
 専門実験2023ロボット制御Ⅰ:第1週 実習1 実機での操作 (2024-9-27) - このページは以下のRobotis社e-manualにベースに作成したものです.以下の説明を良く読んで、そのとおり実習を進めてください。ノートPCにLinuxを起動するためのUSBを差し込む前に、PCの電源を入れないでくだ […]
専門実験2023ロボット制御Ⅰ:第1週 実習1 実機での操作 (2024-9-27) - このページは以下のRobotis社e-manualにベースに作成したものです.以下の説明を良く読んで、そのとおり実習を進めてください。ノートPCにLinuxを起動するためのUSBを差し込む前に、PCの電源を入れないでくだ […] AIロボット入門2024:第1週 AIロボットをつくろう! (2024-9-26) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学ロボティクス学科3年次2024年後学期開講のロボットプログラミングⅡ(2単位)の第1週 AIロボットをつくろう […]
AIロボット入門2024:第1週 AIロボットをつくろう! (2024-9-26) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学ロボティクス学科3年次2024年後学期開講のロボットプログラミングⅡ(2単位)の第1週 AIロボットをつくろう […] AIロボット入門2024:LXDEデスクトップ環境の使い方 (2024-9-26) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料です. 今回は,この本のDockerイメージが使っているUbuntuの軽量デスクトップLXDE (Lightweight […]
AIロボット入門2024:LXDEデスクトップ環境の使い方 (2024-9-26) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料です. 今回は,この本のDockerイメージが使っているUbuntuの軽量デスクトップLXDE (Lightweight […] AIロボット入門2024:Dockerイメージのダウンロードと使い方(Windows) (2024-9-26) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2024年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […]
AIロボット入門2024:Dockerイメージのダウンロードと使い方(Windows) (2024-9-26) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2024年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […] AIロボット入門2024:Docker Desktop for Windowsのインストール (Windows11 Home) (2024-9-26) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2024年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […]
AIロボット入門2024:Docker Desktop for Windowsのインストール (Windows11 Home) (2024-9-26) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2024年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […] プログラミング基礎Ⅰ(再履修クラス) (2024-9-26) - 金沢工業大学ロボティクス学科プログラミング基礎I(再履修クラス)の授業用ページです。 Moodleは2週目以降でないと利用できないので、必要な情報をここにまとめました。 講義資料 講義パワーポイント(KIT関係者のみダウ […]
プログラミング基礎Ⅰ(再履修クラス) (2024-9-26) - 金沢工業大学ロボティクス学科プログラミング基礎I(再履修クラス)の授業用ページです。 Moodleは2週目以降でないと利用できないので、必要な情報をここにまとめました。 講義資料 講義パワーポイント(KIT関係者のみダウ […] プログラミング基礎Ⅰ2024:VS Code (VSCodium) の使い方 (2024-9-26) - この記事はKITロボティクス学科プログラミング基礎Ⅰ用で、授業で配布したVSCodiumのポータブル環境用です。 では、さっそくVSCodiumを使ってみましょう。 起 動 デスクトップに作ったVSCodiumのショート […]
プログラミング基礎Ⅰ2024:VS Code (VSCodium) の使い方 (2024-9-26) - この記事はKITロボティクス学科プログラミング基礎Ⅰ用で、授業で配布したVSCodiumのポータブル環境用です。 では、さっそくVSCodiumを使ってみましょう。 起 動 デスクトップに作ったVSCodiumのショート […] プログラミング基礎Ⅰ2024:gtypistのインストールと使い方 (2024-9-25) - プログラミング言語はタッチタイプのトレーニングにgtypistをロボティクス学科教員がカスタイズしたものを使います。タッチタイプはキーボードを見ないでキーを打つことです。欧米諸国では小学校でタッチタイプを学んでいて、日本 […]
