言語の授業用ページです。 Moodleは10/1以降でないと利用できないので、必要な情報をここにまとめました。 講義資料 講義パワーポイント(学内のみダウンロード可 […]PD実践2021:第1週 ガイダンス・開発環境のインストール (2021-9-23) - 1週目(9/25):ガイダンス・開発環境のインストール 担当教員、TA、SAの紹介(講義室) 授業の概要説明(講義室) 本資料の説明 ETロボコンの説明 PD実践:LEGO Mindstorms EV3 開発環境のインス […]
PD実践2021:TA/SAトレーニング (2021-9-23) - PD実践2021のTA/SAのトレーニングページです.以下のリンクの説明に従って取り組んでください.9/25(土,木曜日授業)は4番までは終えてください.5番は来週以降でもかまいません. LEGO Mindstorms […]
 PD実践2021:LEGO Digital Designerのインストール (2021-9-23) - 本記事では、KITロボティクス学科2021年度後学期PD実践で使用するLEGOブロックの3DシミュレータであるLEGO Digital Designerをインストール法を説明します。なお、KIT関係者しかファイルをダウン […]
PD実践2021:LEGO Digital Designerのインストール (2021-9-23) - 本記事では、KITロボティクス学科2021年度後学期PD実践で使用するLEGOブロックの3DシミュレータであるLEGO Digital Designerをインストール法を説明します。なお、KIT関係者しかファイルをダウン […]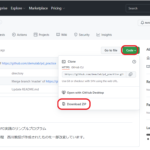 PD実践2021:サンプルプログラムのダウンロード (2021-9-23) - PD実践2021で使用するサンプルプログラムを次の手順でダウンロードしましょう. 次のURLにアクセスして,下図赤丸の[code]をクリックし,赤丸で示している[Download ZIP]をっクリックして,デスクトップに […]
PD実践2021:サンプルプログラムのダウンロード (2021-9-23) - PD実践2021で使用するサンプルプログラムを次の手順でダウンロードしましょう. 次のURLにアクセスして,下図赤丸の[code]をクリックし,赤丸で示している[Download ZIP]をっクリックして,デスクトップに […]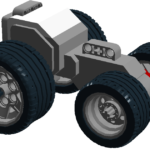
PD実践2021:ジャイロセンサの使い方 (2021-9-23) - ジャイロセンサの使い方を学びます。 API ポート4のジャイロセンサの角位置をリセットする。 ev3_gyro_sensor_reset(EV3_PORT_4); ポート4のジャイロセンサで角度[°]を測定する。 […]
PD実践2021:超音波センサの使い方 (2021-9-23) - 超音波センサの使い方を学びます。 API ポート3の超音波センサを初期化する。 ev3_sensor_config(EV3_PORT_3, ULTRASONIC_SENSOR); ポート3が超音波センサであることを設定 […]
 PD実践2021:カラーセンサの使い方 (2021-9-23) - カラーセンサの使い方を学びます。 API ポート2のカラーセンサを初期化 ev3_sensor_config(EV3_PORT_2, COLOR_SENSOR); ポート2がカラーセンサであることを設定 ポート2のカ […]
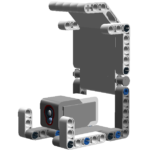
PD実践2021:カラーセンサの使い方 (2021-9-23) - カラーセンサの使い方を学びます。 API ポート2のカラーセンサを初期化 ev3_sensor_config(EV3_PORT_2, COLOR_SENSOR); ポート2がカラーセンサであることを設定 ポート2のカ […] PD実践2021:タッチセンサの組立て方と使い方 (2021-9-23) - タッチセンサの使い方を学びます。 API タッチセンサの状態を検出する。引数はセンサのポート番号。戻り値はタッチセンサが押された状態ならtrue、押されていない状態ならfalseを返す。 bool_t isPresse […]
PD実践2021:タッチセンサの組立て方と使い方 (2021-9-23) - タッチセンサの使い方を学びます。 API タッチセンサの状態を検出する。引数はセンサのポート番号。戻り値はタッチセンサが押された状態ならtrue、押されていない状態ならfalseを返す。 bool_t isPresse […] PD実践2021:サウンドの鳴らし方 (2021-9-23) - EV3でサウンドを鳴らす方法を学びます。 サウンドに関するAPI 440Hz(ラの音)で100ミリ秒鳴らす ev3_speaker_play_tone( 440, 100); 音量を1に設定する(0~100、0はミュ […]
