
 Webots講座7-2023:LIDARを使った簡単な障害物回避 (Python) (2023-6-26) - Webots講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障害物回避を実現します […]
Webots講座7-2023:LIDARを使った簡単な障害物回避 (Python) (2023-6-26) - Webots講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障害物回避を実現します […] Webots講座6-2023:カメラを使った簡単な自動運転 (Python) (2023-6-26) - Webots講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサンプルプログラムを紹介 […]
Webots講座6-2023:カメラを使った簡単な自動運転 (Python) (2023-6-26) - Webots講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサンプルプログラムを紹介 […]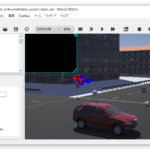 Webots講座5-2023:スーパーバイザ・コントローラ (Python) (2023-6-26) - Webots講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパーバイザ(Supervisor)コントローラがあります.スーパーバイ […]
Webots講座5-2023:スーパーバイザ・コントローラ (Python) (2023-6-26) - Webots講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパーバイザ(Supervisor)コントローラがあります.スーパーバイ […] Webots講座4-2023:自分の位置を知ろう (Python) (2023-6-26) - Webots講座の4回目です.今回も前回に引き続き,Webotsの自動運転シミュレータを使います.BMW X5に搭載されているGPSを使い自分の位置(自己位置)を知る方法を学びます. レファレンス Webots for […]
Webots講座4-2023:自分の位置を知ろう (Python) (2023-6-26) - Webots講座の4回目です.今回も前回に引き続き,Webotsの自動運転シミュレータを使います.BMW X5に搭載されているGPSを使い自分の位置(自己位置)を知る方法を学びます. レファレンス Webots for […] Webots講座3-2023:自動運転シミュレータ (Python) (2023-6-26) - Webots講座の3回目です.今回は,Webotsの自動運転シミュレータを使ってBMW X5をPython言語により直進させるところまでを学びます.BMWのオーナーになった気分でやっていきましょう! レファレンス Web […]
Webots講座3-2023:自動運転シミュレータ (Python) (2023-6-26) - Webots講座の3回目です.今回は,Webotsの自動運転シミュレータを使ってBMW X5をPython言語により直進させるところまでを学びます.BMWのオーナーになった気分でやっていきましょう! レファレンス Web […]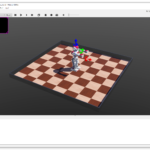 Webots講座2-2023:プログラミングしよう!(Python) (2023-6-20) - Webots講座の2回目です.さっそく,Pythonを使ってロボットを動かしてみましょう. レファレンス Webots User Guide (Cyberbotics, Inc.) 環 境 Windows 11 Anac […]
Webots講座2-2023:プログラミングしよう!(Python) (2023-6-20) - Webots講座の2回目です.さっそく,Pythonを使ってロボットを動かしてみましょう. レファレンス Webots User Guide (Cyberbotics, Inc.) 環 境 Windows 11 Anac […] Webots講座1-2023:インストールとデモの鑑賞 (2023-6-20) - Webotsって何? 最近,Webotsというロボットシミュレータを良く耳にしませんか?ロボカップジュニア世界大会2021がオンライン開催になり,サッカーチャレンジをはじめとする複数のリーグでWebotsを使った競技が開 […]
Webots講座1-2023:インストールとデモの鑑賞 (2023-6-20) - Webotsって何? 最近,Webotsというロボットシミュレータを良く耳にしませんか?ロボカップジュニア世界大会2021がオンライン開催になり,サッカーチャレンジをはじめとする複数のリーグでWebotsを使った競技が開 […] Happy Robot 2023 for RoboCup@Home Education (2023-6-14) - 次のURLはRoboCup世界大会2023 @Home Education Workshop & Challengに出場する金沢工業大学 ロボティクス学科 出村研究室 Happy Robotチームのオフィシャルペ […]
Happy Robot 2023 for RoboCup@Home Education (2023-6-14) - 次のURLはRoboCup世界大会2023 @Home Education Workshop & Challengに出場する金沢工業大学 ロボティクス学科 出村研究室 Happy Robotチームのオフィシャルペ […] 確率ロボティクス特論2023:第2週 ハンズオン (2023-6-6) - このページは金沢工業大学大学院機械工学専攻確率ロボティクス特論のサポートページです。第2週は教科書を使っていく上でのソフトウェアのインストールとその使い方のハンズオンとなります。 教科書 詳細 確率ロボティクス -Pyt […]
