
 AIロボット入門2022:第1章 AIロボットをつくろう! (2022-9-18) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です.金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. […] AIロボット入門2022:第2.4節 はじめてのROS2 プログラミング (2022-9-17) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は, [第2章 はじめてのROS2] の2.4節はじめてのROS2プログラミングを説明します. &n […] AIロボット入門2022:2.4節 ROS2を動かしてみよう! (2022-9-17) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は, [第2章 はじめてのROS2] の2.1節から2.3節の説明並びにハンズオンを行います. &n […] ROS2とPythonで作って学ぶAIロボット入門の問い合わせ先 (2022-9-15) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の内容等についての問い合わせ先フォームができました.この本についての問い合わせは以下のリンクからお願いします. AIロボット入門本の問い合わせ先 なお, […] AIロボット入門2022:この本用Dockerイメージの使い方(Windows) (2022-9-14) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […] AIロボット入門2022:この本用Dockerイメージのダウンロードと使い方(Windows) (2022-9-13) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […] AIロボット入門2022:講義スケジュール (2022-9-13) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義スケジュールのたたき台.金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)で使用予定で […]
AIロボット入門2022:第1章 AIロボットをつくろう! (2022-9-18) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です.金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. […] AIロボット入門2022:第2.4節 はじめてのROS2 プログラミング (2022-9-17) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は, [第2章 はじめてのROS2] の2.4節はじめてのROS2プログラミングを説明します. &n […] AIロボット入門2022:2.4節 ROS2を動かしてみよう! (2022-9-17) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です. 今回は, [第2章 はじめてのROS2] の2.1節から2.3節の説明並びにハンズオンを行います. &n […] ROS2とPythonで作って学ぶAIロボット入門の問い合わせ先 (2022-9-15) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の内容等についての問い合わせ先フォームができました.この本についての問い合わせは以下のリンクからお願いします. AIロボット入門本の問い合わせ先 なお, […] AIロボット入門2022:この本用Dockerイメージの使い方(Windows) (2022-9-14) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […] AIロボット入門2022:この本用Dockerイメージのダウンロードと使い方(Windows) (2022-9-13) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)の講義資料です.金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)で使用予定です. なお,本講義では簡単のために […] AIロボット入門2022:講義スケジュール (2022-9-13) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義スケジュールのたたき台.金沢工業大学ロボティクス学科3年次2022年後学期開講のロボットプログラミングⅡ(2単位)で使用予定で […] KITトップページでAIロボット入門紹介される! (2022-9-12) - 共著の「ROS2とPythonで作って学ぶAIロボット入門」が金沢工業大学公式ウェブサイトのトップで紹介されました.下の写真は,東京大学・本郷書籍部に著者が集まって記念撮影したものです.なんと50冊も山積されて,色紙まで […] 拙著「ROS2とPythonで作って学ぶAIロボット入門」発売開始! (2022-8-31) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」が講談社から2022年8月30日に発刊になりました.Amazonでは9月1日に発売開始となります. この本は,初学者を対象にAIロボットに関する基礎理論とそのプロ […]
