Xtion Pro LiveをUSB3.0しかないパソコンで、Ubuntu 14.04 + ROS Indigo環境で使用するためのメモ。
- Xtion Pro Liveのファームウェアをアップグレードする。詳しい方法は以下のウェブサイトを参照。なお、ファームウェアのアップグレードはWindowsを使いUSB2.0のポートを使う。Windows用のドライバはXtion Pro Live付属のCD-ROMを使用した。
- Ubuntu14.04を立ち上げ、XtionをUSB3.0のポートに接続する。
- ROS IndigoのOpenNI2を使用する。以下のコマンドで必要なパッケージをインストールする。
- $ sudo apt-get install ros-indigo-rgbd-launch ros-indigo-openni2-camera ros-indigo-openni2-launch
- Viewer関連のパッケージをインストールする。
- $ sudo apt-get install ros-indigo-rqt ros-indigo-rqt-common-plugins ros-indigo-rqt-robot-plugins
- ROSの必要なラウンチファイルを起動する。
- $ roslaunch openni2_launch openni2.launch
- rqtを起動する。rqtはGUI開発のフレームワーク。詳細はここを参照。
- $ rqt
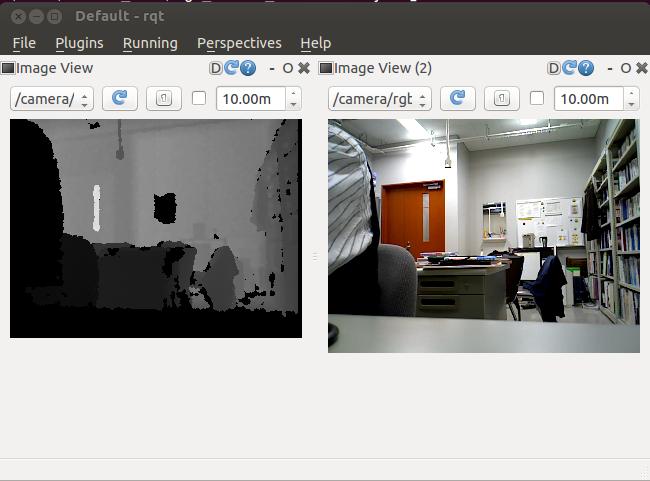
- rqtでImage Viewを表示する方法。rqtのメニューバーで次のように指定する。
- Plugins -> Visualization -> Image View
- depthセンサの表示 /camera/depth/image
- irセンサの表示 /camera/ir/image
- rgbセンサの表示 /camera/rgb/image_raw
- $ rqt
なお、OpenNI2に関する記述は以下のサイトを参考にした。


コメント