この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です.
GazeboシミュレータでiRobot社のCreate3を動かしましょう!Create3はルンバでおなじみのiRobot社が開発した教育用ロボットで2022年4月頃発売予定のものです.発売前にもうROS2パッケージがでているんですね.
本記事ではiRobot EducationがGithubで公開しているCreate3用のROS2パッケージを使います.
- 参考サイト
- 環 境
- Ubuntu20.04
- ROS2 Foxy
- 準 備
$ sudo apt update$ sudo apt upgrade- ワークスペースの作成
$ mkdir -p airobot_ws/src
- Create3 Simulatorのインストール
- 移動と依存関係のパッケージのインストール
$ cd ~/airobot_ws/src
- リポジトリのクローン
$ git clone -b foxy https://github.com/iRobotEducation/create3_sim.git
- 依存関係のあるパッケージのインストール
$ sudo apt install python3-vcstool$ vcs import ~/airobot_ws/src/ < ~/airobot_ws/src/create3_sim/dependencies.repos
- ワークスペースへの移動とROS2の依存パッケージのインストール
$ cd ~/airobot_ws$ rosdep install --from-path src -yi
- ビルド
colcon build --symlink-installsource install/local_setup.bash
- 移動と依存関係のパッケージのインストール
- 実 行
- Empty World
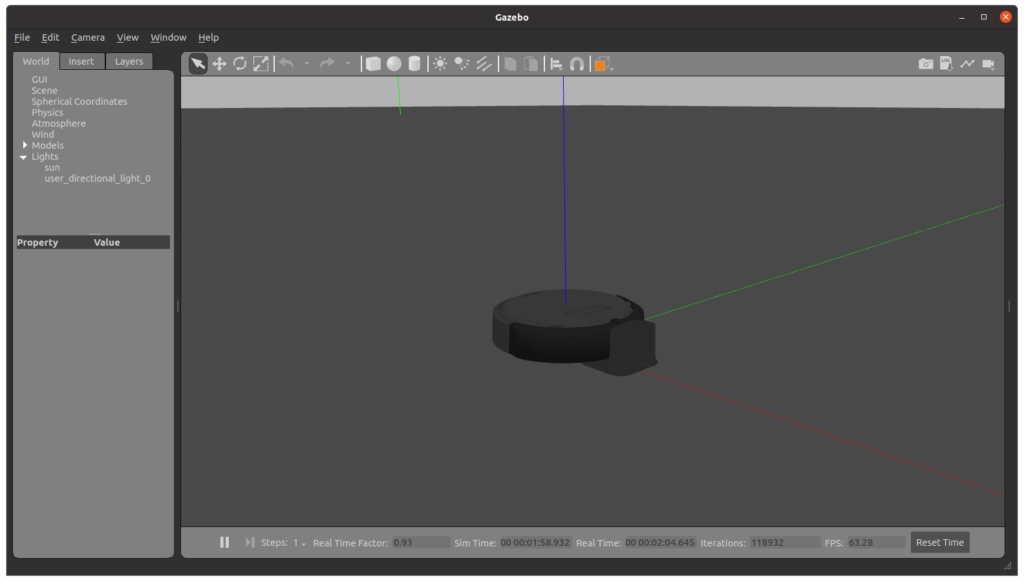
- 以下のコマンドでGazeboのCreate3以外は存在しないワールドが生成され,Rvizも同時に起動される.
$ ros2 launch irobot_create_gazebo create3.launch.py
- 以下のコマンドでGazeboのCreate3以外は存在しないワールドが生成され,Rvizも同時に起動される.
