
なお,本講義では簡単のために,Windows環境で,升谷先生が作られたこの本用のDockerイメージを使います.今回は,すでに[AIロボット入門2022: Docker Desktop for Windowsのインストールと使い方(Windows)]の作業を終え,ai_robot_bookのコンテナを作成済みの方を対象に,この本用のDockerイメージの使い方を説明します.Linux環境での使い方は参考資料1をご覧ください.本資料は参考資料やTwiiterの投稿(#AIロボット入門)をもとに作成しました.
参考資料
- Dockerイメージ使い方:https://github.com/AI-Robot-Book/chapter1/tree/main/docker
- この本のDockerイメージ:https://github.com/AI-Robot-Book/docker-ros2-desktop-ai-robot-book
- TiryohさんのDockerイメージ:https://github.com/Tiryoh/docker-ros-desktop-vnc
この本用Dockerイメージ
- 作成者:大阪電気通信大学 升谷保博 教授
- TiryohさんのDockerイメージ(docker-ros-desktop-vnc)にインスパイアされ,ROS2 Foxy,教材全部入りデスクトップ環境をDockerイメージで提供することになる.Tiryohさんのイメージとは以下の点が異なる.サイズが10GBあるが,ちょっと便利なROS2デスクトップ環境として利用可能.
- Ubuntu20.04を日本語化(日本語入力OK)
- VSCodiumインストール済(VS Codeのオープンソース版)
- サンプルプログラムに必要なライブラリ・パッケージをインストール済
- サンプルプログラムがすぐに実行可能.
- 音声入出力付きRDPサーバにもなる.
環 境
- 次はテスト済みの環境.Windows11やWindows10 Pro, Enterprize, Educationは動くと思うが試せていない.そのような環境で動いた場合,コメント頂けたらハッピーです.
- Windows10 Home バージョン 21H2
- Docker Desktop for Windows:4.12.0
事前作業
- 次の作業を事前に済ませることが必要.
使い方
- Docker Desktopの起動
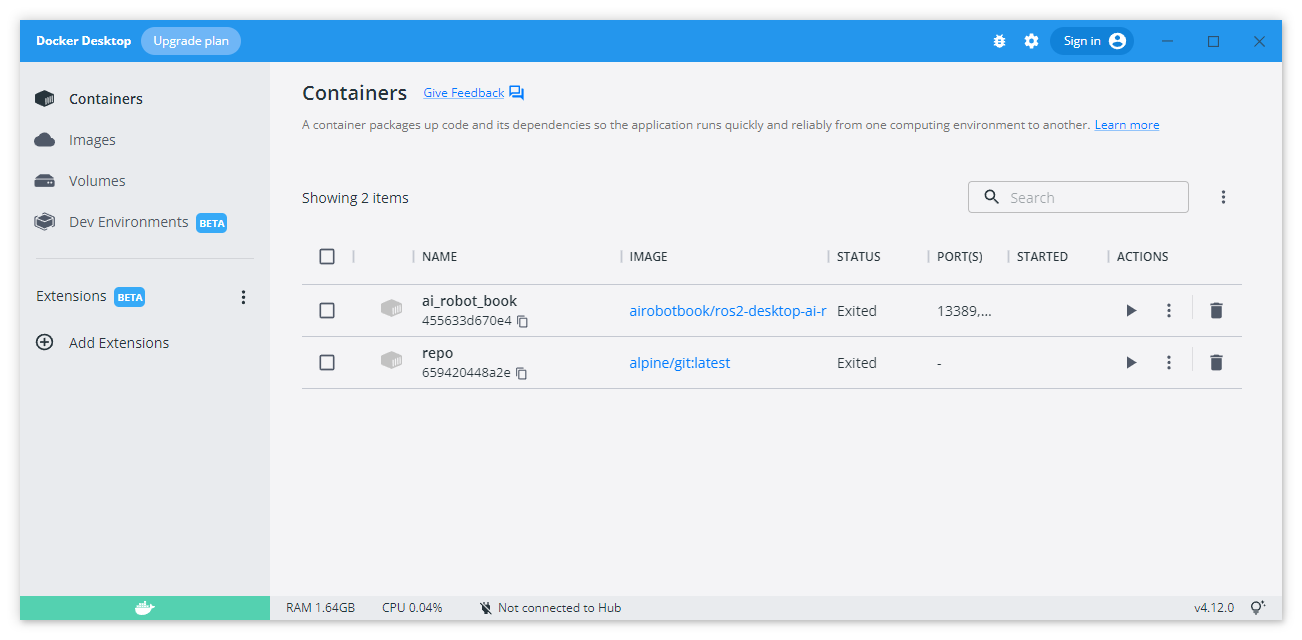
- デスクトップの鯨アイコンDocker Desktopをダブルクリックする.次のウインドウが開き,ステータスバーに鯨アイコンが表示されればOK.
