
 HARD2021:ワークショップに必要な知識とスキルの勉強法 (2021-3-5) - HARD2021ワークショップに必要な知識とスキルの勉強法を紹介します。ROSのお勉強だけは必須です。後は、必要に応じて取り組んでください。 ROSのお勉強 習得に要する期間:1週〜2週間 ROS Tutorial (日 […]
HARD2021:ワークショップに必要な知識とスキルの勉強法 (2021-3-5) - HARD2021ワークショップに必要な知識とスキルの勉強法を紹介します。ROSのお勉強だけは必須です。後は、必要に応じて取り組んでください。 ROSのお勉強 習得に要する期間:1週〜2週間 ROS Tutorial (日 […] HARD2021参加申込始まる! (2021-2-26) - HARD2021(Home AI Robot Development)スプリングワークショップの参加申込が始まりました! 日本ロボット学会インテリジェントホームロボティクス研究専門委員会主催の「知能ホームロボティクス入門 […]
HARD2021参加申込始まる! (2021-2-26) - HARD2021(Home AI Robot Development)スプリングワークショップの参加申込が始まりました! 日本ロボット学会インテリジェントホームロボティクス研究専門委員会主催の「知能ホームロボティクス入門 […]Ubuntu18.04: Dockerのインストール (2021-2-25) - DockerをUbuntu18.04にインストールしたときのメモ。Dockerの公式サイトdocs.docker.comに従っている。 参考サイト Install Docker Engine on Ubuntu 古いバー […]
 Ubuntu18.04: Jupyter Labのインストール (2021-2-25) - Ubuntu18.04にJupyter Labをインストールしたときのメモ。 インストール とっても簡単! $ pip3 install jupyterlab 設 定 インストール先のパスが設定されていないので.bash […]
Ubuntu18.04: Jupyter Labのインストール (2021-2-25) - Ubuntu18.04にJupyter Labをインストールしたときのメモ。 インストール とっても簡単! $ pip3 install jupyterlab 設 定 インストール先のパスが設定されていないので.bash […] Sawyer:サンプルプログラム (2021-2-18) - MoveIt!を使ったロボットアームを制御するサンプルプログラムです。 #!/usr/bin/env python # -*- coding: utf-8 -*- import sys import copy impor […]
Sawyer:サンプルプログラム (2021-2-18) - MoveIt!を使ったロボットアームを制御するサンプルプログラムです。 #!/usr/bin/env python # -*- coding: utf-8 -*- import sys import copy impor […] Sawyer:プログラムでロボットを動かす方法 (2021-2-18) - MoveIt!を使ったロボットアームを制御するサンプルプログラムです。 #!/usr/bin/env python # -*- coding: utf-8 -*- #日本語のコメントを入れるためのおまじない import […] Sawyer:リファレンスサイト (2021-2-16) - Sawyerを使う上で参考になるサイトを紹介します。 Setup Workstation Setup Networking Software Sawyer SDK Wiki Sawyer API References S […]
Sawyer:プログラムでロボットを動かす方法 (2021-2-18) - MoveIt!を使ったロボットアームを制御するサンプルプログラムです。 #!/usr/bin/env python # -*- coding: utf-8 -*- #日本語のコメントを入れるためのおまじない import […] Sawyer:リファレンスサイト (2021-2-16) - Sawyerを使う上で参考になるサイトを紹介します。 Setup Workstation Setup Networking Software Sawyer SDK Wiki Sawyer API References S […] Sawyer: GAZEBOチュートリアル (2021-2-16) - Gazeboシミュレータの実行方法 Ubuntu端末で以下のコマンドを実行する。 ディレクトリの移動 $ cd ~/ros_ws シミュレーション環境への移行 $ ./intera.sh sim シミュレータの起動 $ […]
