
JETSON TX2: JETPACK3.0インストール後の作業 (2017-6-25) - Jetson TX2にJetPack3.0をインストールした後の作業メモ ユーザの作成 System Settings -> User Accounts でMy Accountsを作る。この例ではアカウント名をここ […]
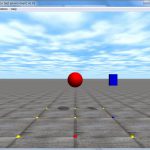
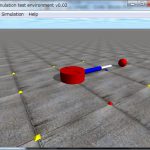
 物理エンジンODEで学ぶC言語2017 [STEP3:関数]動力学計算 (2017-6-23) - ODEで学ぶC言語のStep3です.今回は私がODEのAPIを元に作成した関数を使い,赤い球を落下させるプログラムを説明します. 今までのプログラムでは描画だけでしたが,今回からシミュレーションやゲームを作るために必要な […]
物理エンジンODEで学ぶC言語2017 [STEP3:関数]動力学計算 (2017-6-23) - ODEで学ぶC言語のStep3です.今回は私がODEのAPIを元に作成した関数を使い,赤い球を落下させるプログラムを説明します. 今までのプログラムでは描画だけでしたが,今回からシミュレーションやゲームを作るために必要な […]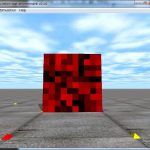 物理エンジンODEで学ぶC言語2017 [Step2:switch文]キーボード操作 (2017-6-16) - 今回は、switch文を使ったキー処理の方法を学びます.キーボード入力の処理にswitch文はうってつけです。 ゲームではキーボード入力によりレーザービームを発射したり,車を操縦しますね.switch文を使って,キーボー […]
物理エンジンODEで学ぶC言語2017 [Step2:switch文]キーボード操作 (2017-6-16) - 今回は、switch文を使ったキー処理の方法を学びます.キーボード入力の処理にswitch文はうってつけです。 ゲームではキーボード入力によりレーザービームを発射したり,車を操縦しますね.switch文を使って,キーボー […]JETSON TX2: Tensorflow-1.1.0のインストール (2017-6-10) - JETSON TX2にtensorflow1.1.0をインストールしたときのメモ。JetsonHacksの”TensorFlow on NVIDIA Jetson TX2 Development Kit […]
 JETSON TX2: JetPack3.0のインストール (2017-6-10) - Jetson TX2へJetPack3.0をインストールしたときのメモ。TX1にインストールしたときとほぼ同じ。キャプチャ画面はTX1インストール時のものも利用しているので、TX1とあったらTX2と読み替えてください。 […]
JETSON TX2: JetPack3.0のインストール (2017-6-10) - Jetson TX2へJetPack3.0をインストールしたときのメモ。TX1にインストールしたときとほぼ同じ。キャプチャ画面はTX1インストール時のものも利用しているので、TX1とあったらTX2と読み替えてください。 […]JETSON TX2: DIGITS5.0とCaffeを入れる (2017-6-10) - JETSON TX2: DIGITS5.0とCaffeを入れたときのメモ DIGITSのインストール ソースから次のインストールする。https://github.com/NVIDIA/DIGITS/blob/maste […]
 物理エンジンODEで学ぶC言語2017[Step1:物体の描画] (2017-6-9) - 物理エンジンODEを使い,ゲームを作りながらC言語をマスターすることを目指して連載します。ODEのバージョンは0.13に対応しています。なお、KITロボティクス学科の講義「コンピュータ工学Ⅰ」と連動しており […]
物理エンジンODEで学ぶC言語2017[Step1:物体の描画] (2017-6-9) - 物理エンジンODEを使い,ゲームを作りながらC言語をマスターすることを目指して連載します。ODEのバージョンは0.13に対応しています。なお、KITロボティクス学科の講義「コンピュータ工学Ⅰ」と連動しており […] Jetson TX1 :JetPack3.0のインストール (2017-4-5) - Jetson TX1へJetPack3.0をインストールしたときのメモ。 ホストPC環境 ThinkPad T450 CPU: Intel i7-5500U GPU: nvidia 940m, moemory 1GB x […]
Jetson TX1 :JetPack3.0のインストール (2017-4-5) - Jetson TX1へJetPack3.0をインストールしたときのメモ。 ホストPC環境 ThinkPad T450 CPU: Intel i7-5500U GPU: nvidia 940m, moemory 1GB x […]Jetson TX1: JetPack3.0インストール後の作業 (2017-4-5) - Jetson TX1にJetPack3.0をインストールした後の作業メモ ユーザの作成 System Settings -> User Accounts でMy Accountsを作る。この例ではアカウント名をこ […]