KITトップページでAIロボット入門紹介される! (2022-9-12) - 共著の「ROS2とPythonで作って学ぶAIロボット入門」が金沢工業大学公式ウェブサイトのトップで紹介されました.下の写真は,東京大学・本郷書籍部に著者が集まって記念撮影したものです.なんと50冊も山積されて,色紙まで […] 拙著「ROS2とPythonで作って学ぶAIロボット入門」発売開始! (2022-8-31) - 拙著「ROS2とPythonで作って学ぶAIロボット入門」が講談社から2022年8月30日に発刊になりました.Amazonでは9月1日に発売開始となります. この本は,初学者を対象にAIロボットに関する基礎理論とそのプロ […] Webots講座9-2022:PROTOファイル(アッカーマン・ビークル) (2022-7-11) - Webots講座2022の9回目です.今回で2022年度の講座はひとまず終了です.Webots講座4:自分の位置を知ろう(Python)でデッドレコニングを実装するハンズオンがありました.デッドレコニングを実装するには, […]
Webots講座9-2022:PROTOファイル(アッカーマン・ビークル) (2022-7-11) - Webots講座2022の9回目です.今回で2022年度の講座はひとまず終了です.Webots講座4:自分の位置を知ろう(Python)でデッドレコニングを実装するハンズオンがありました.デッドレコニングを実装するには, […] Webots講座8-2022:キーボード入力によるマニュアル操作(Python) (2022-7-11) - Webots講座の8回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はキーボードによるマニュアル操作を導入します.これでゲームのように車を操作できますね. レファレンス Keyboard (Cy […]
Webots講座8-2022:キーボード入力によるマニュアル操作(Python) (2022-7-11) - Webots講座の8回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はキーボードによるマニュアル操作を導入します.これでゲームのように車を操作できますね. レファレンス Keyboard (Cy […] Webots講座7-2022:LIDARの使い方と障害物回避 (Python) (2022-7-11) - Webots講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障害物回避を実現します […]
Webots講座7-2022:LIDARの使い方と障害物回避 (Python) (2022-7-11) - Webots講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障害物回避を実現します […] Webots講座6-2022:カメラの使い方と簡単な自動運転 (Python) (2022-7-11) - Webots講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサンプルプログラムを紹介 […] 拙著「ROS2とPythonで作って学ぶAIロボット入門」予約始まる! (2022-7-6) - 出村,萩原先生,升谷先生,タン博士との共著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)が2022年9月1日に発売予定で,Amazonで予約が始まりました.次のリンクから予約できます. ROS2とPyt […]
Webots講座6-2022:カメラの使い方と簡単な自動運転 (Python) (2022-7-11) - Webots講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサンプルプログラムを紹介 […] 拙著「ROS2とPythonで作って学ぶAIロボット入門」予約始まる! (2022-7-6) - 出村,萩原先生,升谷先生,タン博士との共著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)が2022年9月1日に発売予定で,Amazonで予約が始まりました.次のリンクから予約できます. ROS2とPyt […] Webots講座5-2022:スーパーバイザ・コントローラ (Python) (2022-7-4) - Webots講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパバイザ(Supervisor)コントローラがあります.スーパーバイザ […]
Webots講座5-2022:スーパーバイザ・コントローラ (Python) (2022-7-4) - Webots講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパバイザ(Supervisor)コントローラがあります.スーパーバイザ […] Webots講座4-2022:自分の位置を知ろう (Python) (2022-6-28) - Webots講座の4回目です.今回も前回に引き続き,Webotsの自動運転シミュレータを使います.BMW X5に搭載されているGPSを使い自分の位置(自己位置)を知る方法を学びます. レファレンス Webots for […]
Webots講座4-2022:自分の位置を知ろう (Python) (2022-6-28) - Webots講座の4回目です.今回も前回に引き続き,Webotsの自動運転シミュレータを使います.BMW X5に搭載されているGPSを使い自分の位置(自己位置)を知る方法を学びます. レファレンス Webots for […]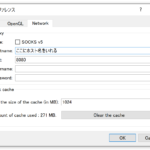 Webots:プロキシの設定 (2022-6-28) - 学内などのプロキシ環境下ではWebotsもプロキシ設定をする必要があります. メニューから[ツール]→[プリファレンス…]→[Network]タブを選択して,以下の項目を入力したら[OK]をクリックする. H […]
Webots:プロキシの設定 (2022-6-28) - 学内などのプロキシ環境下ではWebotsもプロキシ設定をする必要があります. メニューから[ツール]→[プリファレンス…]→[Network]タブを選択して,以下の項目を入力したら[OK]をクリックする. H […] Webots講座3-2022:自動運転シミュレータ (Python) (2022-6-20) - Webots講座の3回目です.今回は,Webotsの自動運転シミュレータを使ってBMW X5をPython言語により直進させるところまでを学びます.BMWのオーナーになった気分でやっていきましょう! レファレンス Web […]