-
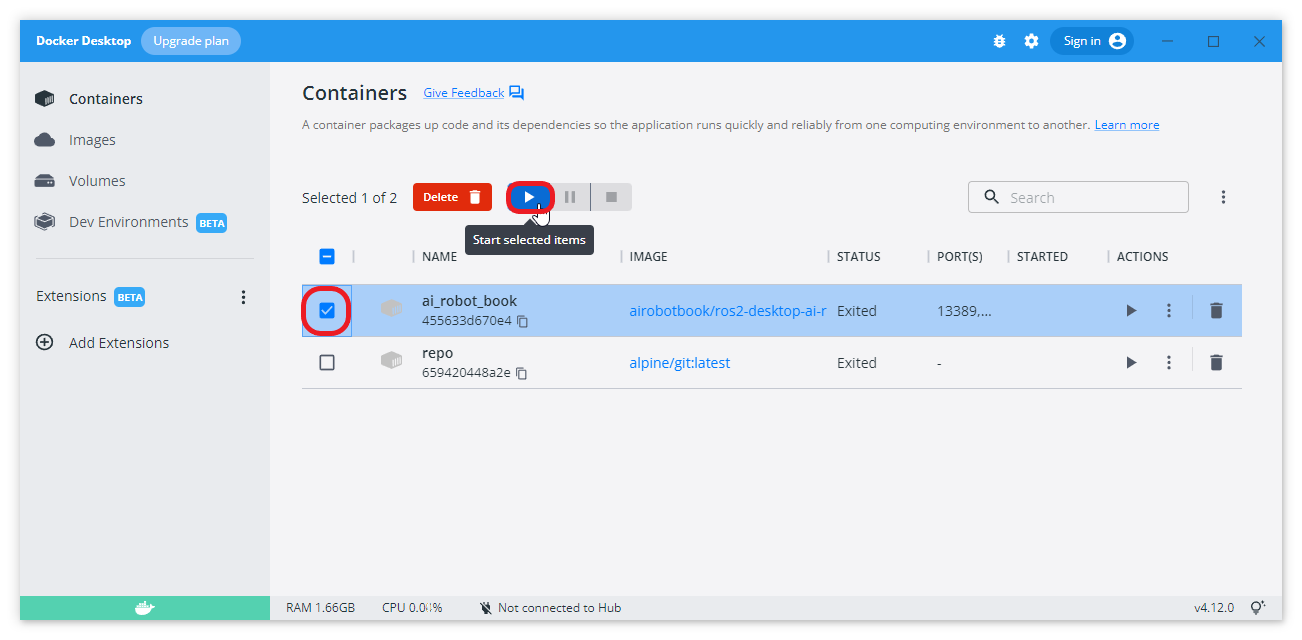
- ai_robot_bookコンテナにチェックを入れて,[Start]ボタンをクリックして,コンテナを起動する.
