この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です.

WebotsシミュレータでiRobot社のCreate2を動かしましょう!本記事ではカナダのSimon Fraser University, Autonomy Lab.のJacob PerronさんのフォークしたiRobot社のRoomba, Create2用のROS2ドライバー create2_autonomyを使います。
- 参考サイト
- 環境
- Ubuntu20.04
- ROS2 Foxy
- 準備
$ sudo apt update$ sudo apt upgrade$ sudo apt install -y python3-rosdep python3-colcon-common-extensions$ sudo apt install build-essential python3-colcon-mixin python3-vcstool
- Webotsのインストール
$ sudo apt -y install ros-foxy-webots-ros2
- Create2関連パッケージのインストール
- ワークスペースの生成
- ディレクトリの作成
$ mkdir -p ~/airobot_ws/src$ cd ~/airobot_ws
- ビルド
$ colcon build
- 設定ファイルの実行
$ source install/local_setup.bash$ source install/setup.bash
- ディレクトリの作成
- ダウンロード
- ディレクトリの移動
$ cd ~/airobot_ws/src
- libcreateのクローン(ダウンロード)
$ git clone https://github.com/AutonomyLab/libcreate
- create2_autonomyのクローン
$ git clone https://github.com/RoboticaUtnFrba/create2_autonomy.git
- create2_hardwareのクローン
$ git clone https://github.com/RoboticaUtnFrba/create2_hardware.git
- create2_utilitiesのクローン。これはiRobot Create2のグラフィカルとテストツール。
$ git clone https://github.com/RoboticaUtnFrba/create2_utilities.git
- create2_descriptionのクローン。これはiRobotCreate2のWebots用のモデル記述パッケージ。
$ git clone https://github.com/RoboticaUtnFrba/create2_description.git
- webots_ros2のクローン。ROS2のWebotsパッケージ。
$ git clone https://github.com/RoboticaUtnFrba/webots_ros2.git
- ディレクトリの移動
- 依存関係ファイルのインストール