PD実践2021:サウンドの鳴らし方 (2021-9-23) - EV3でサウンドを鳴らす方法を学びます。 サウンドに関するAPI 440Hz(ラの音)で100ミリ秒鳴らす ev3_speaker_play_tone( 440, 100); 音量を1に設定する(0~100、0はミュ […]PD実践2021:LCDの使い方 (2021-9-23) - EV3の画面に文字や絵を表示することができるLCDのAPIを学びます。 LCDに関するAPI デォルトのフォントを設定する。シミュレータは標準フォントのみ対応。 ER ev3_lcd_set_font (lcdfon […]
PD実践2021:EV3RTプログラミング演習(センサ) (2021-9-23) - PD実践2021ではLEGO Mindstorms EV3にリアルタイムOS TOPPERS/EV3RTを入れて,C言語でロボットプログラミングを学びます.まずは,センサの使い方とそのプログラミングを学びましょう. 演 […]
 プログラミング言語2021:gtypistのインストールと使い方 (2021-9-18) - プログラミング言語はタッチタイプのトレーニングにgtypistをロボティクス学科教員がカスタイズしたものを使います。タッチタイプはキーボードを見ないでキーを打つことです。欧米諸国では小学校でタッチタイプを学んでいて、日本 […]
プログラミング言語2021:gtypistのインストールと使い方 (2021-9-18) - プログラミング言語はタッチタイプのトレーニングにgtypistをロボティクス学科教員がカスタイズしたものを使います。タッチタイプはキーボードを見ないでキーを打つことです。欧米諸国では小学校でタッチタイプを学んでいて、日本 […] プログラミング言語2021:VS Code (VSCodium) の使い方 (2021-9-18) - この記事はKITロボティクス学科プログラミング言語用で、授業で配布したVSCodiumのポータブル環境用です。 では、さっそくVSCodiumを使ってみましょう。 起 動 デスクトップに作ったVSCodiumのショートカ […]
プログラミング言語2021:VS Code (VSCodium) の使い方 (2021-9-18) - この記事はKITロボティクス学科プログラミング言語用で、授業で配布したVSCodiumのポータブル環境用です。 では、さっそくVSCodiumを使ってみましょう。 起 動 デスクトップに作ったVSCodiumのショートカ […] プログラミング言語2021:VS Code (VSCodium)のインストール (2021-9-18) - この記事はKITロボティクス学科プログラミング言語の授業用です。 ロボティクス学科対象のプログラミング言語(出村担当)ではC言語のエディタとして今年度からVSCodiumを使います。VS CodiumはマイクロソフトのV […]
プログラミング言語2021:VS Code (VSCodium)のインストール (2021-9-18) - この記事はKITロボティクス学科プログラミング言語の授業用です。 ロボティクス学科対象のプログラミング言語(出村担当)ではC言語のエディタとして今年度からVSCodiumを使います。VS CodiumはマイクロソフトのV […] WRS2020 Juniorで夢考房RoboCup@Homeプロジェクトが準優勝 (2021-9-12) - WRS2020ジュニア競技カテゴリーホームロボットチャレンジ(リアルサイズ)に出場した金沢工業大学夢考房RoboCup@HomeプロジェクトKIT Happy Robotチームは2位でした.おめでとうござます! 1年生主 […]
WRS2020 Juniorで夢考房RoboCup@Homeプロジェクトが準優勝 (2021-9-12) - WRS2020ジュニア競技カテゴリーホームロボットチャレンジ(リアルサイズ)に出場した金沢工業大学夢考房RoboCup@HomeプロジェクトKIT Happy Robotチームは2位でした.おめでとうござます! 1年生主 […] Yumekobo JuniorチームがWRS2020でRobotics for Happiness賞を受賞! (2021-9-12) - WRS2020 Junior競技カテゴリーの ホームロボットチャレンジ(リアルサイズ)でYumekobo JuniorチームがRobotics for Happiness賞を受賞しました.おめでとうございます! なお,Y […]
Yumekobo JuniorチームがWRS2020でRobotics for Happiness賞を受賞! (2021-9-12) - WRS2020 Junior競技カテゴリーの ホームロボットチャレンジ(リアルサイズ)でYumekobo JuniorチームがRobotics for Happiness賞を受賞しました.おめでとうございます! なお,Y […] Happy RobotチームはWRSフューチャーコンビニエンスチャレンジの遠隔部門に参加します. (2021-9-10) - 金沢工業大学ロボティクス学科出村研究室のHappy Robotチームは経済産業所とNEDOが主催する国際ロボット競技会WRS2020フューチャーコンビニエンスストアチャレンジの遠隔部門に参加します. World Robo […]