- Empty World
- AWS house
- GazeboのAWSハウス環境のインストール
$ vcs import ~/airobot_ws/src/ < ~/airobot_ws/src/create3_sim/demo.repos$ cd ~/airobot_ws$ colcon build --symlink-install$ source install/local_setup.bash
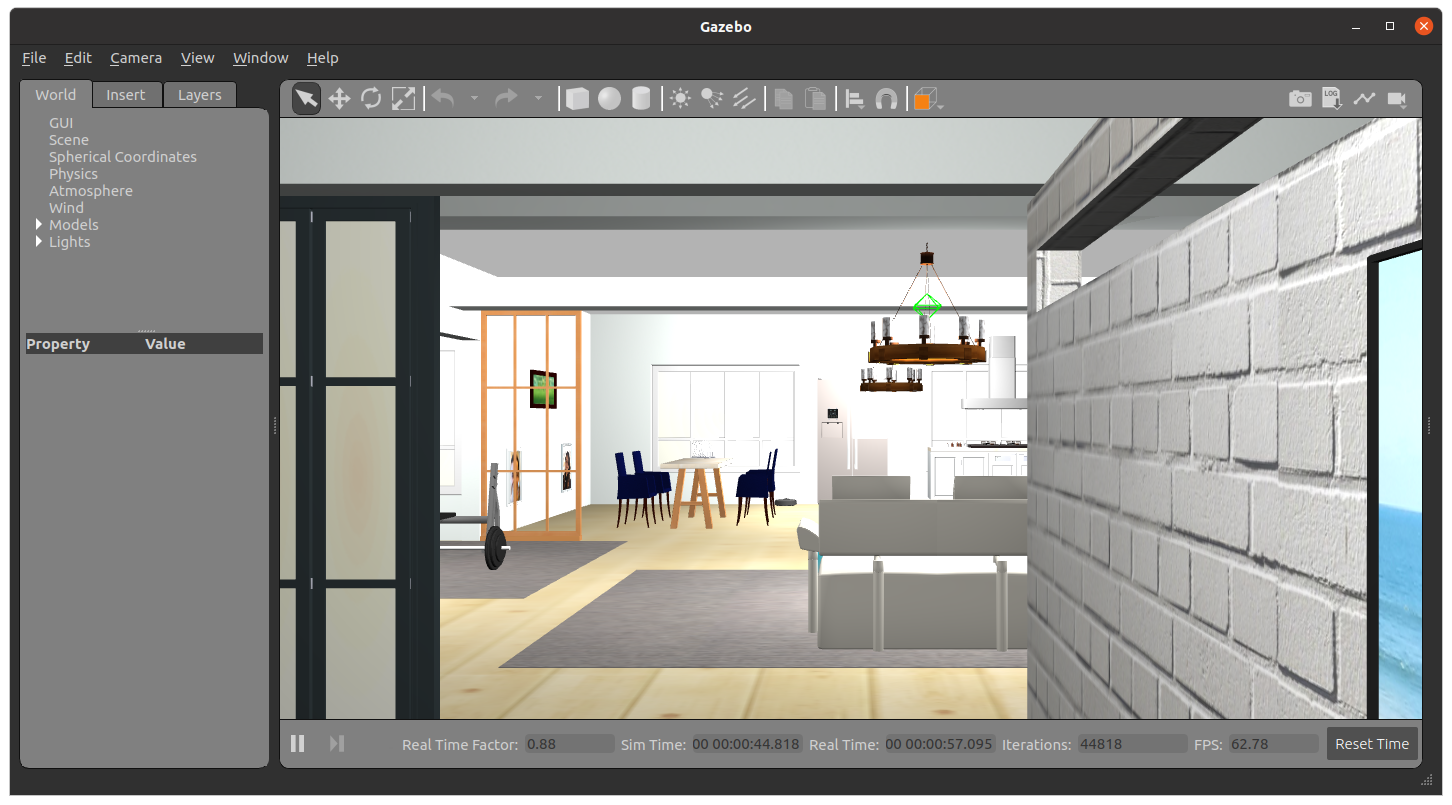
