この記事はHARD2020(Home AI Robot Development)ワークショップ用です。今回はcv_bridgeを使い、ROSでコンピュータビジョンライブラリOpenCVを使いカメラから取得した画像を処理します。この記事は、以下のROSチュートリアルと「ROSで始めるロボットプログラミング、小倉著」を参考にしています。
ソース
- ROSのチュートリアルと「ROSで始めるロボットプログラミング」を参考に改変しています。
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
import cv2
import numpy as np
from std_msgs.msg import String
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
class image_converter:
def __init__(self):
self.image_pub = rospy.Publisher("image_topic", Image, queue_size=1)
self.bridge = CvBridge()
self.image_sub = rospy.Subscriber("/create1/camera/image_raw",Image,self.callback)
def callback(self,data):
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
except CvBridgeError as e:
print(e)
# RGB表色系からHSV表色系に変換
hsv_image = cv2.cvtColor(cv_image, cv2.COLOR_BGR2HSV)
# しきい値の設定(ここでは赤を抽出)
color_min = np.array([150,100, 50])
color_max = np.array([180,255,255])
# マスク画像を生成
color_mask = cv2.inRange(hsv_image, color_min, color_max);
# 画像配列のビット毎の倫理積席。マスク画像だけが抽出される。
cv_image2 = cv2.bitwise_and(cv_image, cv_image, mask = color_mask)
# 重心を求める。moments関数を使うためグレースケール画像へ変換。
gray_image2 = cv2.cvtColor(cv_image2, cv2.COLOR_BGR2GRAY)