プログラミング基礎Ⅰ2024:gtypistのインストールと使い方 (2024-9-25) - プログラミング言語はタッチタイプのトレーニングにgtypistをロボティクス学科教員がカスタイズしたものを使います。タッチタイプはキーボードを見ないでキーを打つことです。欧米諸国では小学校でタッチタイプを学んでいて、日本 […] プログラミング基礎Ⅰ2024:VSCodiumのインストール (2024-9-25) - この記事はKITロボティクス学科プログラミング基礎Iの授業用です。 ロボティクス学科対象のプログラミング基礎Ⅰ(出村担当)ではC言語のエディタとしてVSCodiumを使います。VS CodiumはマイクロソフトのVS C […]
プログラミング基礎Ⅰ2024:VSCodiumのインストール (2024-9-25) - この記事はKITロボティクス学科プログラミング基礎Iの授業用です。 ロボティクス学科対象のプログラミング基礎Ⅰ(出村担当)ではC言語のエディタとしてVSCodiumを使います。VS CodiumはマイクロソフトのVS C […]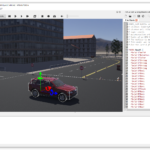 Webots講座9-2024:PROTOファイル(アッカーマン・ビークル) (2024-7-9) - Webots講座2024の9回目,最終回です.Webots講座4:自分の位置を知ろう(Python)でデッドレコニングを実装するハンズオンがありました.デッドレコニングを実装するには,そのロボットのホイールベースなどのパ […]
Webots講座9-2024:PROTOファイル(アッカーマン・ビークル) (2024-7-9) - Webots講座2024の9回目,最終回です.Webots講座4:自分の位置を知ろう(Python)でデッドレコニングを実装するハンズオンがありました.デッドレコニングを実装するには,そのロボットのホイールベースなどのパ […]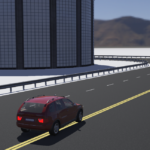 Webots講座8-2024:キーボード入力によるマニュアル運転(Python) (2024-7-9) - Webots講座の8回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はキーボードによるマニュアル操作を導入します.これでゲームのように車を操作できますね. レファレンス Keyboard (Cy […]
Webots講座8-2024:キーボード入力によるマニュアル運転(Python) (2024-7-9) - Webots講座の8回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はキーボードによるマニュアル操作を導入します.これでゲームのように車を操作できますね. レファレンス Keyboard (Cy […] Webots講座7-2024:LIDARを使った簡単な障害物回避 (Python) (2024-7-9) - Webots講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障害物回避を実現します […]
Webots講座7-2024:LIDARを使った簡単な障害物回避 (Python) (2024-7-9) - Webots講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障害物回避を実現します […] Webots講座6-2024:カメラを使った簡単な自動運転 (Python) (2024-7-9) - Webots講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサンプルプログラムを紹介 […]
Webots講座6-2024:カメラを使った簡単な自動運転 (Python) (2024-7-9) - Webots講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサンプルプログラムを紹介 […]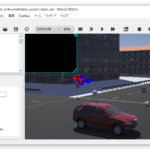 Webots講座5-2024:スーパーバイザ・コントローラ (Python) (2024-7-2) - Webots講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパーバイザ(Supervisor)コントローラがあります.スーパーバイ […]
Webots講座5-2024:スーパーバイザ・コントローラ (Python) (2024-7-2) - Webots講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパーバイザ(Supervisor)コントローラがあります.スーパーバイ […] Webots講座4-2024:自分の位置を知ろう (Python) (2024-7-2) - Webots講座の4回目です.今回も前回に引き続き,Webotsの自動運転シミュレータを使います.BMW X5に搭載されているGPSを使い自分の位置(自己位置)を知る方法を学びます. レファレンス Webots for […]
Webots講座4-2024:自分の位置を知ろう (Python) (2024-7-2) - Webots講座の4回目です.今回も前回に引き続き,Webotsの自動運転シミュレータを使います.BMW X5に搭載されているGPSを使い自分の位置(自己位置)を知る方法を学びます. レファレンス Webots for […] Webots講座3-2024:自動運転シミュレータ (Python) (2024-6-25) - Webots講座の3回目です.今回は,Webotsの自動運転シミュレータを使ってBMW X5をPython言語により直進させるところまでを学びます.BMWのオーナーになった気分でやっていきましょう! レファレンス Web […]
