 lecture
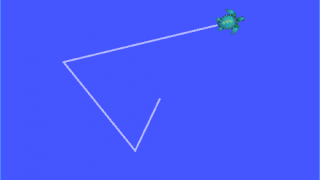
lecture ROS演習1-2018: タートルで遊ぼう!
この記事は私が金沢工業大学ロボティクス学科で担当している2018年度後学期開講講義ロボットプログラミングⅡ用です。Windows Subsystem for Linux(WSL)にROSをインストール...
lecture  deeplearning
deeplearning  deeplearning
deeplearning  deeplearning
deeplearning  misc
misc  robocup@home
robocup@home 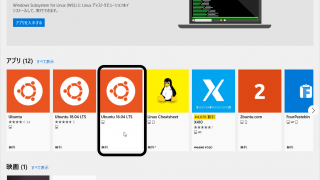 lecture
lecture  lecture
lecture  lecture
lecture  misc
misc  robocup@home
robocup@home  robocup@home
robocup@home  lecture
lecture  misc
misc  misc
misc 