mu = cv2.moments(gray_image2, True)
x,y= int(mu["m10"]/mu["m00"]) , int(mu["m01"]/mu["m00"])
# 重心を中心として半径20ピックセルの円を描画
color = (0, 255, 0)
center = (x, y)
radius = 20
cv2.circle(cv_image2, center, radius, color)
# エッジを検出する。Canny関数を使うためRGBからグレースケールへ変換
gray_image = cv2.cvtColor(cv_image, cv2.COLOR_BGR2GRAY)
cv_image3 = cv2.Canny(gray_image, 15.0, 30.0);
# ウインドウのサイズを変更
cv_half_image = cv2.resize(cv_image, (0,0),fx=0.5, fy=0.5)
cv_half_image2 = cv2.resize(cv_image2, (0,0),fx=0.5,fy=0.5);
cv_half_image3 = cv2.resize(cv_image3, (0,0),fx=0.5,fy=0.5);
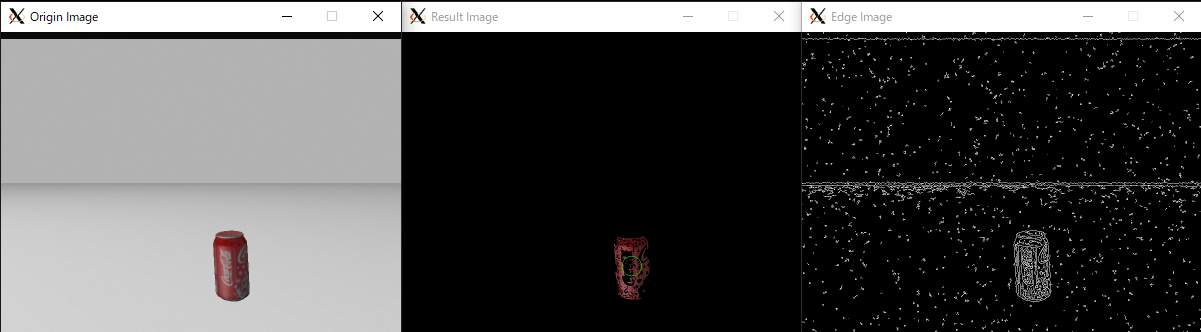
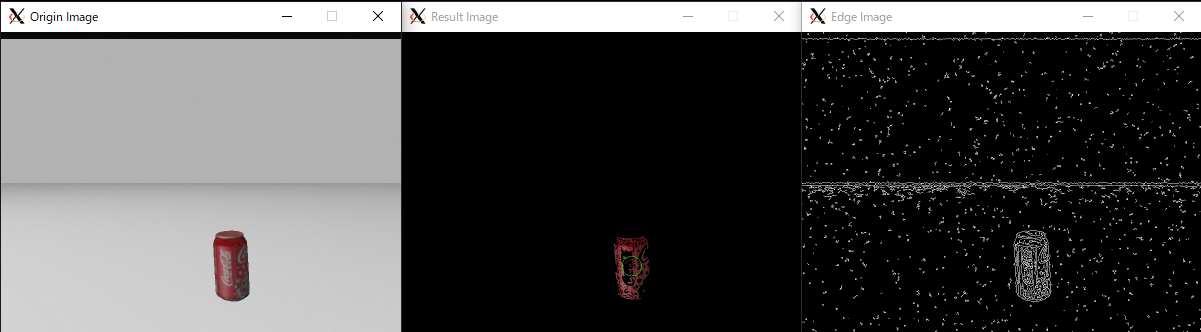
# ウインドウ表示
cv2.imshow("Origin Image", cv_half_image)
cv2.imshow("Result Image", cv_half_image2)
cv2.imshow("Edge Image", cv_half_image3)
cv2.waitKey(3)
try:
self.image_pub.publish(self.bridge.cv2_to_imgmsg(cv_image2, "bgr8"))
except CvBridgeError as e:
print(e)
def main():
ic = image_converter()
rospy.init_node('camera', anonymous=True)
try:
rospy.spin()
except KeyboardInterrupt:
print("Shutting down")
cv2.destroyAllWindows()
カメラの追加
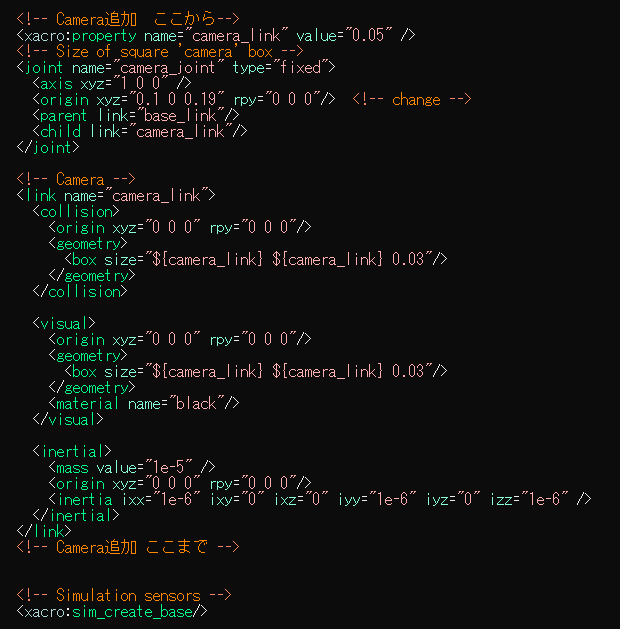
