
拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です.
今回は, [第2章 はじめてのROS2] の2.4節はじめてのROS2プログラミングを説明します.
1.レクチャ
内 容
- 次の節を教科書に従って説明する.スライドは作成中.
- 2.4 はじめてのROS2プログラミング
- ワークスペースの作成
- 概要
- これからROS2でいろいろなプログラムを作る.ROS2ではプログラムをパッケージ(package)とよばれる単位で作成する.まずは,パッケージを保存する作業用のディレクトリ(フォルダ)を作成する.ROS2ではこれをワークスペース(workspace)とよびます.1つのワークスペースに好きな数だけのパッケージを作ることができる.端末でパッケージを使うためには,設定ファイルを反映する必要がある.
- はじめに、ROS2システムの設定ファイルを反映する.これから新規に作成するワークスペースのパッケージをビルドするために必要.このROSシステムの環境のことをアンダーレイ(underlay),これから新規に作成するワークスペースの環境をオーバーレイ(overlay)とよぶ.オーバーレイはアンダーレイをもとにした環境.
- 設定ファイルの実行
- 次のsourceコマンドでアンダーレイの設定ファイル/opt/ros/foxy/setpu.bashを実行する.sourceはファイルに書かれたコマンドを現在のシェルで実行するコマンド.
$ source /opt/ros/foxy/setup.bash
- 次のsourceコマンドでアンダーレイの設定ファイル/opt/ros/foxy/setpu.bashを実行する.sourceはファイルに書かれたコマンドを現在のシェルで実行するコマンド.
- ワークスペース用ディレクトリの作成
- 次のコマンドでワークスペースに使用するディレクトリ
workspace_nameを作成する.ディレクトリ名は何でもよいがcolcon_wsなどが良く使われる.教科書のDockerイメージにはairobot_wsが予め作成されている.演習用にはhappy_wsを使う.なお,先頭の$は入力を受け付けるコマンドプロンプトなので打つ必要はない.$ mkdir -p ~/workspace_name/src
- 次のコマンドでワークスペースに使用するディレクトリ
- 概要
- パッケージの作成
- 概要
- パッケージはあなたが作成したROS2コードの入れ物と考えることもできる.パッケージを使うことにより,あなたのROS2コードを簡単に公開したり,ビルドできるようになる.
- 種類
- ROS2ではビルドシステムとしてamentを使い,ビルドするツールとしてcolconを使う.CMakeまたはPythonを使ってパッケージを作成する.CMakeはソフトウェアをビルド,テストするツールでCやC++のビルドに使われる.
- 構成
- CMake:次のファイルが必須
- CMakeLists.txt:パッケージのコードをビルドする方法が書かれたファイル
- package.xml:パッケージに関するメタ情報が書かれたファイル
- Python
- setup.py:パッケージのインストールする方法が書かれたファイル
- setup.cfg:パッケージに実行可能ファイルがある場合に必要なファイル.ros2 runコマンドが実行可能ファイルを見つけるのに使う.
- package.xml:パッケージに関するメタ情報が書かれたファイル
- /package_nameパッケージと同じ名前のディレクトリ.ROS2のツールがパッケージに
__init__.pyがあるかを見つけるのに使う.
- CMake:次のファイルが必須
- 作成
- ディレクトリを移動する.
$ cd ~/workspace_name/src
- 次のros2 pkg createコマンドで名前が
package_nameのパッケージを作成する.なお,package_nameの前後についている<と>はその引数(この場合はpackage_name)が省略できなことを示している.- Python
$ ros2 pkg create --build-type ament_python <package_name>- なお,”
--node-name“のオプションをつけるとノードも作成できる(オススメ).$ ros2 pkg create --build-type ament_python --node-name <node_name> <package_name>
- Python
- ディレクトリを移動する.
- 概要
- ソースコードの作成
- ROS2のプログラムを作成する.典型的なROS2プログラムは次の処理をしている.
- 初期化
- rclpy.init(): ROS2通信のための初期化.ROS2ノード作成する前に呼び出さなければならない.
- ROS2ノードの作成
- 次のどちらかの方法で作成する.通常は後者を選ぶ.
- rclpy.create_node()関数を呼び出す
- Nodeクラスからインスタンスを作成する
- 次のどちらかの方法で作成する.通常は後者を選ぶ.
- ノードの処理(コールバック関数を使う場合が多い)
- 次の関数でノードを処理を実行する.
- rclpy.spin():処理を実行して,ノードが終了するまでブロックする.
- rclpy.spin_once():処理を1回実行するか,タイムアウトの期限までウェイトする.
- 次の関数でノードを処理を実行する.
- 終了処理
- rclpy.destroy_node():ノードを破壊する.
- rclpy.shutdown():終了処理をする.
- なお、簡単に説明した初期化や終了処理のAPIは以下のリンクで詳細がわかる.
- 初期化
- ROS2のプログラムを作成する.典型的なROS2プログラムは次の処理をしている.
- ビルド
- ROS2ではビルドツールにcolconを使う.
- ビルドするためにworkspace_nameディレクトリに移動する.
$ cd ~/workspace_name
- 次のcolconコマンドでビルドする.このコマンドではワークスペースにある全てのパッケージをビルドする.
$ colcon build
- ビルドするためにworkspace_nameディレクトリに移動する.