 RoboCup2017世界大会@Homeリーグへ出場します! (2017-3-28) - happy miniチームがRoboCup2017世界大会@Home オープンプラットフォームリーグへの出場権を獲得しました。happy miniチーム(昨年まではdemura.netチーム)は金沢工業大学夢考房Robo […]
RoboCup2017世界大会@Homeリーグへ出場します! (2017-3-28) - happy miniチームがRoboCup2017世界大会@Home オープンプラットフォームリーグへの出場権を獲得しました。happy miniチーム(昨年まではdemura.netチーム)は金沢工業大学夢考房Robo […]リアルタイム物体検出DNNのYOLO v2で少しはまる (2017-3-10) - facebookで先日、話題になっていた世界最先端の実時間物体検出DNN(Deep Neural Network)のYOLO v2 (real time object detection)を試したときのメモ。Cudaの […]
ThinkPad T450 (Nvidia 940m)にXubuntu14.04.5とCuda7.5を入れたときのメモ (2017-3-10) - ThinkPad T450にXubuntu14.04.5, Cuda7.5インストールしたときのメモ。 T450はNvidia 940mと Intel HD 5500のGPUを搭載しており、NVIDIAのOPTIMUSテ […]
音声認識エンジンKaldiでTED学習済みのDNNモデルを使うためのメモ (2017-3-3) - 音声認識エンジンKaldiは音響モデルにDNN-HMMモデルも使えます。RoboCup@Home2016世界大会ではTED学習済みDNNモデルを使いました。この記事はそのメモ。 環境 ThinkPad T450 (CPU […]
Kinect V2 + Ubuntu14.04 メモ (2017-2-9) - Kinect V2をUbuntu14.04で使用する設定をしたときのメモ。 カーネル3.16以上、USB3.0必須。 libfreenect2とiai_kinect2が必要。 OpenCLのインストールで少しはまったので […]
numpyメモ:列の挿入 (2017-2-1) - numpyのメモ.行列に要素が全て1の列ベクトルを挿入 >>>import numpy as np >>>X = np.array([[1,2],[3,4],[5,6]]) >>>print X [[1 2] [3 4 […]
 ROS演習9:ロボットアームと位置センサ (2016-12-23) - 今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。 位置センサ用プラグインの追加 gazeboのロボットモデルに位置センサを取り付けるために、~/catkin_ […]
ROS演習9:ロボットアームと位置センサ (2016-12-23) - 今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。 位置センサ用プラグインの追加 gazeboのロボットモデルに位置センサを取り付けるために、~/catkin_ […] ROS演習8:ロボットアーム (2016-12-8) - 今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照してください。このサンプルでは参考リンクのrrbot.xacroをベースに作っています。 ソース […]
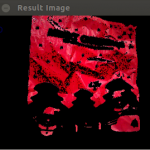
ROS演習8:ロボットアーム (2016-12-8) - 今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照してください。このサンプルでは参考リンクのrrbot.xacroをベースに作っています。 ソース […] ROS演習7:ロボットビジョン (cv_bridge) (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。今回はcv_bridgeを使います。ROSでOpenCVを使いgazeboシミュレータのRGB-Dセンサから取得した画像から赤色の抽出とエッジ抽出を行います。 […]
ROS演習7:ロボットビジョン (cv_bridge) (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。今回はcv_bridgeを使います。ROSでOpenCVを使いgazeboシミュレータのRGB-Dセンサから取得した画像から赤色の抽出とエッジ抽出を行います。 […]ROS演習6:シンプルなゴール(ActionLib) (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。今回はActionLibを使った以下のROSチュートリアルを実行しましょう。 SendingSimpleGoals ソース // 本プログラムは // htt […]