-
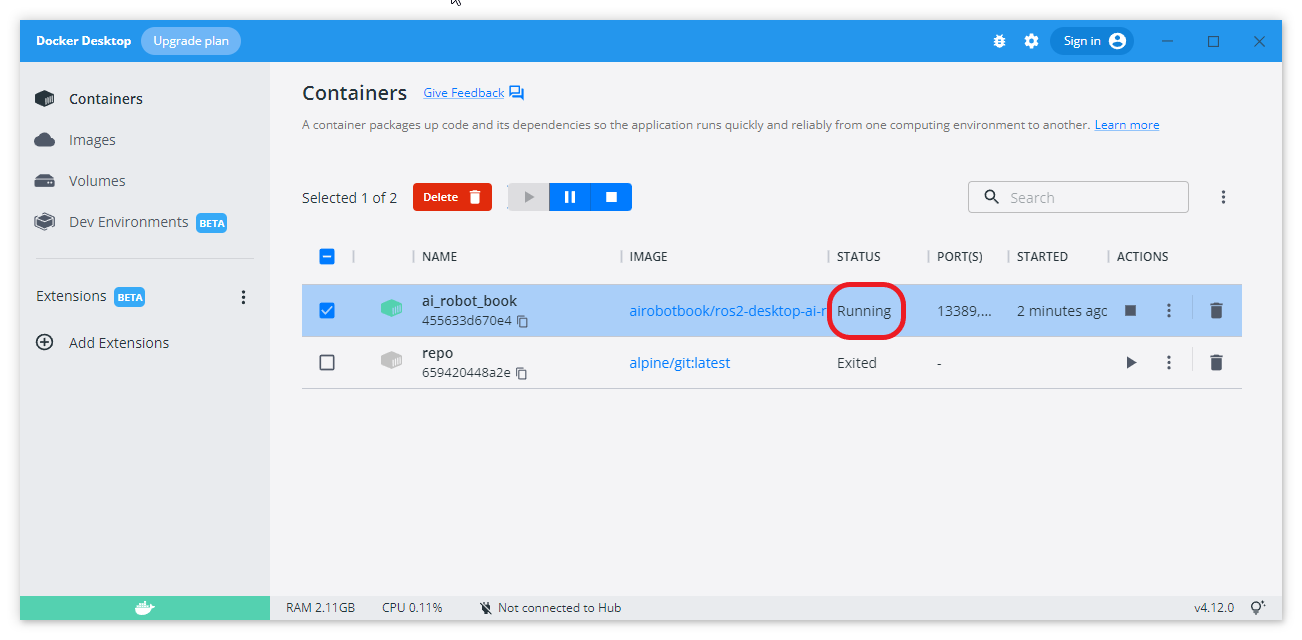
- コンテナが起動すると,STATUSがRunningになる.これで準備がOK.
- ウェブブラウザの起動
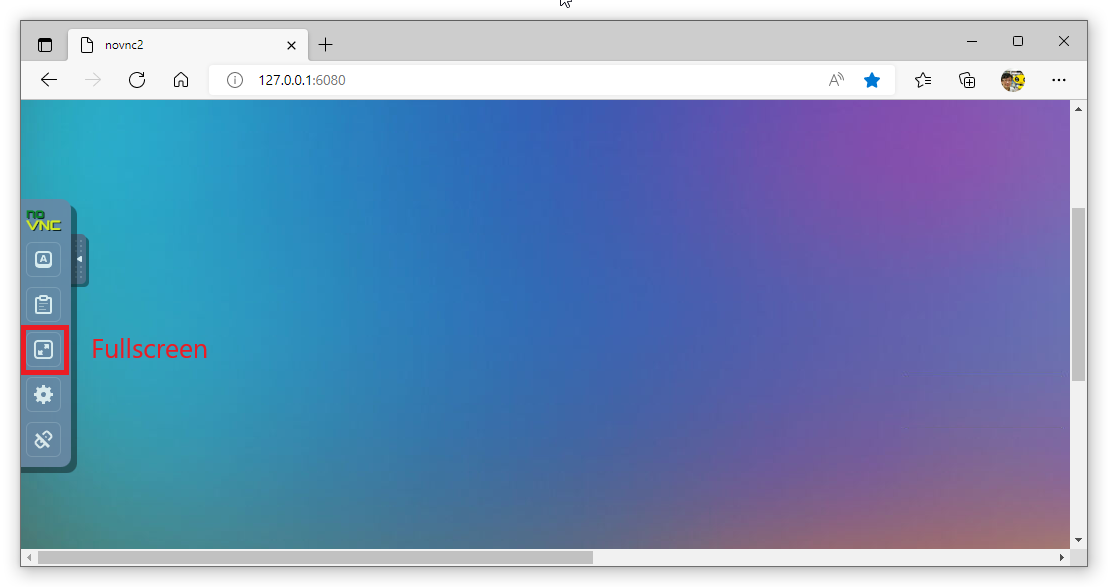
- 以下のリンクをクリックすると,ウェブブラウザ内に以下のような画像が表示される.ウェブブラウザが起動しない場合は,手動でウェブブラウザを起動し,以下のアドレスをアドレス欄に入力する.何でもよいがここでは,Windows標準搭載のMicrosoft Edgeを使う.毎回この作業をするのは面倒なのでブックマークを作り,次回はブックマークから起動する.