- 必要なパッケージのインストール
$ sudo apt -y install ros-foxy-image-pipeline$ sudo apt -y install bash-completion dirmngr gnupg2 lsb-release ros-foxy-diagnostic-updater$ pip3 install -U argcomplete flake8 flake8-blind-except flake8-builtins flake8-class-newline flake8-comprehensions flake8-deprecated flake8-docstrings$ pip3 install -U flake8-import-order flake8-quotes pytest-repeat pytest-rerunfailures
- 他のファイルのインストール
$ cd ~/airobot_ws$ rosdep update$ rosdep install --from-paths src -yi
- 必要なパッケージのインストール
- ワークスペースのビルド
$ cd ~/airobo_ws/src/webots_ros2/webots_ros2_importer/webots_ros2_importer/urdf2webots$ git clone https://github.com/cyberbotics/urdf2webots.git$ cd urdf2webots$ pip3 install -r requirements.txt$cp ./urdf2webots/__init__.py .$ cd ~/airobot_ws$ colcon build- 私の環境では約3分でビルドが終了した。
- ワークスペースの生成
- 設 定
- 次のコマンドでエディタgeditを使い.bashrcファイルを開き、sourceで始まる2行の設定を末尾にコピペして保存する。
$ gedit ~/.bashrc
- 次のコマンドでエディタgeditを使い.bashrcファイルを開き、sourceで始まる2行の設定を末尾にコピペして保存する。
source /opt/ros/foxy/setup.bash source ~/airobot_ws/install/local_setup.bash
-
- ROS2ではroscdコマンドの代わりにcolcon_cdコマンドを使う。これを使うとworkspaceのディレクトリ(この例では~/airobo_ws/src/各パッケージディレクトリ)に移動できる。次のコマンドを実行して~/.bashrcに追加する。
$ echo "source /usr/share/colcon_cd/function/colcon_cd.sh" >> ~/.bashrc$ echo "export _colcon_cd_root=~/airobot_ws" >> ~/.bashrc
- 以下のコマンドを実行して設定を反映させる。
$ source ~/.bashrc