- 便利なオプション
- packages-select:1つのパッケージmy_packageだけビルドしたいときはこのオプションをcolcon buildの後に付けてビルドする.
$ colcon build --packages-select my_package
- symlink-install:可能な場合,ファイルをコピーする代わりにシンボリックリンク(Windowsのショートカット)でインストールする.Pythonの場合は、これによりソースコードを改変しても再ビルドが不要になるお勧めのオプション.
$ colcon build --symlink-install
- packages-select:1つのパッケージmy_packageだけビルドしたいときはこのオプションをcolcon buildの後に付けてビルドする.
- ワークスペースで初めてビルドすると~/workspace_nameディレクトリにbuild,install,logディレクトリが作成される.
- ROS2ではビルドツールにcolconを使う.
- 設定ファイルの実行
- アンダーレイ設定ファイルの実行
$ source /opt/ros/foxy/setup.bash
- オーバーレイ設定ファイルの反映.作成したワークスペースの設定ファイルを実行する.これにより,あなたのワークスペースがパスに追加されるので,パッケージの実行可能ファイルを使えるようになる.
$ source ~/workspace_name/install/setup.bash
- アンダーレイ設定ファイルの実行
- ノードの実行
-
- 次のros2 runコマンドで,パッケージ名package_name,ノード名node_nameを実行する.
$ ros2 run <package_name> <node_name>
- 次のros2 runコマンドで,パッケージ名package_name,ノード名node_nameを実行する.
-
2.ハンズオン
では、ワークスペース作成からパッケージ作成と実行までの一連の流れを体験しょう!この例ではワークスペース名をhappy_ws、Pythonパッケージとしている.なお,自動生成されるソースコードは端末に”Hi from hello”と表示されるだけでROS2ノードを作成しているわけではない.
- ワークスペースの作成と移動
$ mkdir -p ~/happy_ws/src$ cd ~/happy_ws/src
- アンダーレイ設定ファイルの実行
$ source /opt/ros/foxy/setup.bash
- パッケージとノードの作成.
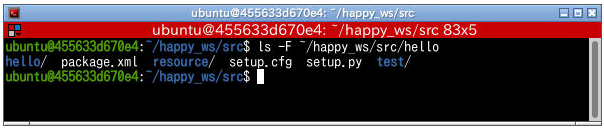
--node_nameオプションをつけると”Hi from hello.”と端末に出力するソースコードが自動生成される.ここではノード名をhello_node、パッケージ名をhelloにする.$ ros2 pkg create --build-type ament_python --node-name hello_node hello- パッケージがうまく作られたか確認しよう.次のディレクトリにあるファイル名を表示するlsコマンドを実行して,下図のようにhello,resource,testディレクトリとpackage.xml,setup.cfg,setup.pyファイルができていれば成功.lsコマンドに-Fオプションをつけているので,ディレクトリの場合は最後に/がついて表示される.
$ ls -F ~/happy_ws/src/hello
- ビルド
- ビルドの際はワークスペースのトップディレクトリに移動しなければならない.そのディレクリに移動してcolcon buildコマンドでビルドする.
$ cd ~/happy_ws$ colcon build
- ビルドの際はワークスペースのトップディレクトリに移動しなければならない.そのディレクリに移動してcolcon buildコマンドでビルドする.
- オーバーレイ設定ファイルの実行
$ source install/setup.bash
- ノードの実行
- 自動生成されるソースコードはROS2ノードを作成していないのでノードの実行ではないが,ROS2ノードを実行するコマンドは次のとおり.
$ ros2 run hello hello_node
- 問題がなければ次のように端末に表示される.
- Hi from hello.

- Hi from hello.
- 自動生成されるソースコードはROS2ノードを作成していないのでノードの実行ではないが,ROS2ノードを実行するコマンドは次のとおり.
- 自動生成されたソースコードの確認
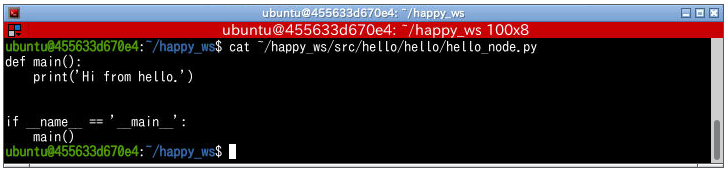
- では、”Hi from hello.”と表示する自動生成されたソースコードを見てみよう.次のコマンドを打ち込むと端末に下図のように表示される.ここで,catは猫ではなくファイルの中身を端末に表示するコマンド.端末にprint文で”Hi from hello.”と表示する簡単なソースコードだとわかる.
$ cat ~/happy_ws/src/hello/hello/hello_node.py
- では、”Hi from hello.”と表示する自動生成されたソースコードを見てみよう.次のコマンドを打ち込むと端末に下図のように表示される.ここで,catは猫ではなくファイルの中身を端末に表示するコマンド.端末にprint文で”Hi from hello.”と表示する簡単なソースコードだとわかる.
- 少しハッピーになる設定
- 毎回、アンダーレイとオーバーレイの設定ファイルを実行するのは面倒なので次のコマンドを実行して.bashrcに追記する.
$ echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc$ echo "source ${HOME}/happy_ws/install/local_setup.bash" >> ~/.bashrc
- 毎回、アンダーレイとオーバーレイの設定ファイルを実行するのは面倒なので次のコマンドを実行して.bashrcに追記する.
3.参考リンク
終わり
コメント