Webots講座3-2024:自動運転シミュレータ (Python) (2024-6-25) - Webots講座の3回目です.今回は,Webotsの自動運転シミュレータを使ってBMW X5をPython言語により直進させるところまでを学びます.BMWのオーナーになった気分でやっていきましょう! レファレンス Web […] Webots講座2-2024:プログラミングしよう!(Python) (2024-6-25) - Webots講座の2回目です.さっそく,Pythonを使ってロボットを動かしてみましょう. レファレンス Webots User Guide (Cyberbotics, Inc.) 環 境 Windows 11 Anac […]
Webots講座2-2024:プログラミングしよう!(Python) (2024-6-25) - Webots講座の2回目です.さっそく,Pythonを使ってロボットを動かしてみましょう. レファレンス Webots User Guide (Cyberbotics, Inc.) 環 境 Windows 11 Anac […] Webots講座1-2024:インストールとデモの鑑賞 (2024-6-18) - Webotsって何? Webotsの日本語資料は少ないので,自分の勉強も兼ねて昨年に引き続きWebots講座を連載します. さて,Webotsとは何でしょう?それは,Webotsはオープンソースでマルチプラットフォームの […]
Webots講座1-2024:インストールとデモの鑑賞 (2024-6-18) - Webotsって何? Webotsの日本語資料は少ないので,自分の勉強も兼ねて昨年に引き続きWebots講座を連載します. さて,Webotsとは何でしょう?それは,Webotsはオープンソースでマルチプラットフォームの […] 確率ロボティクス特論2024:第2週 ハンズオン (2024-6-11) - このページは金沢工業大学大学院機械工学専攻確率ロボティクス特論のサポートページです。第2週は教科書を使っていく上で必要なソフトウェアAnacondaのインストールとJupyter Notebookの使い方のハンズオンとな […]
確率ロボティクス特論2024:第2週 ハンズオン (2024-6-11) - このページは金沢工業大学大学院機械工学専攻確率ロボティクス特論のサポートページです。第2週は教科書を使っていく上で必要なソフトウェアAnacondaのインストールとJupyter Notebookの使い方のハンズオンとな […] AIロボティクス特論2024:第6週マニピュレーション (2024-5-21) - 拙著(以下,教科書と表記)「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 6章マニピュレーションの補足記事です.P192のsimple_armをプログラムで […] AIロボティクス特論2024:第5週ロボットビジョン (2024-5-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2023年前学期開講の「AIロボティクス特論」の第5週用の記事です.拙著の第5章に対応し […]
AIロボティクス特論2024:第6週マニピュレーション (2024-5-21) - 拙著(以下,教科書と表記)「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 6章マニピュレーションの補足記事です.P192のsimple_armをプログラムで […] AIロボティクス特論2024:第5週ロボットビジョン (2024-5-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2023年前学期開講の「AIロボティクス特論」の第5週用の記事です.拙著の第5章に対応し […] ROS2ハンズオン5-3:深層学習による物体検出 (2024-5-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 5章ビジョンの5.7.2節(p.180) 深層学習による物体検出です.前回,古典的な物体検出のプログラム […]
ROS2ハンズオン5-3:深層学習による物体検出 (2024-5-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 5章ビジョンの5.7.2節(p.180) 深層学習による物体検出です.前回,古典的な物体検出のプログラム […] ROS2ハンズオン5-2:基礎的な物体検出器を作ろう! (2024-5-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 5章ビジョンの補足です。カメラから取得した画像データをOpenCVを使い画像処理することを学んだので、今 […]
ROS2ハンズオン5-2:基礎的な物体検出器を作ろう! (2024-5-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 5章ビジョンの補足です。カメラから取得した画像データをOpenCVを使い画像処理することを学んだので、今 […] ROS2ハンズオン5-1:OpenCVとPythonプログラムで画像処理をしよう! (2024-5-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は、5章ビジョンの補足です。コンピュータビジョンライブラリの定番OpenCVをROSで使うためにcv […] AIロボティクス特論2024:第3週ナビゲーション (2024-5-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2023年前学期開講の「AIロボティクス特論」の第3週用の記事です.拙著の第4章に対応し […]