確率ロボティクス特論2023:第2週 ハンズオン (2023-6-6) - このページは金沢工業大学大学院機械工学専攻確率ロボティクス特論のサポートページです。第2週は教科書を使っていく上でのソフトウェアのインストールとその使い方のハンズオンとなります。 教科書 詳細 確率ロボティクス -Pyt […] RoboCup2023世界大会:Happy Robot審査資料 (2023-5-12) - 金沢工業大学 Happy Robotチームの世界大会審査用ウェブサイトです. テクニカルビデオ テクニカルペーパー Happy Robot 2023 Team Description Paper ウェブサイト https […]
RoboCup2023世界大会:Happy Robot審査資料 (2023-5-12) - 金沢工業大学 Happy Robotチームの世界大会審査用ウェブサイトです. テクニカルビデオ テクニカルペーパー Happy Robot 2023 Team Description Paper ウェブサイト https […] RoboCup Japan Open 2023 @Home Education Open Challenge 準優勝 (2023-5-9) - 出村研究室Happy Robot Educationチームが準優勝しました. RoboCup Japan Open 2023 @Home Educationリーグに出場した金沢工業大学出村研究室Happy Robot E […]
RoboCup Japan Open 2023 @Home Education Open Challenge 準優勝 (2023-5-9) - 出村研究室Happy Robot Educationチームが準優勝しました. RoboCup Japan Open 2023 @Home Educationリーグに出場した金沢工業大学出村研究室Happy Robot E […] AIロボット本:日本ロボット学会賞受賞 (2023-5-9) - RoboCup Japan Open 2023の表彰式で,AIロボット本で共著の先生と日本ロボット学会@ホームリーグ賞を頂きました。これも読者皆様のおかげです。ありがとうございます!
AIロボット本:日本ロボット学会賞受賞 (2023-5-9) - RoboCup Japan Open 2023の表彰式で,AIロボット本で共著の先生と日本ロボット学会@ホームリーグ賞を頂きました。これも読者皆様のおかげです。ありがとうございます!  RoboCup Japan Open 2023 @Home Educationリーグ優勝 (2023-5-9) - 夢考房RoboCup@Homeプロジェクトが2連覇しました. RoboCup Japan Open 2023 @Home Educationリーグに出場した夢考房RoboCup@HomeプロジェクトのKIT Happy […]
RoboCup Japan Open 2023 @Home Educationリーグ優勝 (2023-5-9) - 夢考房RoboCup@Homeプロジェクトが2連覇しました. RoboCup Japan Open 2023 @Home Educationリーグに出場した夢考房RoboCup@HomeプロジェクトのKIT Happy […] AIロボティクス特論2023:第2週はじめてのROS2 (2023-4-18) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2023年前学期開講の「AIロボティクス特論」の第2週用の記事です. この本の第2章に対 […] AIロボティクス特論2023:第1週AIロボットを作ろう! (2023-4-11) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2023年前学期開講の「AIロボティクス特論」の第1週用の記事です. この本の第1章に対 […] Kindle版発売:ROS2とPythonで作って学ぶAIロボット入門 (2023-1-18) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)のKindle版(電子書籍)の配信が2023年1月18日から始まりました. お陰様で拙著は好調な売れ行きで,発刊以来4ヶ月余りで3刷りになりました.これ […]
AIロボティクス特論2023:第2週はじめてのROS2 (2023-4-18) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2023年前学期開講の「AIロボティクス特論」の第2週用の記事です. この本の第2章に対 […] AIロボティクス特論2023:第1週AIロボットを作ろう! (2023-4-11) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2023年前学期開講の「AIロボティクス特論」の第1週用の記事です. この本の第1章に対 […] Kindle版発売:ROS2とPythonで作って学ぶAIロボット入門 (2023-1-18) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)のKindle版(電子書籍)の配信が2023年1月18日から始まりました. お陰様で拙著は好調な売れ行きで,発刊以来4ヶ月余りで3刷りになりました.これ […]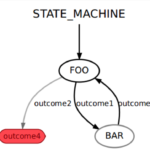 AIロボット入門:第7章プランニング (2023-1-16) - 拙著(以下,教科書と表記)「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用したときの補足資料です. 教科書では,Smach(State Machine, スマッチと発音することが多いようです. […]
