
6月28日から7月4日までドイツのライプチヒ市で開催されたRoboCup2016世界大会に出場した金沢工業大学demura.netチームが@Homeリーグで23チーム中8位の成績を収めました。
RoboCup世界大会は人工知能を搭載した自律ロボットによる競技会で、今年の大会には世界45ヶ国から3500名の参加者、1200台のロボットが参加した世界最大のロボット競技会の一つで、年々規模が大きくなりオリンピックの様相を呈してきました。その中で@Homeリーグは人間の生活を支援するロボットの研究開発促進のために設立されたリーグで、家庭を模した会場で顔認識、物体認識、音声認識、ナビゲーションなどの一連の技術を競います。
今回参加したdemura.netチームは金沢工業大学夢考房RoboCup@Homeプロジェクト、夢考房Junior、ロボティクス学科出村研究室の合同チームで、メンバーは次のとおりです。
メンバー
- ロボティクス学科 教授 出村公成:指導責任者
- ロボティクス学科4年 永島一輝:音声認識担当
- ロボティクス学科3年 榎本光洋:チームリーダー、ナビゲーション担当
- ロボティクス学科2年 山川武聖:ハードウェア担当
- 明聖高校3年 出村賢聖:顔認識・物体認識・プレゼン担当
競技は、Stage1、Stage2、Finalと進み、Stage1に出場した23チームから上位12チームがStage2に進出し、Stage2の上位5チームがFinalへ進出できます。今回、demura.netチームはFinalへの進出を目標としていました。
Stage 1
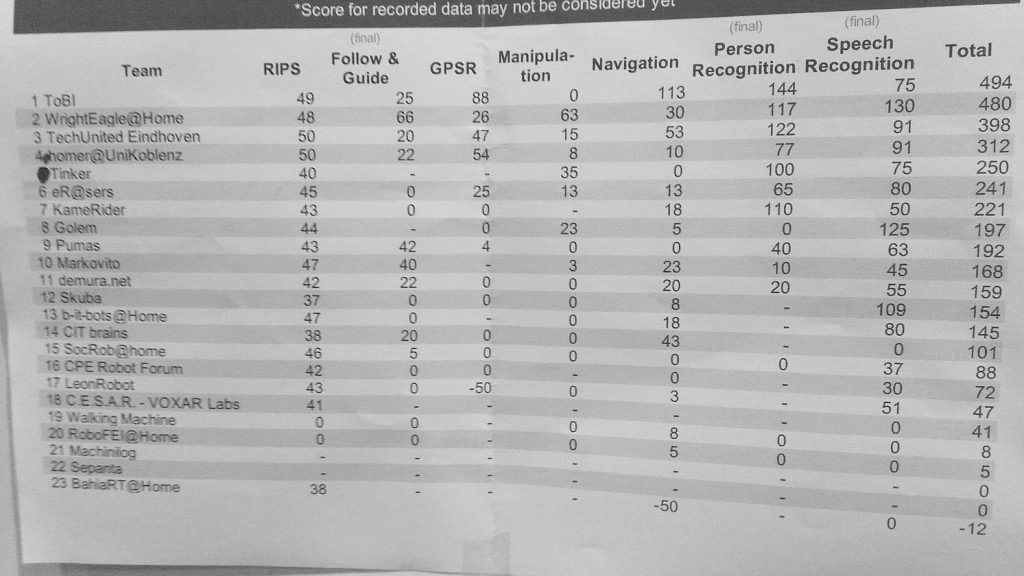
Stage1はRIPS(Robot Inspections)、Follow&Guide、GPSR (General Purpose Service Robot)、Manipulation、Person Recognition、Speech Recognitionの6種目の競技合計点を競います。
demura.netチームは日本大会ではSpeech Recognitionテストで満点を取得しました。この競技は会会場で与えられた50問の質問のうちランダムで10問選び、人がロボットに質問し、ロボットが解答し、その正解数を競います。10問のうち5問はロボットの正面から、残りの5問は正面以外の5方向からロボットに質問し、ロボットはその音源を定位しなければなりません。そのため、システムインフロンティア製の8chマイクロフォンアレーTAMAGOを装備して、HarkとKaldiを使いソフトウェアを開発しました。研究室内の練習では150点満点中コンスタントに130点を取得しており、かなり自信を持って臨みました。本番では、周りの環境音と比較して話者の声が小さく55点と振る舞わず、思うように得点できませんでした。結果が出るまで気が気でありませんでしたが、何とか11位でStage2に進むことができました。


