
拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の読者からシミュレータでのロボット初期姿勢について質問があったチャレンジ4.6:ドアオープン(p.117)について補足します.
このチャレンジを実施するには何らかの方法でロボットを郵便ポスト付近まで移動する必要があります.遠隔操縦ノードでロボットを移動させても良いですが,もっと簡単な方法はあります.それは,次の方法でロボットの初期姿勢を指定することです.
次のコマンドでTurtlebot3の家環境のシミュレータを起動します.
ros2 launch turtlebot3_gazebo turtlebot3_house.launch.py
この本のドッカー環境は標準で以下のhappy_miniのモデルを使っています.
/home/ubuntu/airobot_ws/src/happy_mini_turtlebot3_sim/turtlebot3_gazebo/worlds/turtlebot3_houses/happy_mini.model
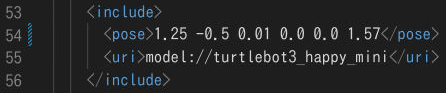
そのファイルの54行目を次のように変更するとトップの図やP118 図4.10の位置にロボットが配置されます.ここで,54行目の<pose>はロボットの姿勢を表し,始めの3要素は地図座標系の位置(x, y, z) [m],次の3要素は向き(roll, pitch, yaw) [rad]です.
happy_mini.modelを保存したら,次のコマンドを実行してください.トップ図のように表示されます.
cd ~/airobot_ws
colcon build
source install/setup.bash
ros2 launch turtlebot3_gazebo turtlebot3_house.launch.py
終わり
コメント