AIロボット入門:第7章プランニング (2023-1-16) - 拙著(以下,教科書と表記)「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用したときの補足資料です. 教科書では,Smach(State Machine, スマッチと発音することが多いようです. […] AIロボット入門:第6章マニピュレーション simple_arm (2022-12-23) - 拙著(以下,教科書と表記)「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用したときの補足資料です. 6章マニピュレーションの補足サンプル.教科書では,P192のsimple_armをGUIで動 […]
AIロボット入門:第6章マニピュレーション simple_arm (2022-12-23) - 拙著(以下,教科書と表記)「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用したときの補足資料です. 6章マニピュレーションの補足サンプル.教科書では,P192のsimple_armをGUIで動 […] RoboCup2023世界大会 資格審査資料 (2022-12-12) - 2023年7月4日~10日,フランスのボルドーで開催されるRoboCup2023世界大会 RoboCup@Home Open Platform リーグに出場するための資格審査資料を提出しました.以下のビデオはその一つです […]
RoboCup2023世界大会 資格審査資料 (2022-12-12) - 2023年7月4日~10日,フランスのボルドーで開催されるRoboCup2023世界大会 RoboCup@Home Open Platform リーグに出場するための資格審査資料を提出しました.以下のビデオはその一つです […]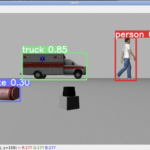 AIロボット入門:第5章ビジョン3– 深層学習による物体検出 (2022-12-9) - 拙著(以下,教科書と表記)「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 5章ビジョンの5.7.2節(p.180) 深層学習による物体検出の補足記事です.教 […]
AIロボット入門:第5章ビジョン3– 深層学習による物体検出 (2022-12-9) - 拙著(以下,教科書と表記)「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 5章ビジョンの5.7.2節(p.180) 深層学習による物体検出の補足記事です.教 […]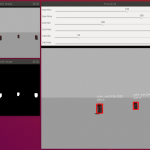 AIロボット入門:第5章ビジョン2– 基礎的な物体検出器を作ろう! (2022-12-8) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 5章ビジョンの補足です。カメラから取得した画像データをOpenCVを使い画像処理することを学んだので、今 […]
AIロボット入門:第5章ビジョン2– 基礎的な物体検出器を作ろう! (2022-12-8) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 5章ビジョンの補足です。カメラから取得した画像データをOpenCVを使い画像処理することを学んだので、今 […] AIロボット入門:第5章ビジョン1 – OpenCVとPythonプログラムで画像処理をしよう! (2022-12-8) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は、5章ビジョンの補足です。コンピュータビジョンライブラリの定番OpenCVをROSで使うためにcv […] 拙著AIロボット入門第3刷決定 (2022-12-1) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」が講談社から2022年8月30日に発刊になりました.おかげさまで好評を頂いています.短期間で増刷が次のように決まりました. 第1刷:2022年8月30日 第2刷: […]
AIロボット入門:第5章ビジョン1 – OpenCVとPythonプログラムで画像処理をしよう! (2022-12-8) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は、5章ビジョンの補足です。コンピュータビジョンライブラリの定番OpenCVをROSで使うためにcv […] 拙著AIロボット入門第3刷決定 (2022-12-1) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」が講談社から2022年8月30日に発刊になりました.おかげさまで好評を頂いています.短期間で増刷が次のように決まりました. 第1刷:2022年8月30日 第2刷: […] 第4回 AIロボット入門講習会 (2022年11月27日13時~) (2022-11-21) - 拙著 「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を教科書に使うオンライン講習会(無料)を各著者が講師となって実施します. 第1回目が408名,第2回目が210名,第3回目が190名,第4回目が現時点 […]
第4回 AIロボット入門講習会 (2022年11月27日13時~) (2022-11-21) - 拙著 「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を教科書に使うオンライン講習会(無料)を各著者が講師となって実施します. 第1回目が408名,第2回目が210名,第3回目が190名,第4回目が現時点 […]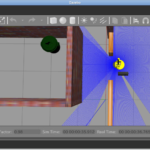 AIロボット入門:チャレンジ4.6 ドアオープン補足 (p.117) (2022-11-16) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の読者からシミュレータでのロボット初期姿勢について質問があったチャレンジ4.6:ドアオープン(p.117)について補足します. このチャレンジを実施する […]
