
拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です.
今回は, [第2章 はじめてのROS2] の2.1節から2.3節の説明並びにハンズオンを行います.
1.レクチャ
- 次の節を教科書に従って説明するか,読んでもらう.スライドは作成中.
- 2.1 ROS2の基礎知識
2.ハンズオン:亀で遊ぼう!(内容はAIロボット入門とは少し異なります)
turtlesim
- 準備
- 次の説明に従ってDockerコンテナai_robot_bookをスタートさせ,デスクトップ環境を起動する.
- 実行
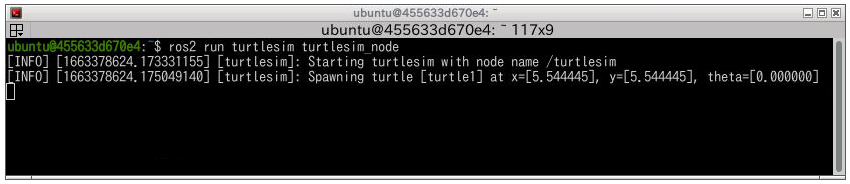
- では、端末を開き、次のコマンドでturtlesimを起動しましょう。
$ ros2 run turtlesim turtlesim_node
- では、端末を開き、次のコマンドでturtlesimを起動しましょう。
-
- 端末には次のようにturtlesimのノード名/turtlesim、亀の名前 [turtle1]、姿勢(x, y, theta)が表示される。ノードはROSの実行中のプログラムで、Spawningのspawnは魚や蛙などが卵を生む意味であり、コンピュータゲームでキャラクタが登場する意味でも使われる。ここでは亀だけに2つをかけているのでしょうね。
-
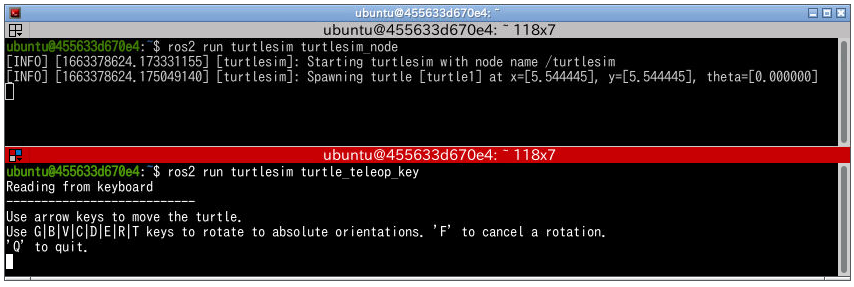
- 端末を分割し,下の端末で次のコマンドでキー操作により亀を動かしましょう。次のコマンドでrunがノードを実行するコマンドで、turtlesimがパッケージ名、最後のturtle_teleop_keyが実行可能ファイル。
$ ros2 run turtlesim turtle_teleop_key
- 端末には下図のように表示される。矢印キーで亀を動かすことができる。さっそく、矢印キーを押して亀を動かしてみましょう!亀が動くと動いた軌跡が白線で表示される。
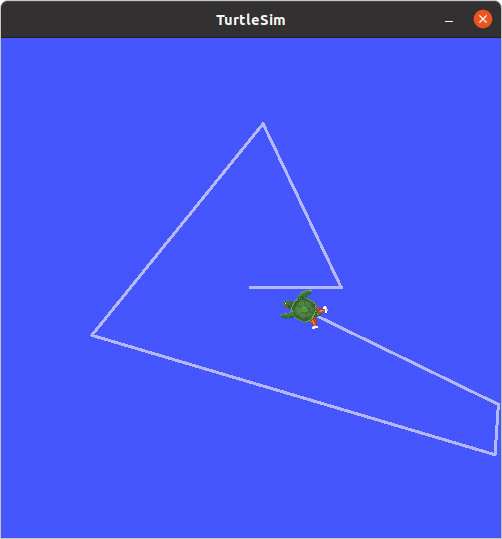
- 端末を分割し,下の端末で次のコマンドでキー操作により亀を動かしましょう。次のコマンドでrunがノードを実行するコマンドで、turtlesimがパッケージ名、最後のturtle_teleop_keyが実行可能ファイル。
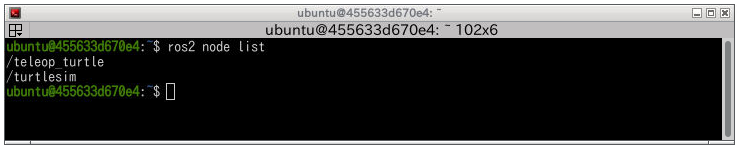
- 端末をもう一つ起動し,現在、実行されているノードを次のコマンドで確認しよう。ros2 runコマンドで実行したteleop_turtleとturtlesimノードが実行されていることがわかる。
$ ros2 node list
GUIアプリRQt
- 起動
- 端末を開き、次のコマンドを実行する。次の空白のウインドウが開く。
$ rqt
- 端末を開き、次のコマンドを実行する。次の空白のウインドウが開く。
- 使い方
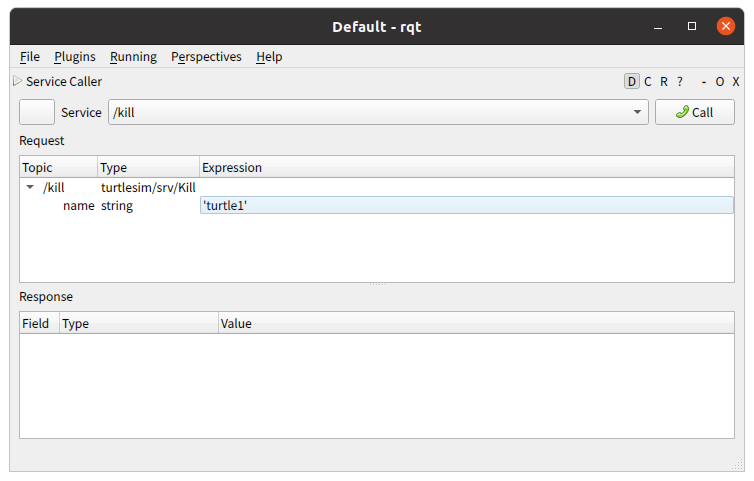
- /killサービス:亀を消す/killサービスを実行しましょう。rqtのメニューPlugins→Services→Service callerをクリックすると色々なサービスが出てくる。その中の[/kill]を選択する。下図のように[Expression]を’turtle1’にして、右上の[Call]をクリックする。亀と軌跡の白線が消える。