- デスクトップ環境の全画面化
- このDockerイメージで使用しているデスクトップ環境はLXDEと呼ばれるもので,Windowsと同じように画面の下辺にスタートボタンやアイコンが表示される.このままでは使いづらいので,画面左辺にあるコントロールバーのタブ(上図参照)をクリックしてnoVNCメニューを表示する.下図赤枠の[Fullscreen]アイコンをクリックして全画面化する.
-
- そうすると全画面に表示され,画面下端のスタートボタン等にアクセス可能となる.
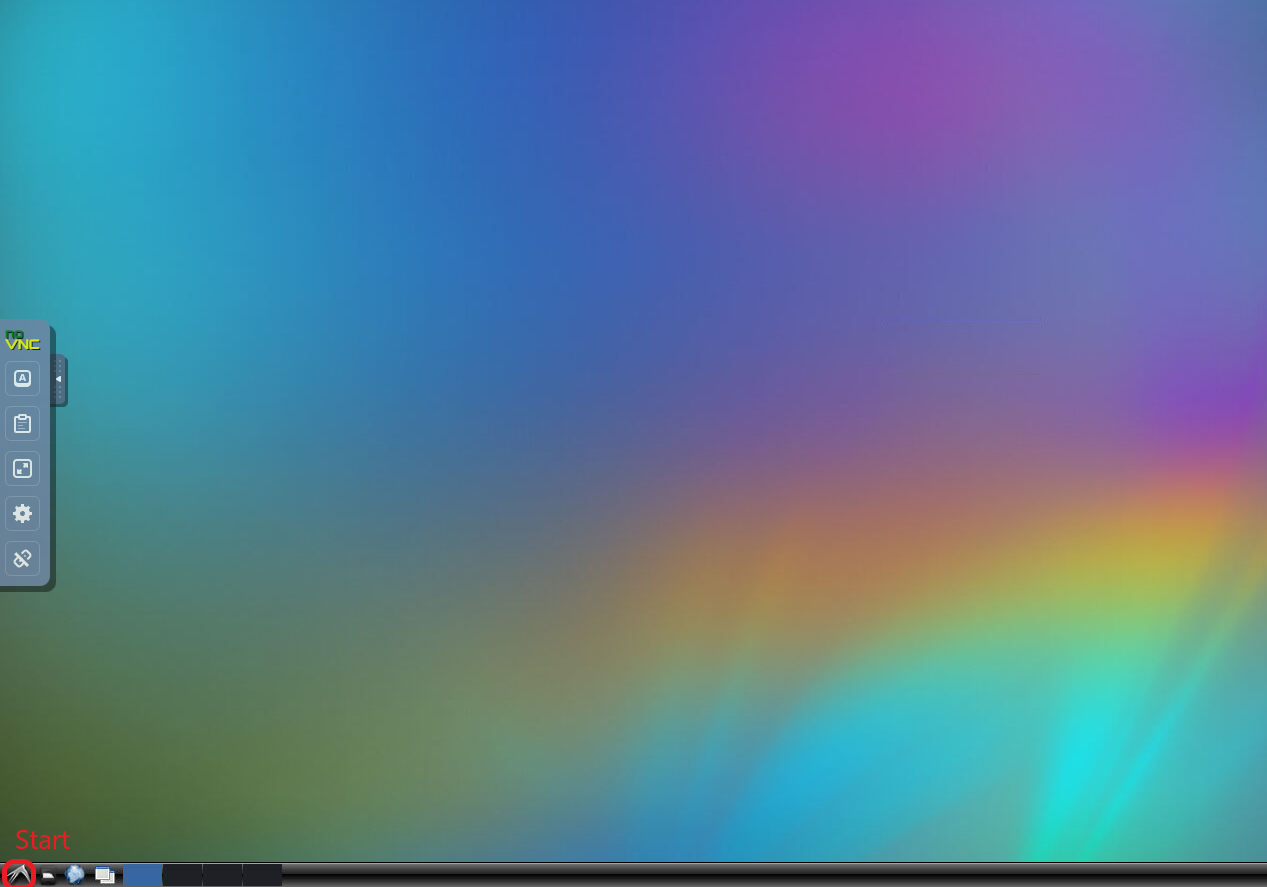
- アプリケーションの起動法
- Windowsと同じ要領.左下の[Start]ボタンから各種アプリケーションを起動可能.簡単ですね.