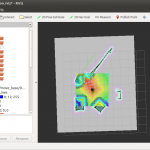 ROS演習5:地図作製・自己位置推定(SLAM, AMCL) (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。今回は地図作成(SLAM)と自己位置推定(AMCL)のパッケージを使いロボットにナビゲーションをさせましょう! 本記事を以下のチュートリアルを参考にしています […]
ROS演習5:地図作製・自己位置推定(SLAM, AMCL) (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。今回は地図作成(SLAM)と自己位置推定(AMCL)のパッケージを使いロボットにナビゲーションをさせましょう! 本記事を以下のチュートリアルを参考にしています […] ROS演習4:双方向通信しよう!(サービス) (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。今回はROSのサービスを理解しましょう。次のROS Wikiを参考にしています。 C++でシンプルなサービスとクライアントを書く シンプルなサービスとクライア […]
ROS演習4:双方向通信しよう!(サービス) (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。今回はROSのサービスを理解しましょう。次のROS Wikiを参考にしています。 C++でシンプルなサービスとクライアントを書く シンプルなサービスとクライア […] ROS演習3:シミュレータを動かそう (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。シミュレータGAZEBOを使い、Turtlebotを動かします。次のROS Wikiを参考にしています。 turtlebot/Tutorials 1. Tu […]
ROS演習3:シミュレータを動かそう (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。シミュレータGAZEBOを使い、Turtlebotを動かします。次のROS Wikiを参考にしています。 turtlebot/Tutorials 1. Tu […]ROS演習2:はじめてのROSプログラミング (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。ROSでHellow Worldと表示するプログラムを作り、ビルドして実行してみましょう。この記事は以下のROS Wikiの記事を参考にしています。 ROSパ […]
 ROS演習1:亀を動かす (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。ROSをインストールしたので、動作確認を兼ねて亀で遊んでみましょう。この記事は以下の記事を参考にしています。 ROSトピックの理解 —— […]
ROS演習1:亀を動かす (2016-11-11) - この記事は私が担当している講義ロボットプログラミングⅡ用です。ROSをインストールしたので、動作確認を兼ねて亀で遊んでみましょう。この記事は以下の記事を参考にしています。 ROSトピックの理解 —— […]ロボットプログラミングⅡ-2016 環境設定 (2016-9-23) - この記事は私が担当している講義ロボットプログラミングⅡ用です。 ロボットプログラミングⅡでは、フレームワークとしてROSロボットシミュレータとしてGAZEBOを使用します。インストールは次の手順です。Panasonic […]
RoboCup2016世界大会報告会7月29日(金)17時~ (2016-7-20) - RoboCup2016世界大会報告会を以下の予定で実施します。今、ロボット業界が注目しているRoboCup、その中でも一番ホットなのが@Homeリーグです。学生が世界大会に参加して何を見て、感じ、得たものは何か。学生の皆 […]
RoboCup2016世界大会8位でした! (2016-7-16) - 6月28日から7月4日までドイツのライプチヒ市で開催されたRoboCup2016世界大会に出場した金沢工業大学demura.netチームが@Homeリーグで23チーム中8位の成績を収めました。 RoboCup世界大会は人 […]
 物理エンジンODEで学ぶC言語 [STEP6:補講] ジョイントの生成と制御 (2016-7-13) - ODEで学ぶC言語のStep6です.Step5で一応終了しましたが、要望の多かったジョイントの使い方と制御を説明します。補講となります。 ジョイントは我々の周りでは、折畳み携帯のヒンジやドアの […]
物理エンジンODEで学ぶC言語 [STEP6:補講] ジョイントの生成と制御 (2016-7-13) - ODEで学ぶC言語のStep6です.Step5で一応終了しましたが、要望の多かったジョイントの使い方と制御を説明します。補講となります。 ジョイントは我々の周りでは、折畳み携帯のヒンジやドアの […] 物理エンジンODEで学ぶC言語 [STEP5:まとめ] (2016-7-13) - 今回でこの講座は終わりです。先週作り始めたブロック崩し風ゲームを完成させましょう。 この手のゲームで必要になることは、ボールがブロックの当たったときにブロックの消す処理です。このサンプルプログラムではブロックを3個用意し […]