AIロボット入門:チャレンジ4.6 ドアオープン補足 (p.117) (2022-11-16) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の読者からシミュレータでのロボット初期姿勢について質問があったチャレンジ4.6:ドアオープン(p.117)について補足します. このチャレンジを実施する […]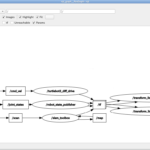 AIロボット入門:4.3.8 ROS2での地図作成法 (2022-11-16) - 教科書用Docker環境では4.3.8 ROS2での地図作成法で,教科書どおりコマンドを実行して地図が生成されます.そのときの,rqt_graphの出力,全ノードリストとトピックリストは次のとおりです. [全ノードリスト […] 第3回 AIロボット入門講習会 (2022年11月20日13時~) (2022-11-14) - 拙著 「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を教科書に使うオンライン講習会(無料)を各著者が講師となって実施します. 第1回目が11/3,第2回が11/13に終了しました.多くの方に参加頂きあり […] 第2回 AIロボット入門講習会 (2022年11月13日13時~) (2022-11-4) - 拙著 「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を教科書に使うオンライン講習会(無料)を各著者が講師となって実施します. 第1回目が11/3に終了しました.Zoom参加申し込みが196名,録画・資料 […]
AIロボット入門:4.3.8 ROS2での地図作成法 (2022-11-16) - 教科書用Docker環境では4.3.8 ROS2での地図作成法で,教科書どおりコマンドを実行して地図が生成されます.そのときの,rqt_graphの出力,全ノードリストとトピックリストは次のとおりです. [全ノードリスト […] 第3回 AIロボット入門講習会 (2022年11月20日13時~) (2022-11-14) - 拙著 「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を教科書に使うオンライン講習会(無料)を各著者が講師となって実施します. 第1回目が11/3,第2回が11/13に終了しました.多くの方に参加頂きあり […] 第2回 AIロボット入門講習会 (2022年11月13日13時~) (2022-11-4) - 拙著 「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を教科書に使うオンライン講習会(無料)を各著者が講師となって実施します. 第1回目が11/3に終了しました.Zoom参加申し込みが196名,録画・資料 […]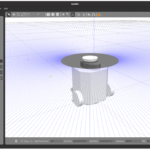 AIロボット入門2022:第4章3節 Turtlebot3をシミュレータで動かそう! (2022-10-28) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です.教科書 [第4章 ナビゲーション] の[4.3.3節 シミュレータとリアルロボットを動かす方法 (p.10 […]
AIロボット入門2022:第4章3節 Turtlebot3をシミュレータで動かそう! (2022-10-28) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です.教科書 [第4章 ナビゲーション] の[4.3.3節 シミュレータとリアルロボットを動かす方法 (p.10 […] AIロボット入門2022:第4章3節 SLAM (2022-10-28) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は,SLAMを使って地図を作成します.教科書 [第4章 ナビゲーション] の[4.3.8節 ROS2 […]
AIロボット入門2022:第4章3節 SLAM (2022-10-28) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は,SLAMを使って地図を作成します.教科書 [第4章 ナビゲーション] の[4.3.8節 ROS2 […] AIロボット入門2022:第2章7節 サービス通信プログラムのつくり方 (2022-10-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は, [第2章 はじめてのROS2] の2.7節 サービス通信プログラムのつくり方を説明します. & […] 第1回 AIロボット入門講習会 (2022年11月3日13時~) (2022-10-17) - 拙著 「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を教科書に使うオンライン講習会(無料)を各著者が講師となって実施します.第1回目は第1章,第2章を出村が,この本用Dockerイメージについて升谷先生 […] AIロボット入門2022:第3週 はじめてのROS2(2/2) (2022-10-12) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料です. 金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)の第3週 はじめてのROS2 […]