Happy RobotチームはWRSフューチャーコンビニエンスチャレンジの遠隔部門に参加します. (2021-9-10) - 金沢工業大学ロボティクス学科出村研究室のHappy Robotチームは経済産業所とNEDOが主催する国際ロボット競技会WRS2020フューチャーコンビニエンスストアチャレンジの遠隔部門に参加します. World Robo […] 金沢工業大学、産学連携でロボットが操作する次世代スライド棚の共同研究を開始 (2021-9-9) - ICT教育ニュースにも出村研究室の取り組みが紹介されました. 金沢工業大学、産学連携でロボットが操作する次世代スライド棚の共同研究を開始金沢工業大学は7日、同大学ロボティクス学科が三協立山タテヤマアドバンス社と、近未来の […] 金沢工業大学ロボティクス学科と三協立山株式会社タテヤマアドバンス社が、ロボットが操作する次世代スライド棚の共同研究を開始。 (2021-9-7) - KITのウェブサイトで出村研究室の取り組みが紹介されました. 金沢工業大学ロボティクス学科と三協立山株式会社タテヤマアドバンス社が、ロボットが操作する次世代スライド棚の共同研究を開始。ロボット競技会World Robot […]
金沢工業大学、産学連携でロボットが操作する次世代スライド棚の共同研究を開始 (2021-9-9) - ICT教育ニュースにも出村研究室の取り組みが紹介されました. 金沢工業大学、産学連携でロボットが操作する次世代スライド棚の共同研究を開始金沢工業大学は7日、同大学ロボティクス学科が三協立山タテヤマアドバンス社と、近未来の […] 金沢工業大学ロボティクス学科と三協立山株式会社タテヤマアドバンス社が、ロボットが操作する次世代スライド棚の共同研究を開始。 (2021-9-7) - KITのウェブサイトで出村研究室の取り組みが紹介されました. 金沢工業大学ロボティクス学科と三協立山株式会社タテヤマアドバンス社が、ロボットが操作する次世代スライド棚の共同研究を開始。ロボット競技会World Robot […] Webots講座11:差動駆動型ロボットの作り方(C言語) (2021-7-23) - Webots講座9までは自動運転シミュレータを使い,予め作られたロボットカー(BMW X5)にプログラミングしてきました.Webots講座11からは自作ロボットの作り方を学んでいきましょう.本記事はレファレンスのWebo […]
Webots講座11:差動駆動型ロボットの作り方(C言語) (2021-7-23) - Webots講座9までは自動運転シミュレータを使い,予め作られたロボットカー(BMW X5)にプログラミングしてきました.Webots講座11からは自作ロボットの作り方を学んでいきましょう.本記事はレファレンスのWebo […] Webots講座10:C言語でプログラミングしよう! (2021-7-20) - Webots講座の10回目です.今までPythonを使っていましたが,C言語でプログラミングしてみましょう. レファレンス Webots User Guide (Cyberbotics, Inc.) 環 境 Window […]
Webots講座10:C言語でプログラミングしよう! (2021-7-20) - Webots講座の10回目です.今までPythonを使っていましたが,C言語でプログラミングしてみましょう. レファレンス Webots User Guide (Cyberbotics, Inc.) 環 境 Window […] 協働型ロボットSawyer:コンビニタスクのデモ (2021-7-20) - KIT夏のオープンキャンパスが2021年7月17,18日に開催されました.ロボティクス学科出村研究室ブースではRethink Robotics社の協働型ロボットSawyerを使ったコンビニタスクのデモを実施しました.その […]
協働型ロボットSawyer:コンビニタスクのデモ (2021-7-20) - KIT夏のオープンキャンパスが2021年7月17,18日に開催されました.ロボティクス学科出村研究室ブースではRethink Robotics社の協働型ロボットSawyerを使ったコンビニタスクのデモを実施しました.その […] Webots 2021bにバージョンアップ (2021-7-19) - Webotsが約7か月ぶりに2021bにバージョンアップしました.結構変わっているので開発が盛んなんですね.詳細は次のリンクをご覧ください.なお,上の図は新しく追加されたNVIDIAのJetbot. https://cy […]