Sawyer: GAZEBOチュートリアル (2021-2-16) - Gazeboシミュレータの実行方法 Ubuntu端末で以下のコマンドを実行する。 ディレクトリの移動 $ cd ~/ros_ws シミュレーション環境への移行 $ ./intera.sh sim シミュレータの起動 $ […] Sawyer: シミュレータのインストール (Ubuntu18.04) (2021-2-16) - Sawyerで推奨されているUbuntuのバージョンは16.04ですが、18.04でも動くのでその方法を紹介します。 インストール 端末を開き、以下のコマンドを実行してSawyerシミュレータをインストールする。手で打ち […]
Sawyer: シミュレータのインストール (Ubuntu18.04) (2021-2-16) - Sawyerで推奨されているUbuntuのバージョンは16.04ですが、18.04でも動くのでその方法を紹介します。 インストール 端末を開き、以下のコマンドを実行してSawyerシミュレータをインストールする。手で打ち […] Sawyer: シミュレータのインストール (Ubuntu16.04) (2021-2-15) - インストール Ubuntu端末を開き、以下のコマンドを実行してシミュレータをインストールする。手で打ち込まないでコピペしてください。 $ sudo apt-get install python-catkin-tools […]
Sawyer: シミュレータのインストール (Ubuntu16.04) (2021-2-15) - インストール Ubuntu端末を開き、以下のコマンドを実行してシミュレータをインストールする。手で打ち込まないでコピペしてください。 $ sudo apt-get install python-catkin-tools […] JETSON TX2:JetPack 4.5のインストール (2021-2-10) - 眠っているJetson TX2にFolding@homeをやらせようとJetPack4.5をインストールしたときのメモ。TX2のGPUに期待したがOpenCLに対応していないので、GPUでFoldingはできないようだ。 […]
JETSON TX2:JetPack 4.5のインストール (2021-2-10) - 眠っているJetson TX2にFolding@homeをやらせようとJetPack4.5をインストールしたときのメモ。TX2のGPUに期待したがOpenCLに対応していないので、GPUでFoldingはできないようだ。 […] VGG Image Annotator (VIA):お手軽アノテーションツール (2021-1-10) - インスタンスセグメンテーション用アノテーションツールとして使っているVGG Image Annotator (VIA)の使用法のメモ。VIAはウェブベースのツールでHTML、Javascript、CSS以外のライブラリを […]
VGG Image Annotator (VIA):お手軽アノテーションツール (2021-1-10) - インスタンスセグメンテーション用アノテーションツールとして使っているVGG Image Annotator (VIA)の使用法のメモ。VIAはウェブベースのツールでHTML、Javascript、CSS以外のライブラリを […] 深層学習オンラインハッカソン2021 (2021-1-9) - 専門ゼミ(プレゼミ)で実施する深層学習ハッカソンの実施要領。コロナ禍のためオンラインで実施する。 目 的 現実のテーマを深層学習を使って解決することにより、深層学習の使い方を体験し理解を深める。 オンラインでの共同開発を […]
深層学習オンラインハッカソン2021 (2021-1-9) - 専門ゼミ(プレゼミ)で実施する深層学習ハッカソンの実施要領。コロナ禍のためオンラインで実施する。 目 的 現実のテーマを深層学習を使って解決することにより、深層学習の使い方を体験し理解を深める。 オンラインでの共同開発を […] Docker Desktop for Windowsのインストール (2021-1-2) - Docker Desktop for Windowsのインストールメモ 環境 エディション:Windows 10 Education バージョン:2004 OSビルド:19041.685 準備 WSL2の有効化 ここでは […]
Docker Desktop for Windowsのインストール (2021-1-2) - Docker Desktop for Windowsのインストールメモ 環境 エディション:Windows 10 Education バージョン:2004 OSビルド:19041.685 準備 WSL2の有効化 ここでは […] HARD2020:Gazeboで保存したワールドの再利用法 (2020-12-18) - 本記事では、カナダのSimon Fraser University, Autonomy Lab.のJacob PerronさんのフォークしたiRobot社のRoomba, Create2用のROSドライバーパッケージcr […]