Webots講座3-2022:自動運転シミュレータ (Python) (2022-6-20) - Webots講座の3回目です.今回は,Webotsの自動運転シミュレータを使ってBMW X5をPython言語により直進させるところまでを学びます.BMWのオーナーになった気分でやっていきましょう! レファレンス Web […]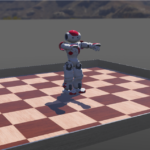 Webots講座2-2022:プログラミングしよう!(Python) (2022-6-14) - ブレイクの予感がするWebots講座の2回目です.さっそく,Pythonを使ってロボットを動かしてみましょう. レファレンス Webots User Guide (Cyberbotics, Inc.) 環 境 Windo […]
Webots講座2-2022:プログラミングしよう!(Python) (2022-6-14) - ブレイクの予感がするWebots講座の2回目です.さっそく,Pythonを使ってロボットを動かしてみましょう. レファレンス Webots User Guide (Cyberbotics, Inc.) 環 境 Windo […] Webots講座1-2022:インストールとデモの鑑賞 (2022-6-14) - Webotsって何? 最近,Webotsというロボットシミュレータを良く耳にしませんか?ロボカップジュニア世界大会2021がオンライン開催になり,サッカーチャレンジをはじめとする複数のリーグでWebotsを使った競技が開 […]
Webots講座1-2022:インストールとデモの鑑賞 (2022-6-14) - Webotsって何? 最近,Webotsというロボットシミュレータを良く耳にしませんか?ロボカップジュニア世界大会2021がオンライン開催になり,サッカーチャレンジをはじめとする複数のリーグでWebotsを使った競技が開 […] ロボット知能工学特論2022:第2週 確率・統計の基礎 (2022-4-19) - このページは金沢工業大学大学院機械工学専攻ロボット知能工学特論のサポートページです。第2週は教科書を使っていく上でのソフトウェアのインストールとその使い方のハンズオンとなります。 教科書 詳細 確率ロボティクス -Pyt […]
ロボット知能工学特論2022:第2週 確率・統計の基礎 (2022-4-19) - このページは金沢工業大学大学院機械工学専攻ロボット知能工学特論のサポートページです。第2週は教科書を使っていく上でのソフトウェアのインストールとその使い方のハンズオンとなります。 教科書 詳細 確率ロボティクス -Pyt […]VNC Viewer (2022-3-22) - VNC Viewerのおすすめを知り合いの先生から聞いたのでメモ Windows10 Tightvnc 以下のサイトからダウンロード. https://www.tightvnc.com/download.php View […]
 Docker:コマンド (2022-3-13) - Dockerのコマンドメモ コンテナ 実行と停止 実行 $ docker start <コンテナIDまたはコンテナ名> 停止 $ docker stop <コンテナIDまたはコンテナ名> コンテナ […] Docker: エラーと解決法OCI runtime create failed: permission denied: unknown. (2022-3-11) - Dockerで遭遇したエラーとその解決法の忘備録 1 . Dockerイメージをやっと作成できて,docker runで起動しようとしたところ以下のエラーで悩まされたので忘備録. エラーメッセージ sudo docker […] Ubuntu20.04:Dockerのインストール (2022-3-11) - DockerをUbuntu20.04にインストールしたときのメモ。Dockerの公式サイトdocs.docker.comに従っている。 参考サイト Install Docker Engine on Ubun […]
Docker:コマンド (2022-3-13) - Dockerのコマンドメモ コンテナ 実行と停止 実行 $ docker start <コンテナIDまたはコンテナ名> 停止 $ docker stop <コンテナIDまたはコンテナ名> コンテナ […] Docker: エラーと解決法OCI runtime create failed: permission denied: unknown. (2022-3-11) - Dockerで遭遇したエラーとその解決法の忘備録 1 . Dockerイメージをやっと作成できて,docker runで起動しようとしたところ以下のエラーで悩まされたので忘備録. エラーメッセージ sudo docker […] Ubuntu20.04:Dockerのインストール (2022-3-11) - DockerをUbuntu20.04にインストールしたときのメモ。Dockerの公式サイトdocs.docker.comに従っている。 参考サイト Install Docker Engine on Ubun […] WSL2:NvidiaのGPUを使う設定 (2022-2-5) - RTX3070が搭載されたThinkPad X1 extremeを入手できたので,WSL2でNvidia RTX 3070Laptop GPUを使うための設定メモ.私の場合,WSLのカーネルバージョンが古いのに気が付かず […]
