
 Raspberry Pi4 (メモリ4GB): Ubuntu18.04 + Xubuntu Desktopのインストールと設定 (2020-5-6) - Raspberry Pi4にUbuntu 18.04をインストールしたときのメモ。このメモはPi4の4GB RAM用です。メモリ8GBの場合、ここで紹介しているプリインストールサーバーイメージをインストールするとブートが […]
Raspberry Pi4 (メモリ4GB): Ubuntu18.04 + Xubuntu Desktopのインストールと設定 (2020-5-6) - Raspberry Pi4にUbuntu 18.04をインストールしたときのメモ。このメモはPi4の4GB RAM用です。メモリ8GBの場合、ここで紹介しているプリインストールサーバーイメージをインストールするとブートが […] コンピュータ工学Ⅰ:まとめ (2020-4-27) - この記事はKITロボティクス学科コンピュータ工学Ⅰ用のまとめ記事です。 プログラミング言語:VS Code (VSCodium)のインストールこの記事はKITロボティクス学科プログラミング言語の授業用です。ロボティクス学 […]
コンピュータ工学Ⅰ:まとめ (2020-4-27) - この記事はKITロボティクス学科コンピュータ工学Ⅰ用のまとめ記事です。 プログラミング言語:VS Code (VSCodium)のインストールこの記事はKITロボティクス学科プログラミング言語の授業用です。ロボティクス学 […] OnlineJudge:まとめ (2020-4-25) - オープンソースのオンラインジャッジOnlineJudge2.0の設定方法です。オンラインジャッジとはプログラミングの問題をオンラインで採点するシステムのことで、これは中国の青島大学が開発しています。本記事はOnlineJ […]
OnlineJudge:まとめ (2020-4-25) - オープンソースのオンラインジャッジOnlineJudge2.0の設定方法です。オンラインジャッジとはプログラミングの問題をオンラインで採点するシステムのことで、これは中国の青島大学が開発しています。本記事はOnlineJ […] OnlineJudge: オンラインジャッジの使い方 (2020-4-25) - オープンソースのオンラインジャッジOnlineJudge2.0の設定方法です。オンラインジャッジとはプログラミングの問題をオンラインで採点するシステムのことで、これは中国の青島大学が開発しています。 本記事ではその使い方 […] コンピュータ工学Ⅰ:オンラインジャッジの使い方 (2020-4-25) - この記事はKITロボティクス学科コンピュータ工学Ⅰ用です。授業ではプログラミング問題のオンライン採点システムであるオンラインジャッジOnlineJudge2.0を使います。本記事ではその使い方を説明します。 ログイン F […]
OnlineJudge: オンラインジャッジの使い方 (2020-4-25) - オープンソースのオンラインジャッジOnlineJudge2.0の設定方法です。オンラインジャッジとはプログラミングの問題をオンラインで採点するシステムのことで、これは中国の青島大学が開発しています。 本記事ではその使い方 […] コンピュータ工学Ⅰ:オンラインジャッジの使い方 (2020-4-25) - この記事はKITロボティクス学科コンピュータ工学Ⅰ用です。授業ではプログラミング問題のオンライン採点システムであるオンラインジャッジOnlineJudge2.0を使います。本記事ではその使い方を説明します。 ログイン F […] OnlineJudge:オンラインジャッジの設定 (2020-4-23) - オープンソースのオンラインジャッジOnlineJudge2.0の設定方法です。オンラインジャッジとはプログラミングの問題をオンラインで採点するシステムのことで、これは中国の青島大学が開発しています。 ライセンスはMIT。 […]
OnlineJudge:オンラインジャッジの設定 (2020-4-23) - オープンソースのオンラインジャッジOnlineJudge2.0の設定方法です。オンラインジャッジとはプログラミングの問題をオンラインで採点するシステムのことで、これは中国の青島大学が開発しています。 ライセンスはMIT。 […] 夢考房RoboCup@Homeプロジェクトのオンライン説明会実施中 (2020-4-22) - 私が携わっている夢考房RoboCup@Homeプロジェクトのオンライン説明会のリンクを紹介します。ちょっとこのクオリティには驚きました。当たり前ですが24時間いつでもご覧になれます。コロナの影響でKIT夢考房の閉鎖中です […]