ROS2ハンズオン5-1:OpenCVとPythonプログラムで画像処理をしよう! (2024-5-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は、5章ビジョンの補足です。コンピュータビジョンライブラリの定番OpenCVをROSで使うためにcv […] AIロボティクス特論2024:第3週ナビゲーション (2024-5-21) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2023年前学期開講の「AIロボティクス特論」の第3週用の記事です.拙著の第4章に対応し […] ROS2ハンズオン3-3:地図を作ろう! (2024-5-21) - 今回は,SLAMを使って地図を作成します.教科書 [第4章 ナビゲーション] の[4.3.8節 ROS2での地図作成法 (p.123)]に相当します. ROS2 Foxyの標準SLAMパッケージはslam_toolbox […]
ROS2ハンズオン3-3:地図を作ろう! (2024-5-21) - 今回は,SLAMを使って地図を作成します.教科書 [第4章 ナビゲーション] の[4.3.8節 ROS2での地図作成法 (p.123)]に相当します. ROS2 Foxyの標準SLAMパッケージはslam_toolbox […] ROS2ハンズオン3-1:Turtlebot3をシミュレータで動かそう! (2024-5-21) - 教科書 [第4章 ナビゲーション] の[4.3.3節 シミュレータとリアルロボットを動かす方法 (p.109)]に相当します.今回は、シミュレータGAZEBOを使い、Turtlebot3を動かします。TurtleBot3 […]
ROS2ハンズオン3-1:Turtlebot3をシミュレータで動かそう! (2024-5-21) - 教科書 [第4章 ナビゲーション] の[4.3.3節 シミュレータとリアルロボットを動かす方法 (p.109)]に相当します.今回は、シミュレータGAZEBOを使い、Turtlebot3を動かします。TurtleBot3 […] AIロボティクス特論2024:第2週はじめてのROS2 (2024-4-15) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2023年前学期開講の「AIロボティクス特論」の第2週用の記事です.拙著の第2章に対応し […] AIロボティクス特論2024:第1週AIロボットを作ろう! (2024-4-8) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2024年度前学期開講の「AIロボティクス特論」の第1週用の記事です. ホ […]
AIロボティクス特論2024:第2週はじめてのROS2 (2024-4-15) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2023年前学期開講の「AIロボティクス特論」の第2週用の記事です.拙著の第2章に対応し […] AIロボティクス特論2024:第1週AIロボットを作ろう! (2024-4-8) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学工学研究科機械工学専攻2024年度前学期開講の「AIロボティクス特論」の第1週用の記事です. ホ […] カチャカでロボカップ9:ゲームコントローラで動かそう♪ (2024-3-7) - はじめに 今回は小ネタです。ROS2のteleop_twist_joyパッケージを使いPS4 DUALSHOCKなどのゲームコントローラでカチヤカを遠隔操縦する方法を説明します。 teleop_twist_joy 環 境 […]
カチャカでロボカップ9:ゲームコントローラで動かそう♪ (2024-3-7) - はじめに 今回は小ネタです。ROS2のteleop_twist_joyパッケージを使いPS4 DUALSHOCKなどのゲームコントローラでカチヤカを遠隔操縦する方法を説明します。 teleop_twist_joy 環 境 […] カチャカでロボカップ8:ROS2 Navigation2で動かそう♪ (2024-3-6) - はじめに この記事はPreferred Roboticsの寺田さんの記事を参考にカチャカをROS2のNavagation2で動かした過程をまとめ、デモ動画を掲載したものです。詳細な説明は次の寺田さんの記事をご覧ください。 […]
カチャカでロボカップ8:ROS2 Navigation2で動かそう♪ (2024-3-6) - はじめに この記事はPreferred Roboticsの寺田さんの記事を参考にカチャカをROS2のNavagation2で動かした過程をまとめ、デモ動画を掲載したものです。詳細な説明は次の寺田さんの記事をご覧ください。 […] Ubuntu22.04:インストールと設定 (ThinkPad X1 Extreme Gen4) (2024-3-4) - Ubuntu22.04をThinkPad X1 Extreme Gen4にインストールと設定したのでその備忘録。ここでは、増設したSSD(Samsung 980 PRO 2TB)にインストールしていたUbuntu20. […]
Ubuntu22.04:インストールと設定 (ThinkPad X1 Extreme Gen4) (2024-3-4) - Ubuntu22.04をThinkPad X1 Extreme Gen4にインストールと設定したのでその備忘録。ここでは、増設したSSD(Samsung 980 PRO 2TB)にインストールしていたUbuntu20. […] カチャカでロボカップ7:カチャカをROS2で動かそう♪ (2024-3-3) - はじめに この記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「ROS2」を自分のPCで実行した過程を記事にしたものです。最後のおまけに、ROS2でお馴染みのteleop_twist_keyb […]