Webots 2021bにバージョンアップ (2021-7-19) - Webotsが約7か月ぶりに2021bにバージョンアップしました.結構変わっているので開発が盛んなんですね.詳細は次のリンクをご覧ください.なお,上の図は新しく追加されたNVIDIAのJetbot. https://cy […] Webots講座9:PROTOファイル(アッカーマン・ビークル) (2021-7-16) - Webots講座の9回目です.Webots講座4:自分の位置を知ろう(Python)でデッドレコニングを実装するハンズオンがありました.デッドレコニングを実装するには,そのロボットのホイールベースなどのパラメータがわらな […]
Webots講座9:PROTOファイル(アッカーマン・ビークル) (2021-7-16) - Webots講座の9回目です.Webots講座4:自分の位置を知ろう(Python)でデッドレコニングを実装するハンズオンがありました.デッドレコニングを実装するには,そのロボットのホイールベースなどのパラメータがわらな […] KITオープンキャンパス:協働型ロボットSawyerによるデモ (2021-7-14) - 7/17(土),18(日)にKITオープンキャンパスが開催されます.ロボティクス学科のブースでは出村研究室が協働型ロボットSawyerを使い未来のコンビニをテーマとしたFuture Convenience Store C […]
KITオープンキャンパス:協働型ロボットSawyerによるデモ (2021-7-14) - 7/17(土),18(日)にKITオープンキャンパスが開催されます.ロボティクス学科のブースでは出村研究室が協働型ロボットSawyerを使い未来のコンビニをテーマとしたFuture Convenience Store C […] Webots講座8:キーボード入力によるマニュアル操作(Python) (2021-7-13) - Webots講座の8回目です.今までWebots入門講座という名称でしたが,今後発展的な内容も増えてくると思うのでWebots講座に変更しました.さて,引き続きWebotsの自動運転シミュレータを使っていきます.今回はキ […]
Webots講座8:キーボード入力によるマニュアル操作(Python) (2021-7-13) - Webots講座の8回目です.今までWebots入門講座という名称でしたが,今後発展的な内容も増えてくると思うのでWebots講座に変更しました.さて,引き続きWebotsの自動運転シミュレータを使っていきます.今回はキ […] Webots講座7:LIDARの使い方と障害物回避 (Python) (2021-7-5) - Webots講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障害物回避を実現します […]
Webots講座7:LIDARの使い方と障害物回避 (Python) (2021-7-5) - Webots講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障害物回避を実現します […] Webots講座6:カメラの使い方と簡単な自動運転 (Python) (2021-7-4) - Webots講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサンプルプログラムを紹介 […]
Webots講座6:カメラの使い方と簡単な自動運転 (Python) (2021-7-4) - Webots講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサンプルプログラムを紹介 […] Webots講座5:スーパーバイザ・コントローラ (Python) (2021-6-30) - Webots講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパバイザ(Supervisor)コントローラがあります.スーパーバイザ […]
Webots講座5:スーパーバイザ・コントローラ (Python) (2021-6-30) - Webots講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパバイザ(Supervisor)コントローラがあります.スーパーバイザ […]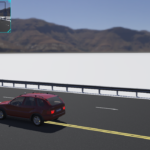 ロボット知能工学特論:第12週 演習4 (2021-6-29) - このページは金沢工業大学大学院機械工学専攻ロボット知能工学特論のサポートページです。第12週はWebotsの自動運転シミュレータに,カメラを使いコース中央にある黄色ラインを追従する制御プログラムとLIDARを使った障害物 […]
ロボット知能工学特論:第12週 演習4 (2021-6-29) - このページは金沢工業大学大学院機械工学専攻ロボット知能工学特論のサポートページです。第12週はWebotsの自動運転シミュレータに,カメラを使いコース中央にある黄色ラインを追従する制御プログラムとLIDARを使った障害物 […]