AIロボット入門2022:第2章7節 サービス通信プログラムのつくり方 (2022-10-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は, [第2章 はじめてのROS2] の2.7節 サービス通信プログラムのつくり方を説明します. & […] 第1回 AIロボット入門講習会 (2022年11月3日13時~) (2022-10-17) - 拙著 「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を教科書に使うオンライン講習会(無料)を各著者が講師となって実施します.第1回目は第1章,第2章を出村が,この本用Dockerイメージについて升谷先生 […] AIロボット入門2022:第3週 はじめてのROS2(2/2) (2022-10-12) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料です. 金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)の第3週 はじめてのROS2 […] AIロボット入門2022:第2章6節 トピック通信プログラムのつくり方 (2022-10-12) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は, [第2章 はじめてのROS2] の2.6節 トピック通信プログラムのつくり方を説明します. & […]
AIロボット入門2022:第2章6節 トピック通信プログラムのつくり方 (2022-10-12) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は, [第2章 はじめてのROS2] の2.6節 トピック通信プログラムのつくり方を説明します. & […] AIロボット入門2022:第2章5節 ROS2プログラムの作り方 (2022-10-12) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は, [第2章 はじめてのROS2] の2.5節 ROS2プログラムの作り方を説明します. &nbs […] ROS2とPythonで作って学ぶAIロボット入門の講義資料 (2022-10-8) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料一覧です. 金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)での資料をもとに作成して […]
AIロボット入門2022:第2章5節 ROS2プログラムの作り方 (2022-10-12) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は, [第2章 はじめてのROS2] の2.5節 ROS2プログラムの作り方を説明します. &nbs […] ROS2とPythonで作って学ぶAIロボット入門の講義資料 (2022-10-8) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料一覧です. 金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)での資料をもとに作成して […] AIロボット入門2022:Docker Desktop for Windowsのインストール (Windows10 Home) (2022-10-8) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […]
AIロボット入門2022:Docker Desktop for Windowsのインストール (Windows10 Home) (2022-10-8) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […] AIロボット入門2022:第2週 はじめてのROS2(1/2) (2022-10-6) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)の第2週 はじめてのROS2(1 […] AIロボット入門2022:第1週 AIロボットをつくろう! (2022-9-30) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)の第1週 AIロボットをつくろう […]
AIロボット入門2022:第2週 はじめてのROS2(1/2) (2022-10-6) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)の第2週 はじめてのROS2(1 […] AIロボット入門2022:第1週 AIロボットをつくろう! (2022-9-30) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)の第1週 AIロボットをつくろう […] LEGO Mindstorms EV3 開発環境のインストール (v0.1) (2022-9-29) - 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして,組込みプログラミングの基礎を楽しく学びます.なお,本ページのインストール […]
LEGO Mindstorms EV3 開発環境のインストール (v0.1) (2022-9-29) - 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして,組込みプログラミングの基礎を楽しく学びます.なお,本ページのインストール […] プログラミング言語2022:第1週授業まとめ (2022-9-28) - 金沢工業大学ロボティクス学科プログラミング言語の授業用ページです。 Moodleは10/1以降でないと利用できないので、必要な情報をここにまとめました。 講義資料 講義パワーポイント(学内のみダウンロード可 […]