カチャカでロボカップ7:カチャカをROS2で動かそう♪ (2024-3-3) - はじめに この記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「ROS2」を自分のPCで実行した過程を記事にしたものです。最後のおまけに、ROS2でお馴染みのteleop_twist_keyb […] Docker EngineのUbuntu22.04へのインストール (2024-3-1) - この記事は次のリンクを参考にROS2 Humbleのインストールと設定に関するものです。 Install Docker Engine on Ubuntu, docs.dockercom 環境 Ubuntu Jammy 2 […]
Docker EngineのUbuntu22.04へのインストール (2024-3-1) - この記事は次のリンクを参考にROS2 Humbleのインストールと設定に関するものです。 Install Docker Engine on Ubuntu, docs.dockercom 環境 Ubuntu Jammy 2 […] ROS2:Humbleのインストール (2024-3-1) - この記事は次のリンクを参考にROS2 Humbleのインストールと設定に関するものです。 Installation/Ubuntu (Debian packages), docs.ros.org 環 境 Ub […]
ROS2:Humbleのインストール (2024-3-1) - この記事は次のリンクを参考にROS2 Humbleのインストールと設定に関するものです。 Installation/Ubuntu (Debian packages), docs.ros.org 環 境 Ub […] カチャカでロボカップ6:Playgroundで自作プログラムを動かそう♪(Ubuntu22.04) (2024-2-28) - はじめに この記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「Playground」を自分のPC(Ubuntu22.04)で実行するために必要な作業を補足して、簡単な自作サンプルプログラムを […]
カチャカでロボカップ6:Playgroundで自作プログラムを動かそう♪(Ubuntu22.04) (2024-2-28) - はじめに この記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「Playground」を自分のPC(Ubuntu22.04)で実行するために必要な作業を補足して、簡単な自作サンプルプログラムを […] カチャカでロボカップ6:Playgroundで自作プログラムを動かそう♪(Windows11) (2024-2-28) - はじめに この記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「Playground」を自分のPCで実行するために必要な作業を補足して、簡単な自作サンプルプログラムをsshでカチャカにログイン […]
カチャカでロボカップ6:Playgroundで自作プログラムを動かそう♪(Windows11) (2024-2-28) - はじめに この記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「Playground」を自分のPCで実行するために必要な作業を補足して、簡単な自作サンプルプログラムをsshでカチャカにログイン […] カチャカでロボカップ5:カチャカAPIとは♪ (2024-2-24) - はじめに この記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「カチャカAPIライブラリ」までを自分のPCで実行して、いくつかの面白いサンプルプログラムを説明した記事です。 スマートファニチャ […]
カチャカでロボカップ5:カチャカAPIとは♪ (2024-2-24) - はじめに この記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「カチャカAPIライブラリ」までを自分のPCで実行して、いくつかの面白いサンプルプログラムを説明した記事です。 スマートファニチャ […] カチャカでロボカップ4:JupyterLabで動かしてみた♪ (2024-2-23) - はじめに この記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「サンプルコードをJupyterLabで実行する」までを自分のPCで実行して、いくつかの面白いサンプルプログラムを説明した記事です […]
カチャカでロボカップ4:JupyterLabで動かしてみた♪ (2024-2-23) - はじめに この記事は次のスマートファニチャープラットフォーム「カチャカ」APIマニュアルの「サンプルコードをJupyterLabで実行する」までを自分のPCで実行して、いくつかの面白いサンプルプログラムを説明した記事です […] カチャカでロボカップ3:カチャカとおうちのロボット達♪ (2024-2-22) - カチャカが家に来るまでは、既にマイホームにいたブラーバとルンバより大きいと思っていたが、納品された箱を開封したときにパット見、小さいという印象だった。そこで、ブラーバとルンバとカチャカを並べて写真を撮ってみた写真が上。 […]
カチャカでロボカップ3:カチャカとおうちのロボット達♪ (2024-2-22) - カチャカが家に来るまでは、既にマイホームにいたブラーバとルンバより大きいと思っていたが、納品された箱を開封したときにパット見、小さいという印象だった。そこで、ブラーバとルンバとカチャカを並べて写真を撮ってみた写真が上。 […] カチャカでロボカップ2:カチャカが研究室にやってきた♪ (2024-2-21) - カチャカが研究室にやってきました♪ 2月14日(木)に注文して2月19日(火)に納品です。Amazonとはいきませんが、すぐ納品して頂き感謝です。 今回はオーダーしたのは次の3点で計¥252,560円(税込み)でした。 […]