物理エンジンODEで学ぶC言語 [STEP5:まとめ] (2016-7-13) - 今回でこの講座は終わりです。先週作り始めたブロック崩し風ゲームを完成させましょう。 この手のゲームで必要になることは、ボールがブロックの当たったときにブロックの消す処理です。このサンプルプログラムではブロックを3個用意し […]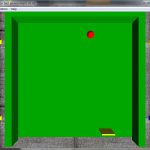 物理エンジンODEで学ぶC言語 [STEP4:構造体]力とトルクの与え方 (2016-6-21) - 物理エンジンで学ぶC言語のStep4です.今回は構造体と物体へ力やトルクを加える方法,さらにシミュレーションのリセット法などを学びます.構造体の概要については既にわかっているものとし,サンプルコードを示すことにより具体的 […] 物理エンジンODEで学ぶC言語 [STEP3:関数]動力学計算 (2016-6-15) - ODEで学ぶC言語のStep3です.今回は私がODEのAPIを元に作成した関数を使い,赤い球を落下させるプログラムを説明します. 今までのプログラムでは描画だけでしたが,今回からシミュレーションやゲームを作るために必要な […] 物理エンジンODEで学ぶC言語 [Step2:switch文]キーボード操作 (2016-6-7) - 今回は、switch文を使ったキー処理の方法を学びます.キーボード入力の処理にswitch文はうってつけです。 ゲームではキーボード入力によりレーザービームを発射したり,車を操縦しますね.switch文を使って,キーボー […]
物理エンジンODEで学ぶC言語 [STEP4:構造体]力とトルクの与え方 (2016-6-21) - 物理エンジンで学ぶC言語のStep4です.今回は構造体と物体へ力やトルクを加える方法,さらにシミュレーションのリセット法などを学びます.構造体の概要については既にわかっているものとし,サンプルコードを示すことにより具体的 […] 物理エンジンODEで学ぶC言語 [STEP3:関数]動力学計算 (2016-6-15) - ODEで学ぶC言語のStep3です.今回は私がODEのAPIを元に作成した関数を使い,赤い球を落下させるプログラムを説明します. 今までのプログラムでは描画だけでしたが,今回からシミュレーションやゲームを作るために必要な […] 物理エンジンODEで学ぶC言語 [Step2:switch文]キーボード操作 (2016-6-7) - 今回は、switch文を使ったキー処理の方法を学びます.キーボード入力の処理にswitch文はうってつけです。 ゲームではキーボード入力によりレーザービームを発射したり,車を操縦しますね.switch文を使って,キーボー […]Kaldiインストールメモ (2016-6-6) - 音声認識エンジンKaldi関連プログラムのインストールメモ 0.準備 $ sudo apt-get install build-essential gfortran libgfortran3 libblas-dev li […]
物理エンジンODEで学ぶC言語2016[Step1:物体の描画] (2016-5-25) - 物理エンジンODEを使い,ゲームを作りながらC言語をマスターすることを目指して連載します。ODEのバージョンは0.13に対応しています。なお、KITロボティクス学科の講義「コンピュータ工学Ⅰ」と連動しており […]Harkインストールメモ (2016-5-18) - これはHarkインストールのメモです。 環 境 Ubuntu14.04.4 (64bit) インストール http://www.hark.jp/wiki.cgi?page=HARK+Installation+Instru […]
 C/C++統合開発環境Code::Blocks16.01のインストール (Windows) (2016-4-7) - CodeBlocks(コードブロックス)というフリーでオープンソースなC/C++統合開発環境のインストール法を説明します.日本では,Codeblocksはあまり馴染みがないかもしれませんが,オープンソースであり、Wind […]
C/C++統合開発環境Code::Blocks16.01のインストール (Windows) (2016-4-7) - CodeBlocks(コードブロックス)というフリーでオープンソースなC/C++統合開発環境のインストール法を説明します.日本では,Codeblocksはあまり馴染みがないかもしれませんが,オープンソースであり、Wind […]RoboCup@Home: 音声認識&オーディオ検出テスト (2016-4-1) - ロボカップジャパンオープン2016の@Home Educationで実施された、音声認識&オーディオ検出テスト(Speech recognition & Audio detection)のルール概要を説明します。 […]
RoboCup@Home: ナビゲーションテスト (2016-3-30) - RoboCup@Homeのルール説明をします。@Homeは家庭での暮らしに役に立つロボットの研究開発を促進するためのプロジェクトで、その技術レベルを評価する競技会が開催されています。ジャパンオープン@Home Educ […]