WSL2:NvidiaのGPUを使う設定 (2022-2-5) - RTX3070が搭載されたThinkPad X1 extremeを入手できたので,WSL2でNvidia RTX 3070Laptop GPUを使うための設定メモ.私の場合,WSLのカーネルバージョンが古いのに気が付かず […]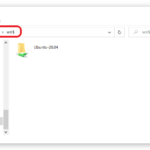 WSL2:WindowsとUbuntuのファイルやり取り (2022-2-5) - WSL2(Windows Subsystem for Linux)でWindowsとUbuntu間でファイルをやり取りする方法。 Windows → Ubuntuへのファイルアクセス エクスプローラーを起動し,下図で赤丸 […]
WSL2:WindowsとUbuntuのファイルやり取り (2022-2-5) - WSL2(Windows Subsystem for Linux)でWindowsとUbuntu間でファイルをやり取りする方法。 Windows → Ubuntuへのファイルアクセス エクスプローラーを起動し,下図で赤丸 […] WSL2:Ubuntu20.04のインストール (2022-2-3) - WSL2 (Windows Subsystem for Linux)にUbuntu20.04をインストールしたのでそのメモ。以下のサイトを参考にした。 参考リンク Windows 10 用 Windows Subsyst […]
WSL2:Ubuntu20.04のインストール (2022-2-3) - WSL2 (Windows Subsystem for Linux)にUbuntu20.04をインストールしたのでそのメモ。以下のサイトを参考にした。 参考リンク Windows 10 用 Windows Subsyst […] Latexの設定 (2022-2-3) - VS CodeでLatexを使うときに設定したメモ。Latex関連以外の拡張機能も追加している。 Tex Liveのインストール。以下のサイトから install-tl-windows.exeをダウンロード実行する。ダブ […]
Latexの設定 (2022-2-3) - VS CodeでLatexを使うときに設定したメモ。Latex関連以外の拡張機能も追加している。 Tex Liveのインストール。以下のサイトから install-tl-windows.exeをダウンロード実行する。ダブ […] Ubuntu20.04:インストールと設定 (ThinkPad X1 Extreme Gen4) (2022-1-29) - Ubuntu20.04をThinkPad X1 Extreme Gen4にインストールと設定したのでその備忘録。ここでは、増設したSSD(Samsung 980 PRO 2TB)にインストールした。作業時間は1時間程度 […]
Ubuntu20.04:インストールと設定 (ThinkPad X1 Extreme Gen4) (2022-1-29) - Ubuntu20.04をThinkPad X1 Extreme Gen4にインストールと設定したのでその備忘録。ここでは、増設したSSD(Samsung 980 PRO 2TB)にインストールした。作業時間は1時間程度 […] Swapファイルの設定 (2022-1-29) - Ubuntu20.04でswapファイルを設定したのでそのメモ. TUF DASH F15はメモリを16GB搭載しているので、swapファイル2GBから32GBに拡大する。 まず、swapファイルを確認しよう。 $ sw […]
Swapファイルの設定 (2022-1-29) - Ubuntu20.04でswapファイルを設定したのでそのメモ. TUF DASH F15はメモリを16GB搭載しているので、swapファイル2GBから32GBに拡大する。 まず、swapファイルを確認しよう。 $ sw […] ROS2演習14-2021:Smachで作るステートマシーン (2022-1-20) - 本記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回はSmach(State Machine, スマッチと発音することが多いようです.)を使ったステートマシン(状態遷移機械)の作 […]
ROS2演習14-2021:Smachで作るステートマシーン (2022-1-20) - 本記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回はSmach(State Machine, スマッチと発音することが多いようです.)を使ったステートマシン(状態遷移機械)の作 […] LinuxでBox.comのクラウドストレージを使う方法 (2021-12-26) - LinuxでBox.comのクラウドストレージを使う方法を調べたら良い記事を見つけた.Box.comはWebDAVもうオフィシャルにはサポートしていながい今日試したところ使えた.これで少し幸せになれる. サーバー:dav […]
LinuxでBox.comのクラウドストレージを使う方法 (2021-12-26) - LinuxでBox.comのクラウドストレージを使う方法を調べたら良い記事を見つけた.Box.comはWebDAVもうオフィシャルにはサポートしていながい今日試したところ使えた.これで少し幸せになれる. サーバー:dav […] ROS2演習13-2021:ロボットアーム (2021-12-23) - 本記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今週はrvizを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは大阪電気通信大学の升谷先生 […]
ROS2演習13-2021:ロボットアーム (2021-12-23) - 本記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今週はrvizを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは大阪電気通信大学の升谷先生 […] ROS1とROS2の切り替え (2021-12-9) - 授業では科目によりROS1とROS2を使っているので,環境の切り替えが必要になります.ROS1とROS2で以下のコマンドを最低,実行する必要がありますが,普通は毎回,打ち込むのは面倒なので.bashrcに書く場合が多いで […]