HARD2020:Gazeboで保存したワールドの再利用法 (2020-12-18) - 本記事では、カナダのSimon Fraser University, Autonomy Lab.のJacob PerronさんのフォークしたiRobot社のRoomba, Create2用のROSドライバーパッケージcr […]emacsの設定 (2020-12-18) - emacs設定ファイル(~/.emacs) ;(set-face-background 'default "#dddddd") (load-theme 'manoj-dark t) (global-set-key "\C […]
 ROS演習12-2020:ロボットアーム2 (2020-12-16) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。&n […]
ROS演習12-2020:ロボットアーム2 (2020-12-16) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。&n […] ROS演習11-2020:ロボットアーム (2020-12-16) - 本記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照してく […]
ROS演習11-2020:ロボットアーム (2020-12-16) - 本記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照してく […] ROS演習10-2020: ロボットビジョン (OpenCVとの連携) (2020-12-10) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期講義ロボットプログラミングⅡ用です。今回はcv_bridgeを使います。ROSでOpenCVを使いgazeboシミュレータのRGB- […]
ROS演習10-2020: ロボットビジョン (OpenCVとの連携) (2020-12-10) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期講義ロボットプログラミングⅡ用です。今回はcv_bridgeを使います。ROSでOpenCVを使いgazeboシミュレータのRGB- […] ROS演習9-2020:ナビゲーションとアクションプログラム (2020-12-5) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年後学期開講の講義ロボットプログラミングⅡ用です。ROS演習8ではrvizを使いGUIでロボットを動かしましたが、今回はROSのActionLibを使ったア […]
ROS演習9-2020:ナビゲーションとアクションプログラム (2020-12-5) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年後学期開講の講義ロボットプログラミングⅡ用です。ROS演習8ではrvizを使いGUIでロボットを動かしましたが、今回はROSのActionLibを使ったア […] ROS演習8-2020:地図作成・自己位置推定 (gmapping, amcl) (2020-12-3) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期開講の講義ロボットプログラミングⅡ用です。今回は地図作成にgmappingパッケージと自己位置推定にamclパッケージを使いロボット […]
ROS演習8-2020:地図作成・自己位置推定 (gmapping, amcl) (2020-12-3) - この記事は私が金沢工業大学ロボティクス学科で担当している2020年度後学期開講の講義ロボットプログラミングⅡ用です。今回は地図作成にgmappingパッケージと自己位置推定にamclパッケージを使いロボット […]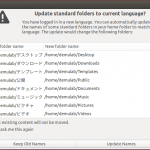 ROS演習7-2020:デッドレコニングを実装しよう! (2020-11-26) - デッドレコニングをRoombaに実装しましょう。 ROSの座標系 ROSではロボットの進行方向がx軸、左方向がy軸、上方向がz軸の正方向です。回転方向は反時計周りが正(0~π[rad])、時計回りが負(0~-π[rad] […]
ROS演習7-2020:デッドレコニングを実装しよう! (2020-11-26) - デッドレコニングをRoombaに実装しましょう。 ROSの座標系 ROSではロボットの進行方向がx軸、左方向がy軸、上方向がz軸の正方向です。回転方向は反時計周りが正(0~π[rad])、時計回りが負(0~-π[rad] […]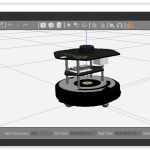 ROS演習6-2020:Roombaをプログラムで動かそう (2020-11-18) - ROS演習4の知識を使いRoombaをプログラムで動かします。この演習6は演習7を問題を解くためのヒントとなっています。 まず、Robotクラスを作成し、次のメンバ関数を作成します。 指定速度[m/s]で指定時間[s]だ […]