 ロボカップジャパンオープン2016優勝! (2016-3-30) - 2016年3月25日から27日の間、愛知工業大学で開催されたロボカップジャパンオープン2016のRoboCup@Home Educationリーグで金沢工業大学夢考房RoboCup@HomeプロジェクトとDKTの合同チー […]
ロボカップジャパンオープン2016優勝! (2016-3-30) - 2016年3月25日から27日の間、愛知工業大学で開催されたロボカップジャパンオープン2016のRoboCup@Home Educationリーグで金沢工業大学夢考房RoboCup@HomeプロジェクトとDKTの合同チー […]Mecab (形態素解析エンジン)のインストールメモ (2016-3-22) - @Homeのタスクで形態素解析する必要がでてきたので、MECABをUbunt14.04にパッケージでインストールしたときのメモ。ユーザ辞書の作成で少しはまった。 以下のサイトを参照した。 https://gist.git […]
ROS-Gazeboを使ったHappy Miniシミュレータリリース (2016-1-27) - ROSとGAZEBOを使ったHappy Miniのシミュレータを以下のGithubでリリースしました。遊んでください! GitHub - demulab/mini_sim: A Gazebo simulat […]
 ロボットプログラミングⅡ:第15週 ロボットアームと位置センサ (2016-1-22) - 今週は先週作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。 位置センサ用プラグインの追加 gazeboのロボットモデルに位置センサを取り付けるために、~/catkin_ […]
ロボットプログラミングⅡ:第15週 ロボットアームと位置センサ (2016-1-22) - 今週は先週作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。 位置センサ用プラグインの追加 gazeboのロボットモデルに位置センサを取り付けるために、~/catkin_ […] ロボットプログラミングⅡ:第13週 ロボットアーム (2016-1-8) - 今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照してください。このサンプルでは参考リンクのrrbot.xacroをベースに作っています。 ソース […]
ロボットプログラミングⅡ:第13週 ロボットアーム (2016-1-8) - 今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照してください。このサンプルでは参考リンクのrrbot.xacroをベースに作っています。 ソース […]Juliusディクテーション実行キットのインストール (2015-12-25) - Juliusディクテーション実行キットのインストールメモ このページの説明を読んでUbuntu14.04にインスト−ルした。以下、手順をまとめる。なお、ディクテーションキットの出力はEUC-JPなので、Ubuntuのgn […]
ROSのOpenCVではまる (2015-12-5) - ROS Indigoでcatkin_makeしたときに以下のエラーではまったのでメモ CMake Error at /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmak […]
ロボットプログラミングⅡ:第8週 GAZEBOで画像処理(cv_bridge) (2015-12-4) - この記事は私が担当している講義ロボットプログラミングⅡ用です。今回はcv_bridgeを使います。ROSでOpenCVを使いgazeboシミュレータのRGB-Dセンサから取得した画像を処理します。赤色の抽出とエッジ抽出を […]
 ROS×Python勉強会: cv_bridge (2015-12-3) - この記事はROS×Python勉強会用です。今回はcv_bridgeを使い、ROSでOpenCVを使いxtionのカメラから取得した画像を処理します。 この記事は、以下のROSチュートリアルと「ROSで始めるロボットプロ […]
ROS×Python勉強会: cv_bridge (2015-12-3) - この記事はROS×Python勉強会用です。今回はcv_bridgeを使い、ROSでOpenCVを使いxtionのカメラから取得した画像を処理します。 この記事は、以下のROSチュートリアルと「ROSで始めるロボットプロ […]Xtion Pro LiveをUSB3.0とROS Indigoで使うメモ (2015-12-2) - Xtion Pro LiveをUSB3.0しかないパソコンで、Ubuntu 14.04 + ROS Indigo環境で使用するためのメモ。 Xtion Pro Liveのファームウェアをアップグレードする。 […]
ROS IndigoでRealSense R200 (2015-12-1) - ROS Indigo (Ubuntu14.04)でIntel RealSense R200を動かしたときの簡単なメモ。バイナリがないのでソースからインストール。院生に教えてもらったが少しはまる。RealSense R20 […]