カチャカでロボカップ2:カチャカが研究室にやってきた♪ (2024-2-21) - カチャカが研究室にやってきました♪ 2月14日(木)に注文して2月19日(火)に納品です。Amazonとはいきませんが、すぐ納品して頂き感謝です。 今回はオーダーしたのは次の3点で計¥252,560円(税込み)でした。 […] カチャカでロボカップ1:プロローグ♪ (2024-2-20) - RoboCup@Home Educationの運営を担当しているdemuです。RoboCup@Homeは家庭環境において、人の暮らしに役立つ生活支援ロボットの開発を目的としたプロジェクトです。 @Homeに参加するロボッ […]
カチャカでロボカップ1:プロローグ♪ (2024-2-20) - RoboCup@Home Educationの運営を担当しているdemuです。RoboCup@Homeは家庭環境において、人の暮らしに役立つ生活支援ロボットの開発を目的としたプロジェクトです。 @Homeに参加するロボッ […] WSL2(Ubuntu22.04)のインストール (2023-10-13) - ROS2 HumbleをWindows 11のWSL2 (Windows Subsytem for Linux) で使うため、Ubuntu22.04を指定してWSL2をインストールしたときのメモ。 環 境 Windows […] AIロボット入門2023:第1週 AIロボットをつくろう! (2023-10-1) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学ロボティクス学科3年次2023年後学期開講のロボットプログラミングⅡ(2単位)の第1週 AIロボットをつくろう […] AIロボット入門2023:Dockerイメージのダウンロードと使い方(Windows) (2023-10-1) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2023年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […] AIロボット入門2023:LXDEデスクトップ環境の使い方 (2023-10-1) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は,この本のDockerイメージが使っているUbuntuの軽量デスクトップLXDE (Lightwe […] AIロボット入門2023:Docker Desktop for Windowsのインストール (Windows11 Home) (2023-10-1) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2023年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […]
WSL2(Ubuntu22.04)のインストール (2023-10-13) - ROS2 HumbleをWindows 11のWSL2 (Windows Subsytem for Linux) で使うため、Ubuntu22.04を指定してWSL2をインストールしたときのメモ。 環 境 Windows […] AIロボット入門2023:第1週 AIロボットをつくろう! (2023-10-1) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の資料. 金沢工業大学ロボティクス学科3年次2023年後学期開講のロボットプログラミングⅡ(2単位)の第1週 AIロボットをつくろう […] AIロボット入門2023:Dockerイメージのダウンロードと使い方(Windows) (2023-10-1) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2023年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […] AIロボット入門2023:LXDEデスクトップ環境の使い方 (2023-10-1) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は,この本のDockerイメージが使っているUbuntuの軽量デスクトップLXDE (Lightwe […] AIロボット入門2023:Docker Desktop for Windowsのインストール (Windows11 Home) (2023-10-1) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2023年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […] PD実践2023:EV3RTプログラミング演習(センサ) (2023-9-27) - PD実践2023ではLEGO Mindstorms EV3にリアルタイムOS TOPPERS/EV3RTを入れて,C言語でロボットプログラミングを学びます.まずは,センサの使い方とそのプログラミングを学びま […]
PD実践2023:EV3RTプログラミング演習(センサ) (2023-9-27) - PD実践2023ではLEGO Mindstorms EV3にリアルタイムOS TOPPERS/EV3RTを入れて,C言語でロボットプログラミングを学びます.まずは,センサの使い方とそのプログラミングを学びま […] PD実践2023:プログラムのビルド・アップロード・実行 (2023-9-27) - 本記事は金沢工業大学ロボティクス学科2年次後学期PD実践の講義用です。 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして、 […]
PD実践2023:プログラムのビルド・アップロード・実行 (2023-9-27) - 本記事は金沢工業大学ロボティクス学科2年次後学期PD実践の講義用です。 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして、 […]