ROS演習6-2020:Roombaをプログラムで動かそう (2020-11-18) - ROS演習4の知識を使いRoombaをプログラムで動かします。この演習6は演習7を問題を解くためのヒントとなっています。 まず、Robotクラスを作成し、次のメンバ関数を作成します。 指定速度[m/s]で指定時間[s]だ […] ROS演習5-2020:サービス通信しよう! (2020-10-28) - 今回はROSの通信のもう一つの通信方式であるサービスを理解しましょう。次のROS Wikiを参考にしています。 C++でシンプルなサービスとクライアントを書く シンプルなサービスとクライアントを実行してみる サービスはR […]
ROS演習5-2020:サービス通信しよう! (2020-10-28) - 今回はROSの通信のもう一つの通信方式であるサービスを理解しましょう。次のROS Wikiを参考にしています。 C++でシンプルなサービスとクライアントを書く シンプルなサービスとクライアントを実行してみる サービスはR […]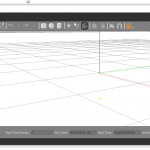 ROS演習4-2020:トピック通信しよう! (2020-10-28) - 今回はROSの通信方式であるトピックを学びます。 1. Publisher キーボードからロボットを操縦するmy_teleopパッケージを作ろう! ROS演習2と同じ要領でmy_teleopパッケージを作ります。忘れた人 […]
ROS演習4-2020:トピック通信しよう! (2020-10-28) - 今回はROSの通信方式であるトピックを学びます。 1. Publisher キーボードからロボットを操縦するmy_teleopパッケージを作ろう! ROS演習2と同じ要領でmy_teleopパッケージを作ります。忘れた人 […] プログラミング言語:第1週授業まとめ (2020-9-29) - 金沢工業大学ロボティクス学科プログラミング言語の授業用ページです。 Moodleは10/1以降でないと利用できないので、必要な情報をここにまとめました。来週までに終えてください。 講義パワーポイント プログラミング言語: […]
プログラミング言語:第1週授業まとめ (2020-9-29) - 金沢工業大学ロボティクス学科プログラミング言語の授業用ページです。 Moodleは10/1以降でないと利用できないので、必要な情報をここにまとめました。来週までに終えてください。 講義パワーポイント プログラミング言語: […] プログラミング言語:VS Code (VSCodium)のインストール (2020-9-29) - この記事はKITロボティクス学科プログラミング言語の授業用です。 ロボティクス学科対象のプログラミング言語(出村担当)ではC言語のエディタとして今年度からVSCodiumを使います。VS CodiumはマイクロソフトのV […]
プログラミング言語:VS Code (VSCodium)のインストール (2020-9-29) - この記事はKITロボティクス学科プログラミング言語の授業用です。 ロボティクス学科対象のプログラミング言語(出村担当)ではC言語のエディタとして今年度からVSCodiumを使います。VS CodiumはマイクロソフトのV […] プログラミング言語:VS Code (VSCodium) の使い方 (2020-9-29) - この記事はKITロボティクス学科プログラミング言語用で、授業で配布したVSCodiumのポータブル環境用です。 では、さっそくVSCodiumを使ってみましょう。 起 動 デスクトップに作ったVSCodiumのショートカ […]
プログラミング言語:VS Code (VSCodium) の使い方 (2020-9-29) - この記事はKITロボティクス学科プログラミング言語用で、授業で配布したVSCodiumのポータブル環境用です。 では、さっそくVSCodiumを使ってみましょう。 起 動 デスクトップに作ったVSCodiumのショートカ […] プログラミング言語:gtypistのインストールと使い方 (2020-9-29) - プログラミング言語はタッチタイプのトレーニングにgtypistをロボティクス学科教員がカスタイズしたものを使います。タッチタイプはキーボードを見ないでキーを打つことです。欧米諸国では小学校でタッチタイプを学んでいて、日本 […]
プログラミング言語:gtypistのインストールと使い方 (2020-9-29) - プログラミング言語はタッチタイプのトレーニングにgtypistをロボティクス学科教員がカスタイズしたものを使います。タッチタイプはキーボードを見ないでキーを打つことです。欧米諸国では小学校でタッチタイプを学んでいて、日本 […] WRS2020 未来のコンビニチャレンジ参加者募集! (2020-9-28) - 東京オリンピックと同じ年に計画された、日本政府主催の国際ロボット競技会World Robot Summit2020が来年に延期されました。それに伴い、金沢工業大学ロボティクス学科出村研究室Happy RobotチームはW […]