夢考房RoboCup@Homeプロジェクトのオンライン説明会実施中 (2020-4-22) - 私が携わっている夢考房RoboCup@Homeプロジェクトのオンライン説明会のリンクを紹介します。ちょっとこのクオリティには驚きました。当たり前ですが24時間いつでもご覧になれます。コロナの影響でKIT夢考房の閉鎖中です […] ROS新人教育プログラム:Linuxのお勉強 (2020-4-22) - ROS新人教育プログラムを始める前の準備です。ロボットを動かすコンピュータのOSとなるLinuxを勉強しましょう。 Linuxのインストール まず、ノートパソコンにLinuxをインストールします。インストール作業で失敗す […]
ROS新人教育プログラム:Linuxのお勉強 (2020-4-22) - ROS新人教育プログラムを始める前の準備です。ロボットを動かすコンピュータのOSとなるLinuxを勉強しましょう。 Linuxのインストール まず、ノートパソコンにLinuxをインストールします。インストール作業で失敗す […] ROS新人教育プログラム:Pythonのお勉強 (2020-4-22) - ROS新人教育プログラムを始める準備としてのPython勉強法です。PythonはAIだけでなくロボットでも最近多く使われています。ロボットエンジニアにも必要な言語になるでしょう。ROSもC++言語に加えてPythonを […]
ROS新人教育プログラム:Pythonのお勉強 (2020-4-22) - ROS新人教育プログラムを始める準備としてのPython勉強法です。PythonはAIだけでなくロボットでも最近多く使われています。ロボットエンジニアにも必要な言語になるでしょう。ROSもC++言語に加えてPythonを […] OnlineJudge :プログラミング問題をオンラインで採点するオンラインジャッジのインストールと実行 (2020-4-21) - オンラインジャッジとはプログラミングの問題をオンラインで採点するシステム。競技プログラミングや教育にも使われています。日本ではAizu Online Judgeが有名ですね。 2年前からOnline Judgeサーバーを […]
OnlineJudge :プログラミング問題をオンラインで採点するオンラインジャッジのインストールと実行 (2020-4-21) - オンラインジャッジとはプログラミングの問題をオンラインで採点するシステム。競技プログラミングや教育にも使われています。日本ではAizu Online Judgeが有名ですね。 2年前からOnline Judgeサーバーを […] Folding@home: インストール (Linux) (2020-4-18) - Folding@home(FAH)のUbuntuへのインストール方法を紹介します。この記事はUbuntu18.04で試しています。 なお、インストール、実行やチームへの参加は自己責任でお願いします。この活動で生じたあらゆ […]
Folding@home: インストール (Linux) (2020-4-18) - Folding@home(FAH)のUbuntuへのインストール方法を紹介します。この記事はUbuntu18.04で試しています。 なお、インストール、実行やチームへの参加は自己責任でお願いします。この活動で生じたあらゆ […] Folding@home:アンインストール(Linux) (2020-4-18) - アンインストール 現状では自動的にソフトウェアがアップグレードできない。アップグレードするときも、アンインストールしてから、新しいバージョンをインストールする。 Folding@homeではワークユニット(Work Un […]
Folding@home:アンインストール(Linux) (2020-4-18) - アンインストール 現状では自動的にソフトウェアがアップグレードできない。アップグレードするときも、アンインストールしてから、新しいバージョンをインストールする。 Folding@homeではワークユニット(Work Un […] Folding@home:まとめ (2020-4-15) - Folding@homeに関するdemura.netの記事をまとめました。石川県は新型コロナウイルス対策の初動が大きく遅れてしまい、人口当たりの感染者数は日本トップクラスです。私たち市民が何かできなかと思いチームKana […]