Stage2
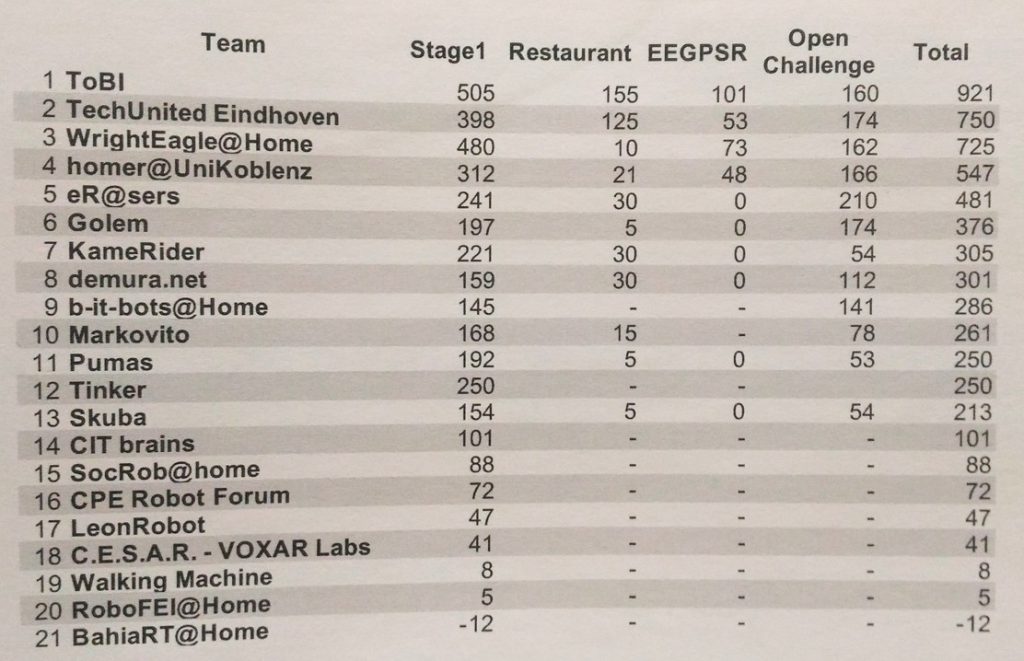
Stage2はRestaurant、EEGPSR(Enhanced Endurance General Purpose Service Robot)、Open Challengeの3競技でStage1の合計点を合わせた上位5チームがFinalへ進出します。Restaurantは会場の実際のレストランを使い、ロボットウェートレスとしての機能を競います。この競技はぶっけ本番です。場所も本番の直前に教えられるので全く未知の環境で競技を行わなければならない非常に難易度の高い競技です。demura.netチームはテーブルの場所を覚えるところまででき、3番目得点を獲得できました。
EEGPSRはStage1のGPSR(General Purpose Service Robot: 汎用目的サービスロボット)をさらに難しくしたもので、難易度によって6つのカテゴリに分かれています。例えば、「キッチンへ行き、テーブルの上のコーラを取って、リビングルームにいるトムに渡しなさい。」、あるいは、命令が矛盾してタスクを遂行できないといった問題もあります。その場合は、何が矛盾しているかロボットが音声で伝える必要があります。demura.netチームはミスもあり、得点できませんでした。
最後の、Open Challengeは各チームの日頃の研究を発表する自由デモンストレーションです。持ち時間は10分で、説明3分以内、残りはロボットのデモとなります。demura.netチームは紙の絵本を読むデモンストレーションを行いました。絵本は文字が背景画像の中に描かれているので文字認識がとても難しいもので、スクリーンに映像が映らないというミスはあったものの112点と比較的高得点を取得できました。

結局、合計301点となり、全体では8位となりFinal進出を逃しました。7位の東大・中国南開大学・シンガポール工科大学・芝浦工大連合チームとの得点差はわずが4点でした。昨年はRoboCup世界大会初出場で9位、得点167点でした。今年は得点もほぼ倍増し、自分たちの足りない点もわかり、確かな手ごたえを掴みました。来年のRoboCup世界大会は名古屋で開催されます。日本開催の有利を活かして表彰台を狙います!

なお、今回、世界大会に参加できたのは、以下のスポンサー様の暖かいご支援によるものです。
- プラチナスポンサー:
株式会社 都筑製作所 - ゴールドスポンサー:
中村留精密工業株式会社
三光合成株式会社 - シルバースポンサー:
株式会社 システムインフロンティア
東京ドロウイング株式会社
マスプロ電工株式会社
アーテック株式会社 - ブロンズスポンサー:
株式会社 金沢エンジニアリングシステムズ
株式会社 第1システムエンジニアリング
株式会社 アイ・ティー・ケー
丸文通商株式会社
ありがとうございました。

コメント