WRS2020 未来のコンビニチャレンジ参加者募集! (2020-9-28) - 東京オリンピックと同じ年に計画された、日本政府主催の国際ロボット競技会World Robot Summit2020が来年に延期されました。それに伴い、金沢工業大学ロボティクス学科出村研究室Happy RobotチームはW […] ロボットプログラミングⅡ-2020:第1週オリエンテーション (2020-9-24) - 私が担当している2020年度後学期開講の講義ロボットプログラミングⅡ用のページです.専門実験ロボット制御Ⅰでもこの環境を使用します。 第2週までのホームワーク 以下のリンクに従って、WSL2とROS Melodicのイン […]
ロボットプログラミングⅡ-2020:第1週オリエンテーション (2020-9-24) - 私が担当している2020年度後学期開講の講義ロボットプログラミングⅡ用のページです.専門実験ロボット制御Ⅰでもこの環境を使用します。 第2週までのホームワーク 以下のリンクに従って、WSL2とROS Melodicのイン […] FutureKreate Eduの要望アンケート (2020-9-23) - FutureKreateはゲーム感覚で使用できる新しいロボットシミュレータです。今回はPD実践の授業用にレゴマインドストームのエミュレータ/シミュレータである箱庭(athrill)と連携させました。 開発中なのでいろいろ […]
FutureKreate Eduの要望アンケート (2020-9-23) - FutureKreateはゲーム感覚で使用できる新しいロボットシミュレータです。今回はPD実践の授業用にレゴマインドストームのエミュレータ/シミュレータである箱庭(athrill)と連携させました。 開発中なのでいろいろ […] WSL: Windows for Subsystem for Linux (Ubuntu20.04)のインストールと設定 (2020-9-15) - Windows for Subsystem for Linux (以下、WSLと表記)のインストールとメモ。PD実践のシミュレータはWSL2では動かないので必ずWSLをインストールすること。 バージョンの確認 「スター […]
WSL: Windows for Subsystem for Linux (Ubuntu20.04)のインストールと設定 (2020-9-15) - Windows for Subsystem for Linux (以下、WSLと表記)のインストールとメモ。PD実践のシミュレータはWSL2では動かないので必ずWSLをインストールすること。 バージョンの確認 「スター […]「FutureKreate×箱庭」用EV3RT開発環境のインストール (2020-9-14) - PD実践で使用するFutureKreateが箱庭用EV3RT開発環境にLCDとサウンドAPIのシミュレーション機能を追加した開発環境をインストールする。 ダウンロード 以下のリンクをc:\eduフォルダーにダウンロード […]
 HARD2020:シミュレータでマイロボットのつくり方(補講) (2020-9-12) - HARDサマーワークショップに関するページです。ワークショップは全4回ですが、補講としてシミュレータでのロボットのつくり方は紹介します。これができると、自分達が開発したロボットをシミュレータで動作検証できます。 本記事で […]
HARD2020:シミュレータでマイロボットのつくり方(補講) (2020-9-12) - HARDサマーワークショップに関するページです。ワークショップは全4回ですが、補講としてシミュレータでのロボットのつくり方は紹介します。これができると、自分達が開発したロボットをシミュレータで動作検証できます。 本記事で […]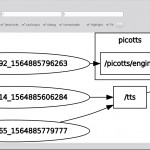 Raspberry Pi4:軽量ROSパッケージpicottsを使った音声合成 (2020-9-6) - オンライン、オフラインの色々な音声合成エンジンをサポートしているArnaud Rameyさんが開発したROSパッケージpicottsを紹介します。Raspberry Pi4 (RAM8GB)にUbuntu18.04をイン […]
Raspberry Pi4:軽量ROSパッケージpicottsを使った音声合成 (2020-9-6) - オンライン、オフラインの色々な音声合成エンジンをサポートしているArnaud Rameyさんが開発したROSパッケージpicottsを紹介します。Raspberry Pi4 (RAM8GB)にUbuntu18.04をイン […]emacsの設定メモ (2020-9-6) - emacs設定ファイル~/.emacsの個人メモ。 (load-theme 'tango-dark t) (global-set-key "C-h" 'delete-backward-char) (global-set- […]