Folding@home:まとめ (2020-4-15) - Folding@homeに関するdemura.netの記事をまとめました。石川県は新型コロナウイルス対策の初動が大きく遅れてしまい、人口当たりの感染者数は日本トップクラスです。私たち市民が何かできなかと思いチームKana […] Folding@home:インストール(Windows) (2020-4-14) - 新型コロナウイルスが全世界で猛威をふるっています。全世界で協力してこの人類の敵を試すために我々ができることが手洗いや自宅に留まること以外にもあります。それは、治療法を開発するために新型コロナウイルス(SARS-CoV-2 […] Folding@Home Kanazawaメンバー募集中 (2020-4-11) - 人口あたりの新型コロナ感染者数は石川県が日本一になってしまいました(4/10現在)。この人類の危機を解決するためには治療薬を開発しかありません。それをみんなのPCで解決するのが国際プロジェクトFolding@Homeです […]
Folding@home:インストール(Windows) (2020-4-14) - 新型コロナウイルスが全世界で猛威をふるっています。全世界で協力してこの人類の敵を試すために我々ができることが手洗いや自宅に留まること以外にもあります。それは、治療法を開発するために新型コロナウイルス(SARS-CoV-2 […] Folding@Home Kanazawaメンバー募集中 (2020-4-11) - 人口あたりの新型コロナ感染者数は石川県が日本一になってしまいました(4/10現在)。この人類の危機を解決するためには治療薬を開発しかありません。それをみんなのPCで解決するのが国際プロジェクトFolding@Homeです […] KITロボティクス学科新入生へのアドバイス (2020-4-5) - KITロボティクス学科新入生の皆さん。ご入学おめでとうございます。ロボティクス学科の出村です。新型コロナウイルスの影響で学科全教員との対面式はなくなり、200字のメッセージしかお伝えすることはできませんでした。この記事で […]
KITロボティクス学科新入生へのアドバイス (2020-4-5) - KITロボティクス学科新入生の皆さん。ご入学おめでとうございます。ロボティクス学科の出村です。新型コロナウイルスの影響で学科全教員との対面式はなくなり、200字のメッセージしかお伝えすることはできませんでした。この記事で […]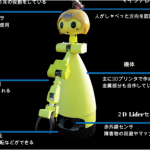
 RGB-Dセンサ:Structure CoreとRealSenseまとめ (2020-3-30) - Occipital社のStructure Core ColorとRealSense D435iの記事を一通り書いたのでまとめる。今回の簡易的な評価ではStructure Coreの方が3.75倍凸凹が少ない(推定平面に対 […]
RGB-Dセンサ:Structure CoreとRealSenseまとめ (2020-3-30) - Occipital社のStructure Core ColorとRealSense D435iの記事を一通り書いたのでまとめる。今回の簡易的な評価ではStructure Coreの方が3.75倍凸凹が少ない(推定平面に対 […] RGB-Dセンサ:CloudCompareを使いRealSense D435iとStructure Coreを比較してみた (2020-3-29) - RealSense D435iとStructure Coreを使いポイントクラウド(点群)からPLY形式の3Dファイルを取得できたので、点群とメッシュの編集ソフトCloudCompareを使って両者を定量的に比較してみた […]
RGB-Dセンサ:CloudCompareを使いRealSense D435iとStructure Coreを比較してみた (2020-3-29) - RealSense D435iとStructure Coreを使いポイントクラウド(点群)からPLY形式の3Dファイルを取得できたので、点群とメッシュの編集ソフトCloudCompareを使って両者を定量的に比較してみた […] Open3D:RealSenseを使った3次元点群処理 (2020-3-29) - 本記事は以下に示す秋月秀一先生の参考リンクをRealSense D435iを使ってやってみただけのメモ。第24回画像センシングシンポジウム(SSII2018)の チュートリアル講演「3D物体検出とロボットビジョンへの応用 […]
Open3D:RealSenseを使った3次元点群処理 (2020-3-29) - 本記事は以下に示す秋月秀一先生の参考リンクをRealSense D435iを使ってやってみただけのメモ。第24回画像センシングシンポジウム(SSII2018)の チュートリアル講演「3D物体検出とロボットビジョンへの応用 […] Open3D: インストールメモ (2020-3-29) - 3次元データ処理のオープンソースライブラリOpen3Dのインストールメモ。3次元データ処理ライブラリとしてはPCLが有名だが、Open3Dの方が簡単でコードも短くて済む。言語はpythonとC++をサポートしており、ライ […]
