 robocup@home
robocup@home Description of the approaches and information on scientific achievements
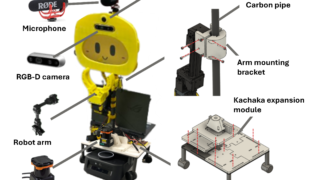
The Happy Robot team develops an open-hardware platform Happy Edu to lower entry barriers for RoboCu...
 robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup
robocup  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  deeplearning
deeplearning  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home