ROS1とROS2の切り替え (2021-12-9) - 授業では科目によりROS1とROS2を使っているので,環境の切り替えが必要になります.ROS1とROS2で以下のコマンドを最低,実行する必要がありますが,普通は毎回,打ち込むのは面倒なので.bashrcに書く場合が多いで […]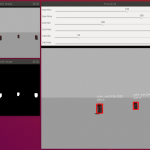 ロボットプログラミングⅡ-2021:ROS2演習12 – 基礎的な物体検出器をPythonで作ろう!で画像処理をしよう! (2021-12-9) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. カメラから取得した画像データをOpenCVを使い画像処理することを学んだので、今回は物体検出のプログラムを作ってみましょ […]
ロボットプログラミングⅡ-2021:ROS2演習12 – 基礎的な物体検出器をPythonで作ろう!で画像処理をしよう! (2021-12-9) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. カメラから取得した画像データをOpenCVを使い画像処理することを学んだので、今回は物体検出のプログラムを作ってみましょ […]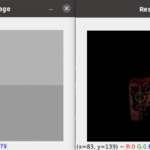 ロボットプログラミングⅡ-2021:ROS2演習11 – OpenCVとPythonプログラムで画像処理をしよう! (2021-12-9) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、コンピュータビジョンライブラリの定番OpenCVをROSで使うためにcv_bridgeを用いたPythonプログ […]
ロボットプログラミングⅡ-2021:ROS2演習11 – OpenCVとPythonプログラムで画像処理をしよう! (2021-12-9) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、コンピュータビジョンライブラリの定番OpenCVをROSで使うためにcv_bridgeを用いたPythonプログ […]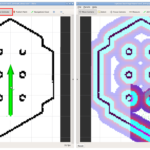 ロボットプログラミングⅡ-2021:ROS2演習10 – ナビゲーション (2021-12-2) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回はシミュレータを使ったSLAMについて学びます. なお,この記事は次のサイトを参考にしました. https://em […]
ロボットプログラミングⅡ-2021:ROS2演習10 – ナビゲーション (2021-12-2) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回はシミュレータを使ったSLAMについて学びます. なお,この記事は次のサイトを参考にしました. https://em […]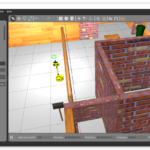 ロボットプログラミングⅡ-2021:ROS2演習9 – SLAM (2021-12-1) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回のテーマはSLAMです.ROS2 Foxyの標準SLAMパッケージはslam_toolboxです.この使い方について […]
ロボットプログラミングⅡ-2021:ROS2演習9 – SLAM (2021-12-1) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回のテーマはSLAMです.ROS2 Foxyの標準SLAMパッケージはslam_toolboxです.この使い方について […] ロボットプログラミングⅡ-2021:ROS2演習8 – Happy Miniをプログラムで動かそう!(Python) (2021-12-1) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、Happy MiniをPythonプログラムで動かします。 ソースコード 今回使用するソースコードです。コード中 […]
ロボットプログラミングⅡ-2021:ROS2演習8 – Happy Miniをプログラムで動かそう!(Python) (2021-12-1) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、Happy MiniをPythonプログラムで動かします。 ソースコード 今回使用するソースコードです。コード中 […]ROS2:Gazeboエラー (2021-11-27) - ROS2でTurtlebot3 Gazebo Simulation実行時のエラーとその解決法のメモ 実行コマンド $ ros2 launch turtlebot3_gazebo empty_world.launch.py […]
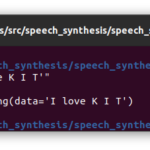 ロボットプログラミングⅡ-2021:ROS2演習7-音声合成 (Python) (2021-11-18) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回も音声認識と同様にPythonライブラリをROS2化します。使用する音声合成ライブラリはgTTS(Google Te […]
ロボットプログラミングⅡ-2021:ROS2演習7-音声合成 (Python) (2021-11-18) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回も音声認識と同様にPythonライブラリをROS2化します。使用する音声合成ライブラリはgTTS(Google Te […]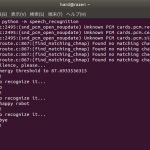 ロボットプログラミングⅡ-2021:ROS2演習6-音声認識 (Python) (2021-11-17) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. SpeechRecognitionというPythonの音声認識ライブラリはご存知でしょうか。CMU Sphinx、Goo […]