- 端末:Terminator
- スタート→システムツール→Terminator
- エディタ:VSCodium
- スタート→プログラミング→VSCodium
- ウェブブラウザ:Firefox
- スタート→インターネット→Firefox ウェブ・ブラウザ

-
- これで準備完了.次回からAIロボット入門のサンプロプログラムを動かしていきましょう!
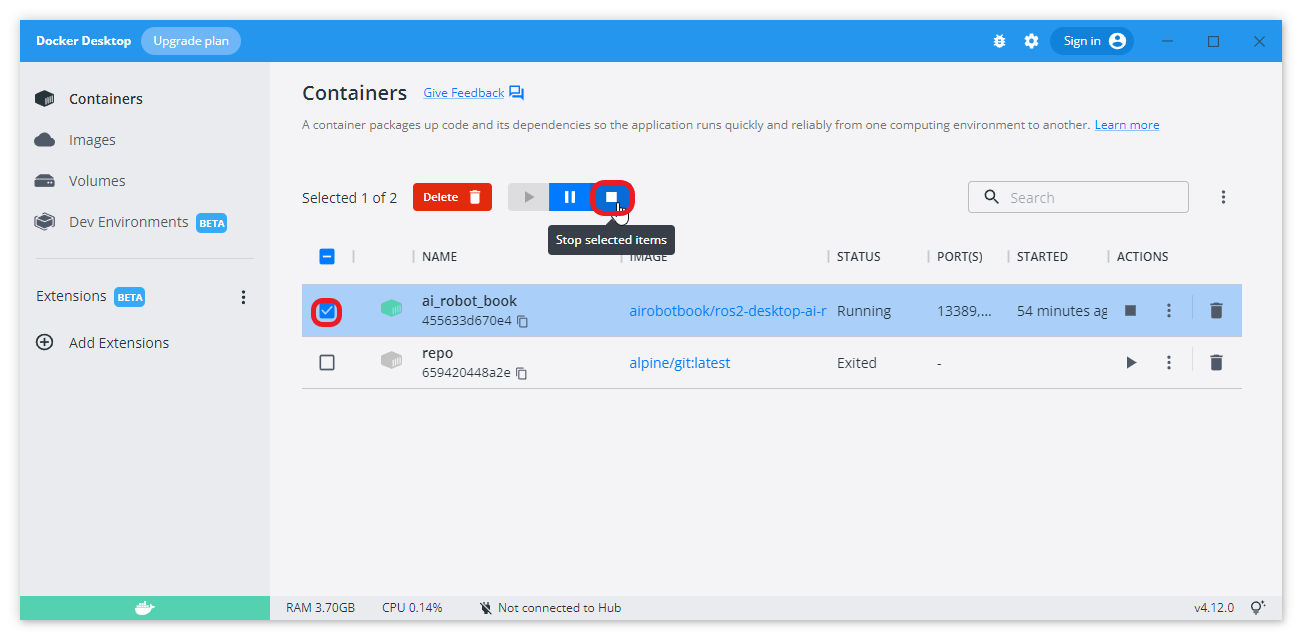
- Docker Desktopの終了
- 起動の逆手順.ai_robot_bookコンテナにチェックを入れて,[Stop]ボタンをクリックして,コンテナを停止する.