プログラミング言語2022:第1週授業まとめ (2022-9-28) - 金沢工業大学ロボティクス学科プログラミング言語の授業用ページです。 Moodleは10/1以降でないと利用できないので、必要な情報をここにまとめました。 講義資料 講義パワーポイント(学内のみダウンロード可 […] プログラミング言語2022:gtypistのインストールと使い方 (2022-9-28) - プログラミング言語はタッチタイプのトレーニングにgtypistをロボティクス学科教員がカスタイズしたものを使います。タッチタイプはキーボードを見ないでキーを打つことです。欧米諸国では小学校でタッチタイプを学んでいて、日本 […]
プログラミング言語2022:gtypistのインストールと使い方 (2022-9-28) - プログラミング言語はタッチタイプのトレーニングにgtypistをロボティクス学科教員がカスタイズしたものを使います。タッチタイプはキーボードを見ないでキーを打つことです。欧米諸国では小学校でタッチタイプを学んでいて、日本 […] プログラミング言語2022:VS Code (VSCodium) の使い方 (2022-9-28) - この記事はKITロボティクス学科プログラミング言語用で、授業で配布したVSCodiumのポータブル環境用です。 では、さっそくVSCodiumを使ってみましょう。 起 動 デスクトップに作ったVSCodiumのショートカ […]
プログラミング言語2022:VS Code (VSCodium) の使い方 (2022-9-28) - この記事はKITロボティクス学科プログラミング言語用で、授業で配布したVSCodiumのポータブル環境用です。 では、さっそくVSCodiumを使ってみましょう。 起 動 デスクトップに作ったVSCodiumのショートカ […] プログラミング言語2022:VS Code (VSCodium)のインストール (2022-9-28) - この記事はKITロボティクス学科プログラミング言語の授業用です。 ロボティクス学科対象のプログラミング言語(出村担当)ではC言語のエディタとして今年度からVSCodiumを使います。VS CodiumはマイクロソフトのV […]
プログラミング言語2022:VS Code (VSCodium)のインストール (2022-9-28) - この記事はKITロボティクス学科プログラミング言語の授業用です。 ロボティクス学科対象のプログラミング言語(出村担当)ではC言語のエディタとして今年度からVSCodiumを使います。VS CodiumはマイクロソフトのV […] PD実践2022:LEGO Digital Designerのインストール (2022-9-27) - 本記事では、KITロボティクス学科2021年度後学期PD実践で使用するLEGOブロックの3DシミュレータであるLEGO Digital Designerをインストール法を説明します。なお、KIT関係者しかファイルをダウン […] PD実践2022:TA/SAトレーニング (2022-9-27) - PD実践2022のTA/SAのトレーニングページです.以下のリンクの説明に従って取り組んでください.9/25(木)は4番までは終えてください.5番は来週以降でもかまいません. LEGO Mindstorms EV3 開発 […] PD実践2022:第1週 ガイダンス・開発環境のインストール (2022-9-27) - 1週目(9/29):ガイダンス・開発環境のインストール 担当教員、TA、SAの紹介(講義室) 授業の概要説明(講義室) 本資料の説明 ETロボコンの説明 PD実践:LEGO Mindstorms EV3 開発環境のインス […] PD実践2022:授業概要 (2022-9-27) - 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして、組込みプログラミングの基礎を楽しく学びます。 講義日:木曜 […] AIロボット入門2022:LXDEデスクトップ環境の使い方 (2022-9-18) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は,この本のDockerイメージが使っているUbuntuの軽量デスクトップLXDE (Lightwe […]
PD実践2022:LEGO Digital Designerのインストール (2022-9-27) - 本記事では、KITロボティクス学科2021年度後学期PD実践で使用するLEGOブロックの3DシミュレータであるLEGO Digital Designerをインストール法を説明します。なお、KIT関係者しかファイルをダウン […] PD実践2022:TA/SAトレーニング (2022-9-27) - PD実践2022のTA/SAのトレーニングページです.以下のリンクの説明に従って取り組んでください.9/25(木)は4番までは終えてください.5番は来週以降でもかまいません. LEGO Mindstorms EV3 開発 […] PD実践2022:第1週 ガイダンス・開発環境のインストール (2022-9-27) - 1週目(9/29):ガイダンス・開発環境のインストール 担当教員、TA、SAの紹介(講義室) 授業の概要説明(講義室) 本資料の説明 ETロボコンの説明 PD実践:LEGO Mindstorms EV3 開発環境のインス […] PD実践2022:授業概要 (2022-9-27) - 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして、組込みプログラミングの基礎を楽しく学びます。 講義日:木曜 […] AIロボット入門2022:LXDEデスクトップ環境の使い方 (2022-9-18) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は,この本のDockerイメージが使っているUbuntuの軽量デスクトップLXDE (Lightwe […]