ロボットプログラミングⅡ-2021:ROS2演習6-音声認識 (Python) (2021-11-17) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. SpeechRecognitionというPythonの音声認識ライブラリはご存知でしょうか。CMU Sphinx、Goo […] ロボットプログラミングⅡ-2021:ROS2演習5-サービス通信しよう!(Python) (2021-11-4) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、ROS2のもう一つの通信方式であるサービスとそれをPythonで実現する方法を学びましょう! コンテンツ サービ […]
ロボットプログラミングⅡ-2021:ROS2演習5-サービス通信しよう!(Python) (2021-11-4) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、ROS2のもう一つの通信方式であるサービスとそれをPythonで実現する方法を学びましょう! コンテンツ サービ […] ロボットプログラミングⅡ-2021:ROS2演習4-トピック通信しよう!(Python) (2021-11-4) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、ROS2の通信方式であるトピックとそれをPythonで実現する方法を学びましょう!詳細なコンテンツは次のとおりで […]
ロボットプログラミングⅡ-2021:ROS2演習4-トピック通信しよう!(Python) (2021-11-4) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 今回は、ROS2の通信方式であるトピックとそれをPythonで実現する方法を学びましょう!詳細なコンテンツは次のとおりで […]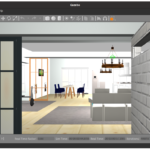 ロボットプログラミングⅡ-2021:ROS2演習3b-GazeboシミュレータでCreate3を動かそう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. GazeboシミュレータでiRobot社のCreate3を動かしましょう!Create3はルンバでおなじみのiRobot […]
ロボットプログラミングⅡ-2021:ROS2演習3b-GazeboシミュレータでCreate3を動かそう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. GazeboシミュレータでiRobot社のCreate3を動かしましょう!Create3はルンバでおなじみのiRobot […] ロボットプログラミングⅡ-2021:ROS2演習3a-Webotsシミュレータでルンバを動かそう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. WebotsシミュレータでiRobot社のCreate2を動かしましょう!本記事ではカナダのSimon Fraser U […]
ロボットプログラミングⅡ-2021:ROS2演習3a-Webotsシミュレータでルンバを動かそう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. WebotsシミュレータでiRobot社のCreate2を動かしましょう!本記事ではカナダのSimon Fraser U […] ロボットプログラミングⅡ-2021:ROS2演習2-はじめてのROS2プログラミング(Python) (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 演習2では次の内容を学び,Pythonを使ったROS2プログラミングを体験します. 内 容 ワークスペース パッケージ […]
ロボットプログラミングⅡ-2021:ROS2演習2-はじめてのROS2プログラミング(Python) (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. 演習2では次の内容を学び,Pythonを使ったROS2プログラミングを体験します. 内 容 ワークスペース パッケージ […] ロボットプログラミングⅡ-2021:ROS2演習1-亀で遊ぼう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. ROSの定番であるタートルシム(turtlesim)でROS2を体験してみましょう。なお、タートルは海亀のことでROSの […]
ロボットプログラミングⅡ-2021:ROS2演習1-亀で遊ぼう! (2021-11-3) - この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です. ROSの定番であるタートルシム(turtlesim)でROS2を体験してみましょう。なお、タートルは海亀のことでROSの […] 専門実験2021(ロボット制御):開発環境のインストール (2021-10-8) - 2021年度後学期 金沢工業大学 ロボティクス学科 専門実験(ロボット制御)では,授業中に配布するUbuntu20.04インストール済みのUSBメモリを使って実際のロボットで実習しますが,自宅でも課題等を行えるように各人 […]
専門実験2021(ロボット制御):開発環境のインストール (2021-10-8) - 2021年度後学期 金沢工業大学 ロボティクス学科 専門実験(ロボット制御)では,授業中に配布するUbuntu20.04インストール済みのUSBメモリを使って実際のロボットで実習しますが,自宅でも課題等を行えるように各人 […]