- ROS2ではroscdコマンドの代わりにcolcon_cdコマンドを使う。これを使うとworkspaceのディレクトリ(この例では~/airobo_ws/src/各パッケージディレクトリ)に移動できる。次のコマンドを実行して~/.bashrcに追加する。
- 実 行
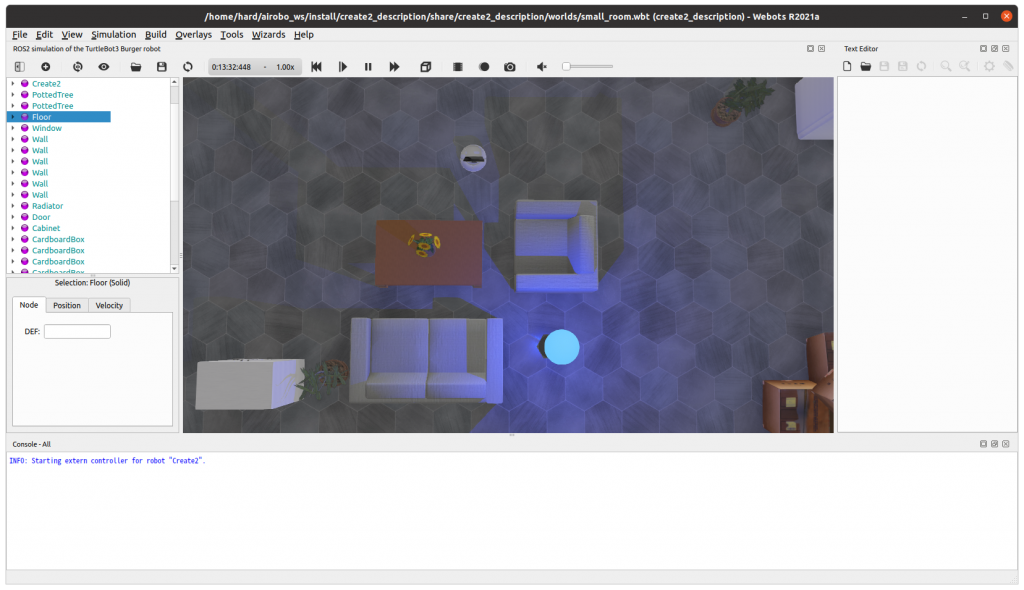
- 新たに端末を開き、以下のコマンドを実行してシミュレータWebotsを起動する。一番下図のルンバをベースにしたロボットが現れる。ros1ではlaunchファイルの起動はroslaunchだったが、ros2ではros2 launchとros2とlaunchの間にスペースを入れる。launchファイルがxmlフォーマットの他にpythonでも書けるようになった。うまく実行されるとトップのような画像が表示される。なお,Webotsがインストールされていない状態で以下のコマンドを実行するとインストールするか聞かれるので’Y’キーを押すとインストールしてくれる.
$ ros2 launch create2_description spawn_robot.launch.py- エラーが出る場合
- FATAL: Webots requires OpenGL 3.3 while only OpenGL 1.4 can be initialized.
- 上記のエラーが出る場合は,次のコマンドで必要なファイルをインストールする.
$ sudo apt install libgl1-mesa-dev xorg-dev
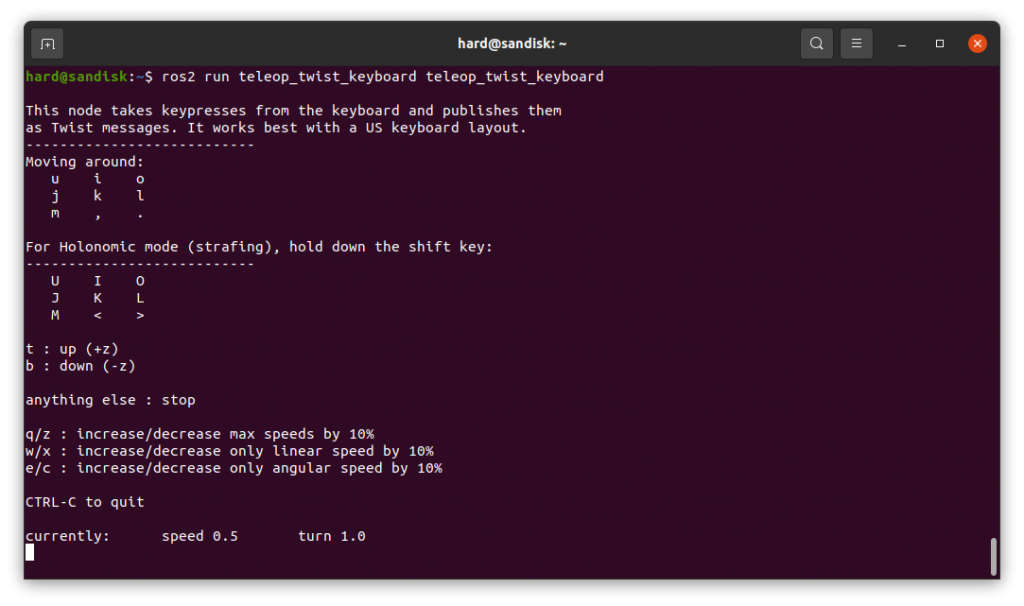
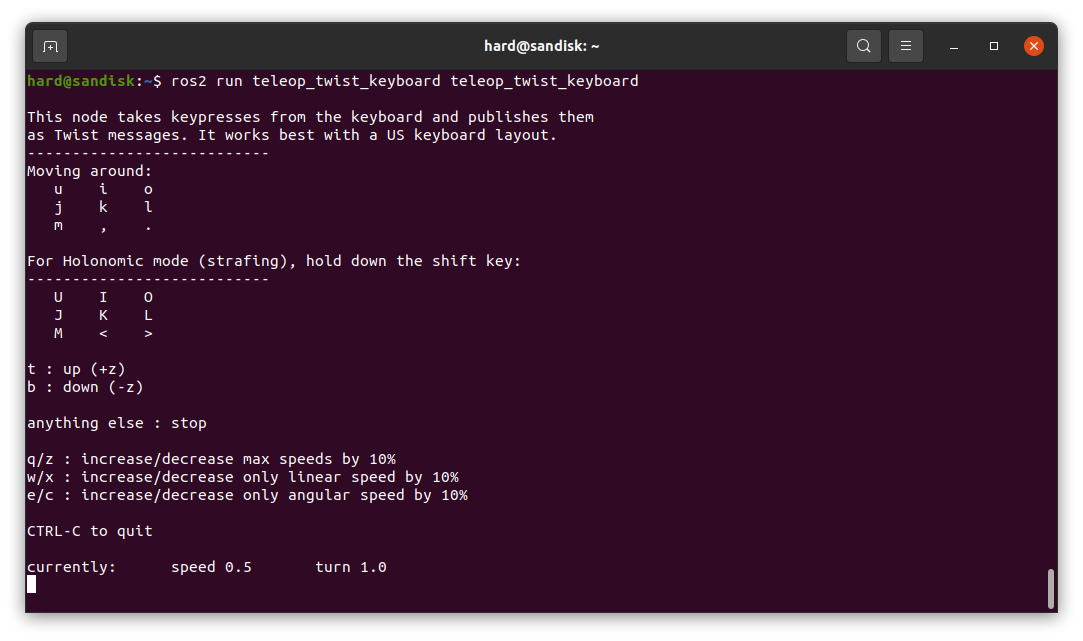
- 端末をもう一つ新たに開き、以下のコマンドを実行してシミュレータ上のルンバを遠隔制御する。ros1ではノードの実行はrosrunコマンドだったが、ros2ではros2 runコマンドとなる。これもros2とrunの間にスペースが必要。
$ ros2 run teleop_twist_keyboard teleop_twist_keyboard- 以下の画面になる。以下のキー操作でロボットを動かすことができる。なお、マウスのカーソルがこの2番目に開いた端末上にないとロボットは動かないので注意。
- i: 前進、u:左前進、o:右前進
- j: 左回転、k:停止、 l:右回転
- m:左後進、,:後進、 .:右後進
- スペース:停止
- w/x:並進速度増速/減速(10%)
- e/c:角速度増速/減速(10%)
- 新たに端末を開き、以下のコマンドを実行してシミュレータWebotsを起動する。一番下図のルンバをベースにしたロボットが現れる。ros1ではlaunchファイルの起動はroslaunchだったが、ros2ではros2 launchとros2とlaunchの間にスペースを入れる。launchファイルがxmlフォーマットの他にpythonでも書けるようになった。うまく実行されるとトップのような画像が表示される。なお,Webotsがインストールされていない状態で以下のコマンドを実行するとインストールするか聞かれるので’Y’キーを押すとインストールしてくれる.
- 無事に動いたら成功。お疲れ様!
終わり
コメント