ROS Indigo (Ubuntu14.04)でIntel RealSense R200を動かしたときの簡単なメモ。バイナリがないのでソースからインストール。院生に教えてもらったが少しはまる。RealSense R200はxtionと比較してもとても小さく、軽量、安価。
- RealSense – ROS Wikiがソース。少々わかりづらい。RealSenseドライバをインストールするときは、Ubntu14.04の場合patchをあてるスクリプトpatch_ubuntu_uvc.shを行ってからインストールのスクリプト~/src/RealSense_ROS/r200_install/install.shを実行。
- RealSenseドライバのインストール
- sudo apt-get update
- cd
- mkdir src
- cd src
- git clone https://github.com/PercATI/RealSense_ROS.git
- cd ~/src/RealSense_ROS/r200_install/ds_uvcdriver/scripts
- chmod u+x patch_ubuntu_uvc.sh
- sudo ./patch_ubuntu_uvc.sh
- cd ~/src/RealSense_ROS/r200_install
- sudo ./install.sh
- cd ~/src/RealSense_ROS/r200_install/ds_connectivity_workaround
- chmod u+x install_rules.sh
- sudo ./install_rules.sh
- R200ノードレットのインストール
- cd ~/src/RealSense_ROS/realsense_dist/2.3
- sudo ./install_realsense_ros.sh
エラーが出る場合は以下を実行して下の図のようrに$ROS_DISTROをindigoに変更してやり直す。
$ gedit install_realsense_ros.sh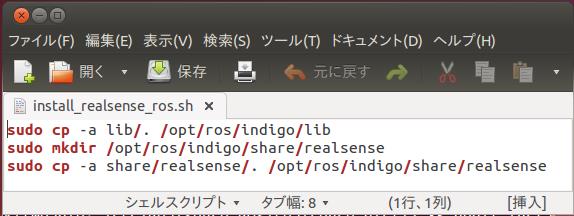
- R200ノードレットの実行
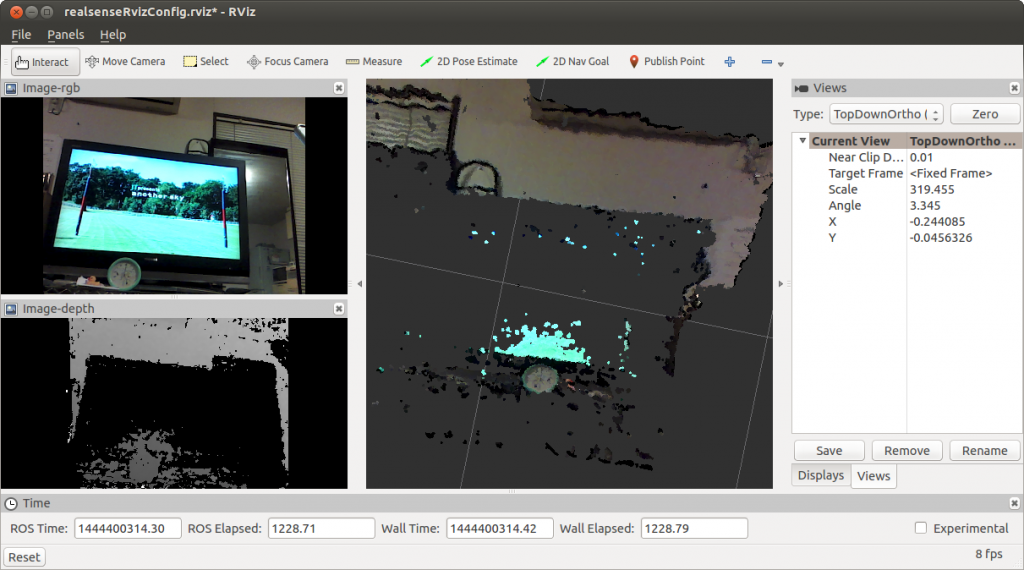
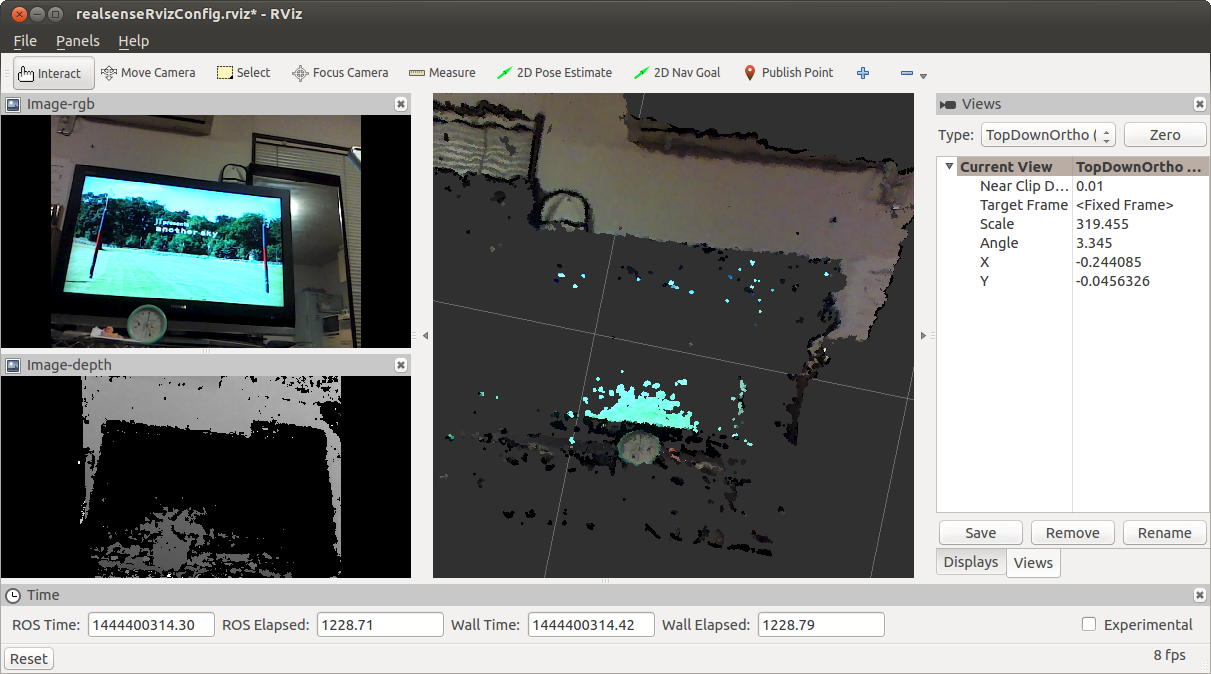
- roslaunch realsense realsense_r200_launch.launch
- rosrun rviz rviz
- file->open configで以下のファイルを開くと上の画像open~/src/RealSense_ROS/realsense_dist/2.3/realsenseRvizConfig.rviz
終わり

コメント