- 現在のロボットモデルにはカメラが搭載されいないので追加する。ロボットモデルについては~/catkin_ws/src/create_autonomy/ca_description/urdfの中でいろいろ記述されている。カメラを追加するために以下の2つのファイルに追記する。
- create_base.xacro:110行目 <!– Simulation sensors –>の上に以下を挿入する。
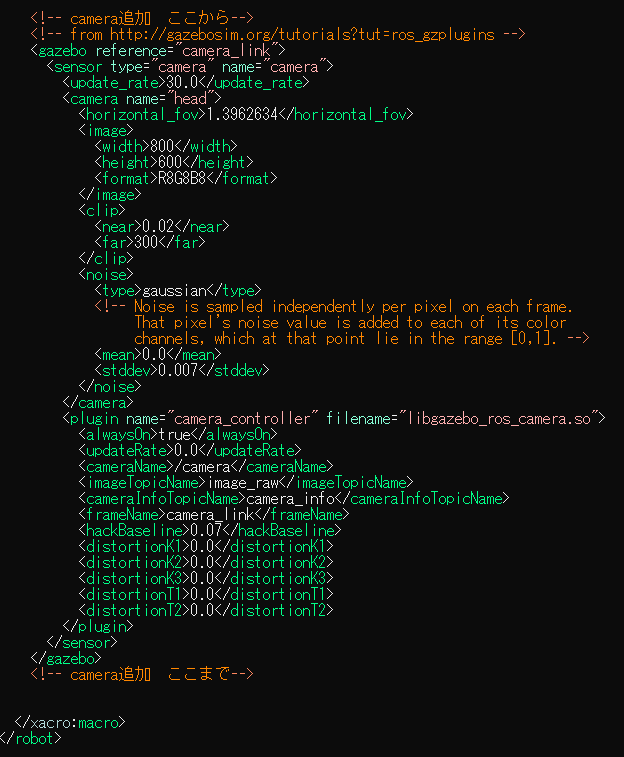
- create_base_gazebo.xacro:下から3行目に以下を挿入する。
- 追加済みファイルへの変更
- 以下のurdf_camera.tarファイルをクリックして、Cドライブ直下に保存する。~/catkin_ws/src/create_autonomy/ca_description/urdfの下にダウンロードする。
- Ubuntu端末を開いて、次のコマンドでurdf_camera.tarを~/catkin_ws/src/create_autonomy/ca_description/urdfの下にコピーする。UbuntuからWindowsのCドライブのパスは/mnt/cになる。
- cp /mnt/c/urdf_camera.tar ~/catkin_ws/src/create_autonomy/ca_description/urdf
- 端末で以下のコマンドを実行して追加済みファイルへ変更する。
$ roscd ca_description/urdf$ tar xvf urdf_camera.tar$ mv create_base.xacro create_base.xacro.org$ mv create_base_gazebo.xacro create_base_gazebo.xacro.org$ cp ./urdf_camera/create_base.xacro create_base.xacro$ cp ./urdf_camera/create_base_gazebo.xacro create_base_gazebo.xacro
準備
- $ cd ~/catkin_ws/src
- $ mkdir hard2020
$ cd ~/catkin_ws/src/hard2020$ catkin_create_pkg camera sensor_msgs opencv2 cv_bridge rospy std_msgs$ cd camera/src- エディタを使い上のプログラムをcamera.pyという名前をつけてsrc下に保存する。以下はgeditを使う場合。