-
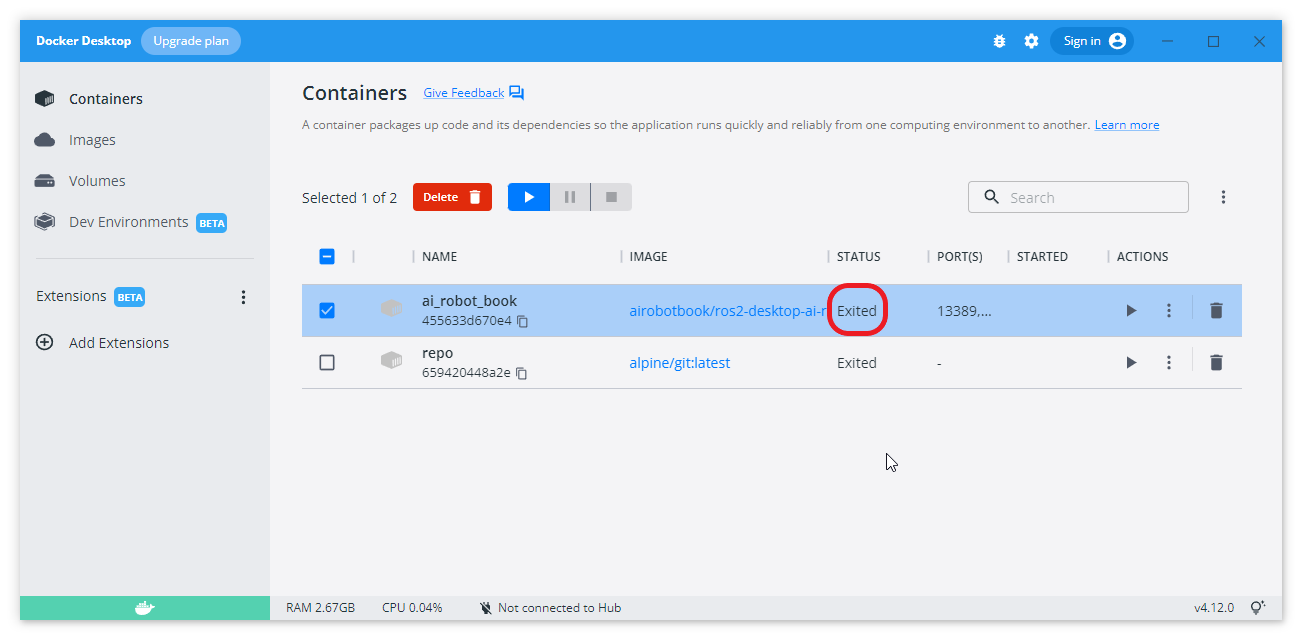
- コンテナが停止すると,STATUSがExitedになる.
-
- Windows右下のステータスバーにある鯨アイコンを右クリックする.
.
-
- メニューが表示されるので,[Quit Docker Desktop]を選択するとDocker Desktopが終了する.

終わり
コメント
著書を拝読し、ROS2やAIについて楽しく学んでおります。
質問なのですが、3.1章音声認識で、p85の”ros2 run speech_service recognition”コマンドをairobot_ws下で実行すると、”cannot find card ‘0’”でエラーとなりました。サウンドカードが認識されていない様なのですが、どのように対処すべきでしょうか。よろしければ教えていただきたいです。
※なお、[AIロボット入門2022: Docker Desktop for Windowsのインストールと使い方(Windows)]の作業を終え,ai_robot_bookのコンテナを作成済みです。
ご購入ありがとうございます.音声認識は私の担当ではないので,大変お手数ですが以下のフォームからお問い合わせいただけないでしょうか.
よろしくお願いします。
https://t.co/unTAYZ8Vr7