 HARD2020:質問応答システムのつくり方(WSL2) (2020-9-4) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。 本記事ではWSL2を使った簡単な質問応答システムを作ってみましょう。言語は英語だけです。日本語には対応していません。 […]
HARD2020:質問応答システムのつくり方(WSL2) (2020-9-4) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。 本記事ではWSL2を使った簡単な質問応答システムを作ってみましょう。言語は英語だけです。日本語には対応していません。 […] HARD2020:ロボット聴覚のつくり方(第4回最終) (2020-9-2) - HARDサマーワークショップ「ロボット聴覚のつくり方(最終回)」に関するページです。今まで3回実施してきました。4回目の最終回はロボットの聴覚の作り方です。音声認識と音声合成について学び体験します。音声認識と音声合成の手 […] HARD2020:軽量ROSパッケージpicottsを使った音声合成 (2020-9-2) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。オンライン、オフラインの色々な音声合成エンジンをサポートしているArnaud Rameyさんが開発したROSパッケージ […]
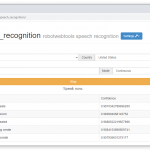
HARD2020:ロボット聴覚のつくり方(第4回最終) (2020-9-2) - HARDサマーワークショップ「ロボット聴覚のつくり方(最終回)」に関するページです。今まで3回実施してきました。4回目の最終回はロボットの聴覚の作り方です。音声認識と音声合成について学び体験します。音声認識と音声合成の手 […] HARD2020:軽量ROSパッケージpicottsを使った音声合成 (2020-9-2) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。オンライン、オフラインの色々な音声合成エンジンをサポートしているArnaud Rameyさんが開発したROSパッケージ […]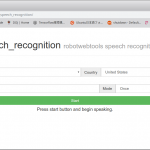 HARD2020:Web Speech APIを使った音声認識 (WSL2) (2020-9-2) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。 今回はSpeech APIを使ったROSの音声認識パッケージrwt_speech_recognitionをWSL2で […]
HARD2020:Web Speech APIを使った音声認識 (WSL2) (2020-9-2) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。 今回はSpeech APIを使ったROSの音声認識パッケージrwt_speech_recognitionをWSL2で […] WSL2:PCから音を出す方法 (2020-9-2) - この記事ではWSL2のUbunutuで音を出す方法を説明する。WSL2では現状、PCのサウンドデバイスを直接扱えない。/devにサウンドデバイスが認識されていない。そのためWSL2のUbuntuだけでは音を出すことはでき […]
WSL2:PCから音を出す方法 (2020-9-2) - この記事ではWSL2のUbunutuで音を出す方法を説明する。WSL2では現状、PCのサウンドデバイスを直接扱えない。/devにサウンドデバイスが認識されていない。そのためWSL2のUbuntuだけでは音を出すことはでき […]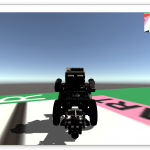 PD実践:LEGO EV3RTシミュレータ「FutureKreate×箱庭」の設定 (2020-9-1) - PD実践の授業で使うレゴEV3シミュレータ「FutureKreate×箱庭」の設定を説明する。箱庭とUnityを使う場合は参考サイトを参照されたい。 参考サイト TOPPERS/箱庭 単体ロボット向け 手 順 授業サンプ […]
PD実践:LEGO EV3RTシミュレータ「FutureKreate×箱庭」の設定 (2020-9-1) - PD実践の授業で使うレゴEV3シミュレータ「FutureKreate×箱庭」の設定を説明する。箱庭とUnityを使う場合は参考サイトを参照されたい。 参考サイト TOPPERS/箱庭 単体ロボット向け 手 順 授業サンプ […] PD実践:LEGO EV3RTシミュレータ「FutureKreate×箱庭」のインストール(作成中) (2020-9-1) - このページは作成中なので作業しないでください。 2020年度後学期KITロボティクス学科のPD実践用のページです。今年度は新型コロナの影響で今まで実施したようなLEGOマインドストームEV3実機を使った密なグループワーク […]