$ gedit camera.py
- Pythonはビルドする必要はないが、ROSで使用する場合は必要になる場合があるので、以下のコマンドを実行する。
$ cd ~/catkin_ws$ catkin build camera
- コマンドで実行できるように実行権を与える。
$ chmod u+x camera.py
実行
- 端末を3つ開き、以下のコマンドを実行する。
- シミュレータの起動
$ roslaunch ca_gazebo create_empty_world.launch
- cameraノードの起動
$ rosrun camera camera.py
- 遠隔操作
$ roslaunch ca_tools keyboard_teleop.launch
ハンズオン
- サンプルプログラムの実行
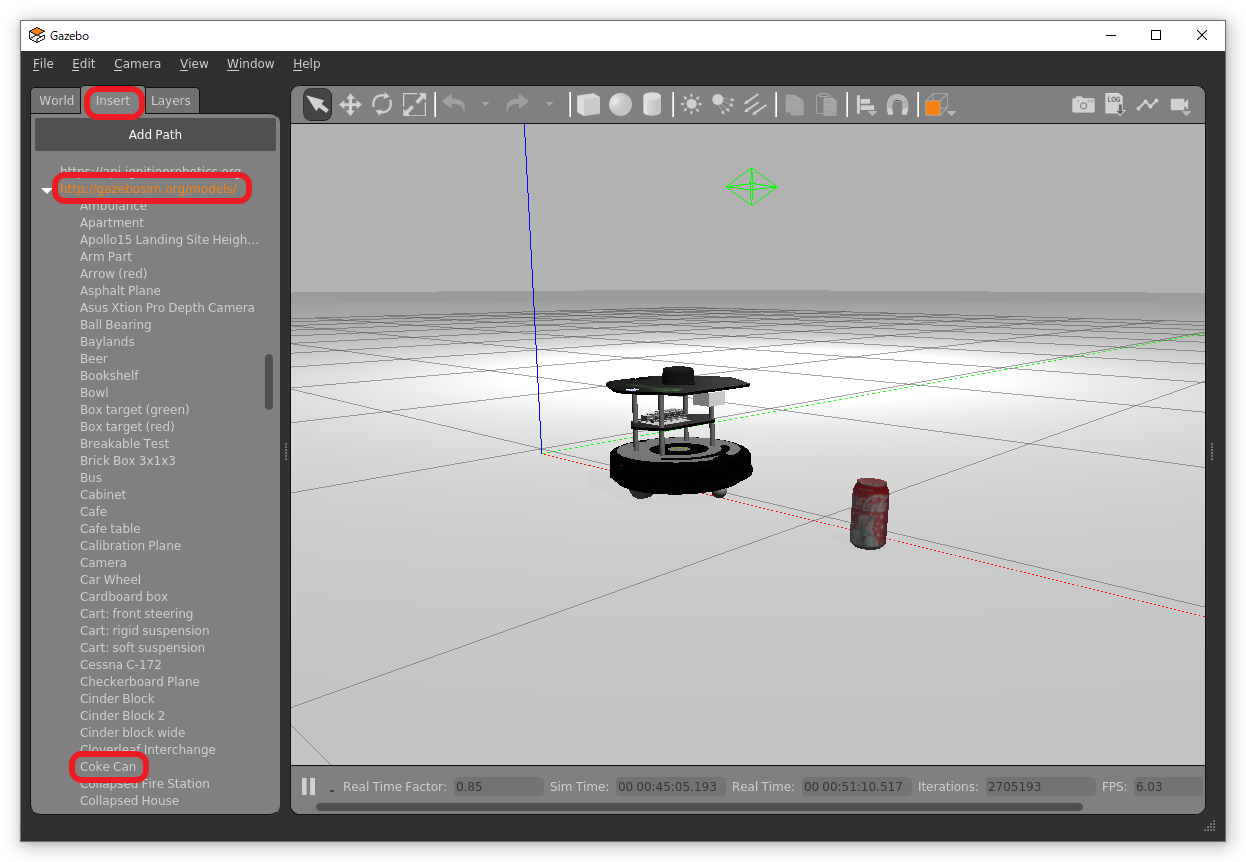
- シミュレータにコーラ缶(Coke Can)をロボットの前に挿入する。
- Insert タブ→http://gazbosim.org/models/→Coke Can
- ロボットをキーボードで操作してコーラ缶の方向に進んだり、その場回転して画像処理が行われていることを確認する。
- シミュレータにコーラ缶(Coke Can)をロボットの前に挿入する。
- OpenCV
- 勾配検出フィルタ
- サンプルプログラムではエッジ検出にcanny関数を使用した。その他にも勾配検出フィルタとして、Sobel関数、Laplacian関数などがある。参考リンクのOpenCV-Pythonチュートリアルで調べて、サンプルプログラムを改変して違いを見てみよう。
- 物体の輪郭抽出
- サンプルプログラムではコーラ缶の位置を推定するのに赤領域の重心を使った。より正確にするには物体の輪郭を検出するfindContours関数がある。参考リンクで調べて輪郭を使って物体の位置を推定してみよう。
- 勾配検出フィルタ
- 応用
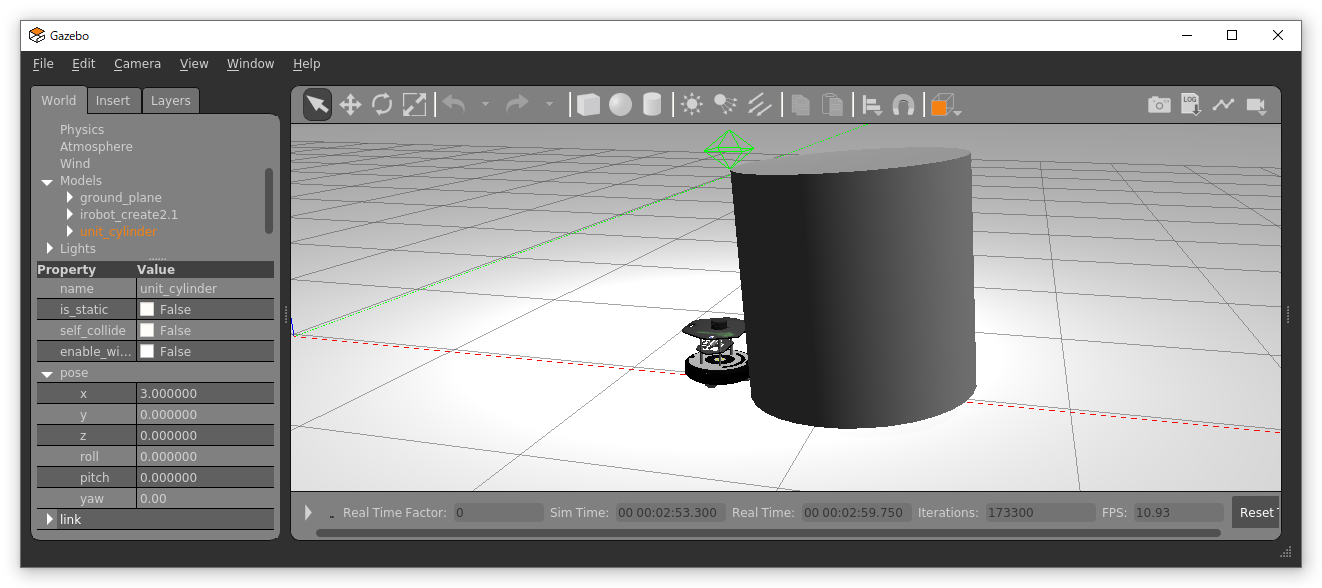
- コーラ缶の手前で停止するプログラムを作ろう。なお、カメラでは物体の距離が直接わからないので、コーラ缶の輪郭を検出し、その面積や外接矩形のサイズ[pixel]から推定する必要がある。コーラ缶のサイズはgazeboのGUIで簡単に調べることができる。
- コーラ缶を任意の位置において、それをロボットが探して近づき、手前で停止するプログラムを作ろう。なお、カメラの位置が比較的高いので近づいてコーラ缶を見失う場合には、urdfファイルを変更して高さを変えてもよい。
参考リンク
終わり
コメント