- /resetサービス:次にリセットをする/resetサービスを同様にrqtのメニューPlugins→Services→Service callerから選択して[Call]をクリックして実行する。次のようにまた、turtle1が画面中央に現れる。端末には次のようにturtlesimがリセットされたことと、turtle1の姿勢が表示される。

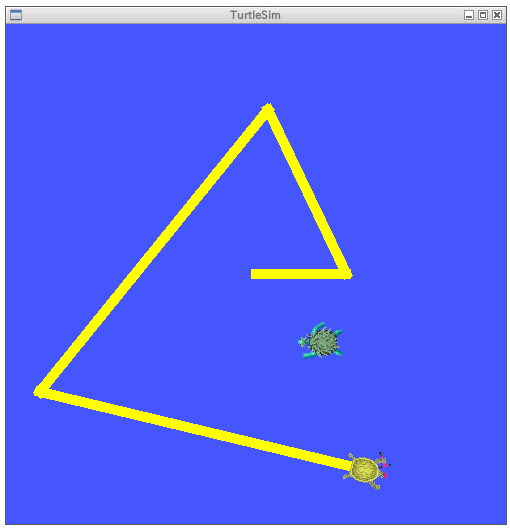
- /spawnサービス:新しい亀を生成する/spawnサービスを実行しましょう。同様にして、rqtのメニューPlugins→Services→Service callerを選択して、/spawnサービスを選択する。次のように設定して、[Call]をクリックして新しい亀を誕生させましょう。下図のように中央より少し右下に新しい”kame”が誕生する。
- x: 7.0
- y: 4.0
- theta: 3.14
- name: ‘kame’
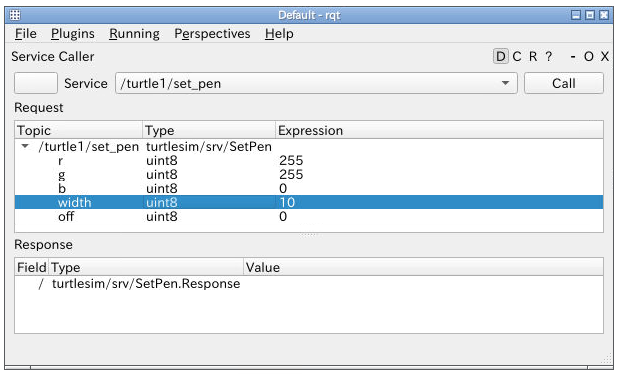
- /set_penサービス:軌跡の色を変更する/set_penサービスを使ってみよう。[Service]を”/turtle1/set_pen”を選ぶ。turtle1がない場合は[Service]の左の[ボタン]をクリックする。黄色で線の太さ10になるようにExpressionを次のように変更する。では、上で亀を動かしたようにturtle_teleop_keyノードを使って、適当に亀を動かして軌跡の色と太さが変わるのを確認する。
- r: 255
- g: 255
- width: 10
- /clearサービス:亀の軌跡を消す。上と同様に[Service]の/clearを選び,[Call]ボタンをクリックすると黄色の軌跡が消える.

- /killサービス:亀を消す/killサービスを実行しましょう。rqtのメニューPlugins→Services→Service callerをクリックすると色々なサービスが出てくる。その中の[/kill]を選択する。下図のように[Expression]を’turtle1’にして、右上の[Call]をクリックする。亀と軌跡の白線が消える。
- リマップ
- トピック名を付け替えるリマップを使い、先程動かしたturtle_teleop_keyを使って新しく生成したkameを動かしてみましょう。新しい端末を開き次のコマンドを実行する。
$ ros2 run turtlesim turtle_teleop_key --ros-args --remap turtle1/cmd_vel:=kame/cmd_vel
- トピック名を付け替えるリマップを使い、先程動かしたturtle_teleop_keyを使って新しく生成したkameを動かしてみましょう。新しい端末を開き次のコマンドを実行する。
- 終 了
- では、turtlesimを終了させましょう。TurtleSimウインドウの[☓]をクリックするか、起動した端末でCtrl-C(コントロールキーを押しながらCキーを押す)を押すとノードが終了する。turtle_teleop_keyノードを終了させるときは、それを実行した端末でCtrl-Cを押すか、qキーを押す。
- 今回のハンズオンはこれで終わりです。お疲れ様!
3.ホームワーク
- ROSのマスコットや2次元シミュレータは何故,亀なのでしょうか?
- チャレンジ2.1 (P34)
- チャレンジ2.2 (P39)
- チャレンジ2.3 (P41)
4.参考リンク
終わり
コメント