PD実践:LEGO EV3RTシミュレータ「FutureKreate×箱庭」のインストール(作成中) (2020-9-1) - このページは作成中なので作業しないでください。 2020年度後学期KITロボティクス学科のPD実践用のページです。今年度は新型コロナの影響で今まで実施したようなLEGOマインドストームEV3実機を使った密なグループワーク […] F@HチームKanazawaが4万ワークユニット達成! (2020-8-30) - Folding@homeチームKanazawaが4万ワークユニット、20億点を達成しました。順位も国内9位、世界299位にまでなりました。これも、メンバー皆様もおかげです。ありがとうございます。引き続き、新型コロナ問題が […]
F@HチームKanazawaが4万ワークユニット達成! (2020-8-30) - Folding@homeチームKanazawaが4万ワークユニット、20億点を達成しました。順位も国内9位、世界299位にまでなりました。これも、メンバー皆様もおかげです。ありがとうございます。引き続き、新型コロナ問題が […] HARD2020:ロボット視覚の作り方(Cameraと OpenCV) (2020-8-28) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。今回はcv_bridgeを使い、ROSでコンピュータビジョンライブラリOpenCVを使いカメラから取得した画像を処理し […]
HARD2020:ロボット視覚の作り方(Cameraと OpenCV) (2020-8-28) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。今回はcv_bridgeを使い、ROSでコンピュータビジョンライブラリOpenCVを使いカメラから取得した画像を処理し […] HARD2020:ロボット視覚の作り方(LIDAR) (2020-8-27) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。今回はLIDAR(Laser Imaging Detection and Ranging)の情報を取得するPython […] HARD2020:ロボット視覚のつくり方(第3回) (2020-8-24) - HARDサマーワークショップ「第3回ロボット視覚のつくり方」に関するページです。今回はロボットのLIDAR(レーザ式測域センサ)やカメラからのデータ取得方法とその処理について学び体験します。ハンズオンではシミュレータ上で […] HARD2020:プロジェクト1 (2020-8-22) - HARDサマーワークショップ第2回目で学んだことをベースにして次のプロジェクトを実施しよう。プロジェクトの達成に必要な知識はネットや書籍などで獲得してください。なお、ROSはいろいろなパッケージがありとても便利ですが、パ […]
HARD2020:ロボット視覚の作り方(LIDAR) (2020-8-27) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。今回はLIDAR(Laser Imaging Detection and Ranging)の情報を取得するPython […] HARD2020:ロボット視覚のつくり方(第3回) (2020-8-24) - HARDサマーワークショップ「第3回ロボット視覚のつくり方」に関するページです。今回はロボットのLIDAR(レーザ式測域センサ)やカメラからのデータ取得方法とその処理について学び体験します。ハンズオンではシミュレータ上で […] HARD2020:プロジェクト1 (2020-8-22) - HARDサマーワークショップ第2回目で学んだことをベースにして次のプロジェクトを実施しよう。プロジェクトの達成に必要な知識はネットや書籍などで獲得してください。なお、ROSはいろいろなパッケージがありとても便利ですが、パ […] HARD2020:ルンバをPythonでナビゲーションさせる (2020-8-22) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。今回はActionLibを使いナビゲーションのPythonプログラムを作りましょう。このナビゲーションはロボットが通過 […]
HARD2020:ルンバをPythonでナビゲーションさせる (2020-8-22) - この記事はHARD2020(Home AI Robot Development)ワークショップ用です。今回はActionLibを使いナビゲーションのPythonプログラムを作りましょう。このナビゲーションはロボットが通過 […]