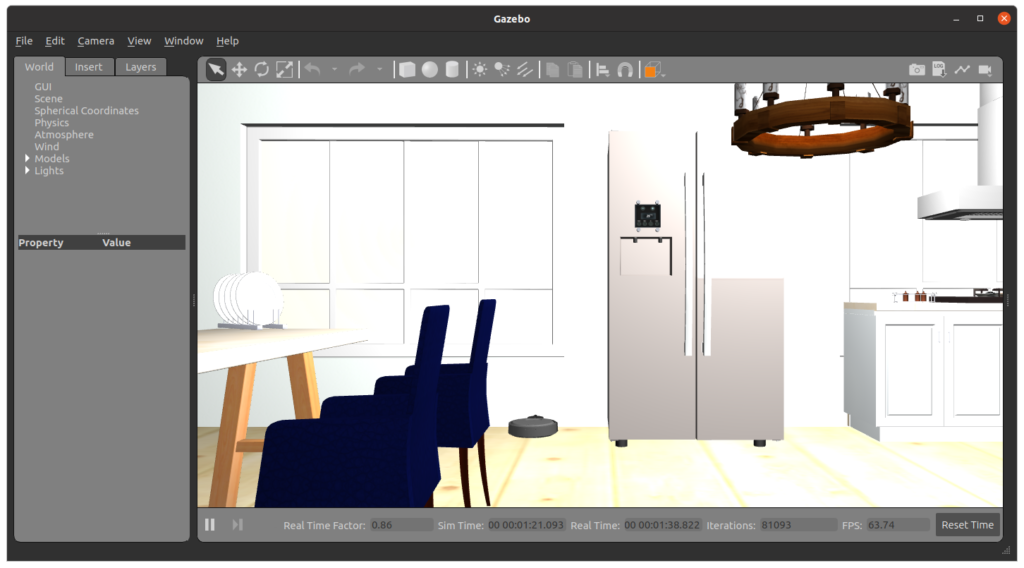
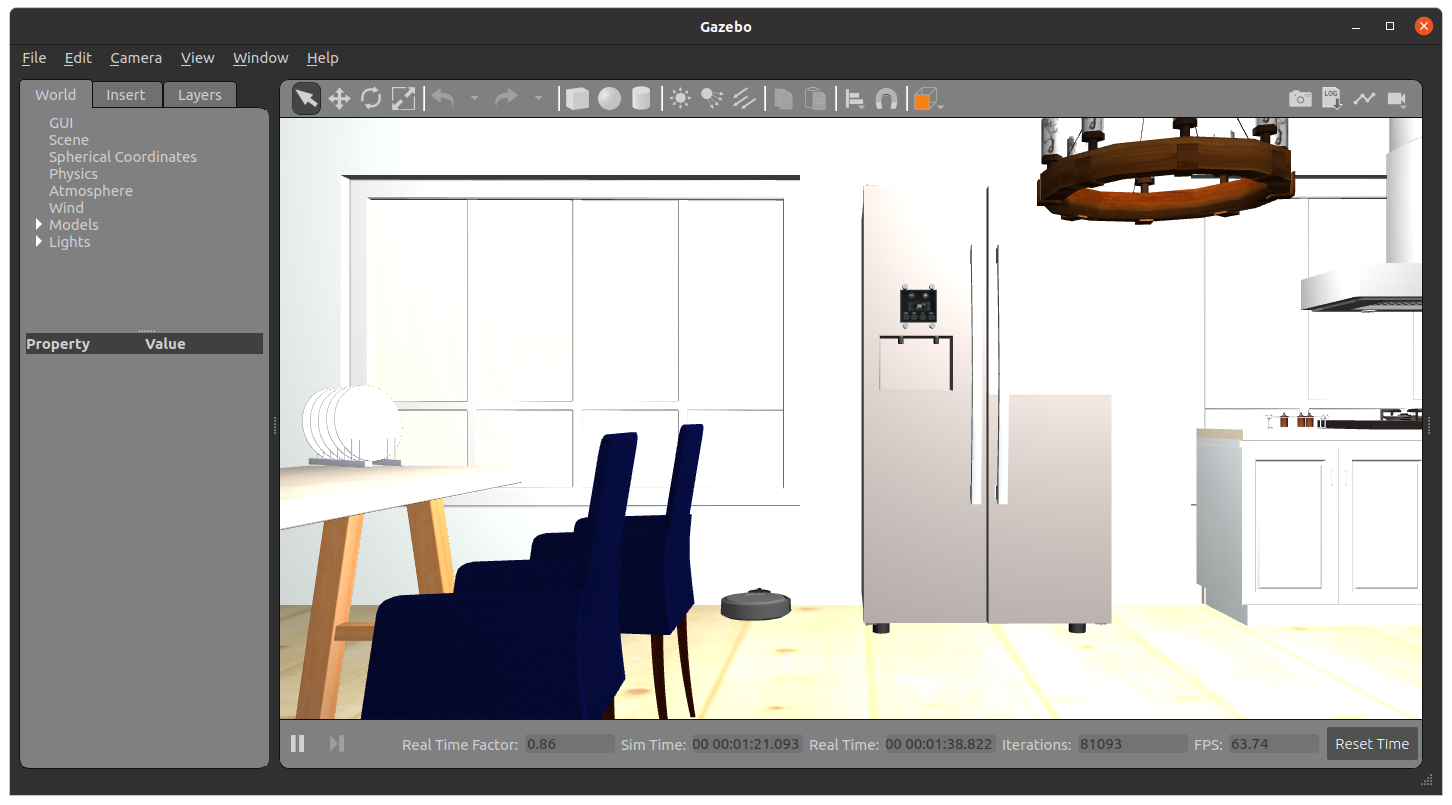
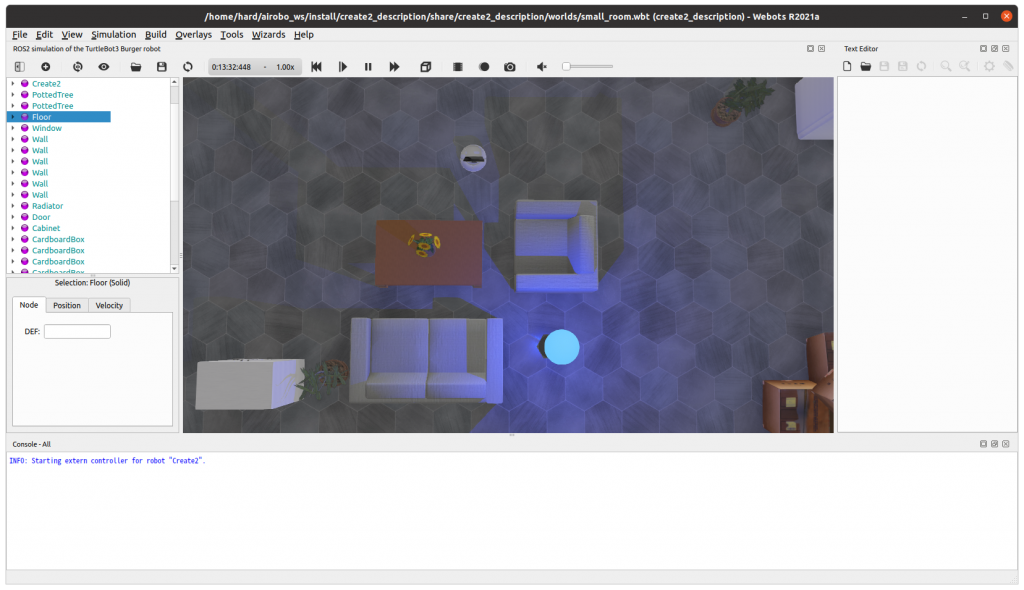
- 以下のコマンドでGazeboのAWSハウス環境とRvizが起動する.下図のようにな部屋の環境が現れたら成功.
$ ros2 launch irobot_create_gazebo aws_small.launch.py
- 端末をもう一つ新たに開き、以下のコマンドを実行してGazebo上のcreate3を遠隔制御する。
$ ros2 launch irobot_create_toolbox teleop_keyboard.launch.py- 新しい端末が開く.以下のキー操作でロボットを動かすことができる。なお、マウスのカーソルがこの新しく開いた端末上にないとロボットは動かないので注意。
- i: 前進、u:左前進、o:右前進
- j: 左回転、k:停止、 l:右回転
- m:左後進、,:後進、 .:右後進
- スペース:停止
- 無事に動いたら成功!お疲れ様.
- GazeboのAWSハウス環境のインストール
終わり
コメント