Open3D: インストールメモ (2020-3-29) - 3次元データ処理のオープンソースライブラリOpen3Dのインストールメモ。3次元データ処理ライブラリとしてはPCLが有名だが、Open3Dの方が簡単でコードも短くて済む。言語はpythonとC++をサポートしており、ライ […]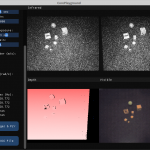 RGB-Dセンサ:Structure Coreの設定と表示 (2020-3-28) - Occipital社のRGB-DセンサStructure Core (color)の設定と表示のメモ。インストールや仕様は以下のリンクを参照。 RGB-Dセンサ:Structure Coreを試す RGB-Dセンサ:St […]
RGB-Dセンサ:Structure Coreの設定と表示 (2020-3-28) - Occipital社のRGB-DセンサStructure Core (color)の設定と表示のメモ。インストールや仕様は以下のリンクを参照。 RGB-Dセンサ:Structure Coreを試す RGB-Dセンサ:St […]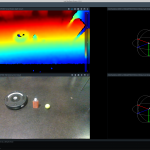 RGB-Dセンサ:RealSense D435i インストールメモ (2020-3-27) - RealSense D435iをROS Melodicで使うメモ。D435iはD435にIMUが搭載された新しい機種。D435と同じようにインストールできた。ROSのラッパーもありすぐ使える。このメモはRGB画像と深度画 […]
RGB-Dセンサ:RealSense D435i インストールメモ (2020-3-27) - RealSense D435iをROS Melodicで使うメモ。D435iはD435にIMUが搭載された新しい機種。D435と同じようにインストールできた。ROSのラッパーもありすぐ使える。このメモはRGB画像と深度画 […] RGB-Dセンサ:Structure CoreとRealSense 仕様比較 (2020-3-26) - Occipital社のRGB-DセンサStructure Core (color)を入手したので、RealSenseと比較してみた。この記事ではパッケージと仕様を比較する。Structure Coreカラー(SCS-Co […]
RGB-Dセンサ:Structure CoreとRealSense 仕様比較 (2020-3-26) - Occipital社のRGB-DセンサStructure Core (color)を入手したので、RealSenseと比較してみた。この記事ではパッケージと仕様を比較する。Structure Coreカラー(SCS-Co […] RoboCup@Home Education設立者による無料オンラインクラス開講 (2020-3-25) - RoboCup@Home Educationの設立者である中国南海大学Jeffery Tan教授が高校生向けにRoboCup@Home Educationのオンラインクラスルームを開講しています。これをみるとRoboCu […]
RoboCup@Home Education設立者による無料オンラインクラス開講 (2020-3-25) - RoboCup@Home Educationの設立者である中国南海大学Jeffery Tan教授が高校生向けにRoboCup@Home Educationのオンラインクラスルームを開講しています。これをみるとRoboCu […]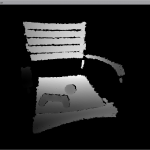 RGB-Dセンサ:Structure Coreを試す (2020-3-25) - Occipital社のRGB-DセンサStructure Core (color)を昨年12月の国際ロボット展で知った。商社の話によるとRealSenseの元開発者がその問題点を解決したのがこの製品らしい。これは買うしか […]
RGB-Dセンサ:Structure Coreを試す (2020-3-25) - Occipital社のRGB-DセンサStructure Core (color)を昨年12月の国際ロボット展で知った。商社の話によるとRealSenseの元開発者がその問題点を解決したのがこの製品らしい。これは買うしか […] demura.netのカスタマイズメモ (2020-3-22) - demura.netを全面的にリニューアルしました。そのカスタマイズのメモです。本サイトはオープンソースのブログ作成用ソフトウェアWordPressを使い、シンプルでカスタマイスがしやすい100%GPLのCocoonを使 […]
demura.netのカスタマイズメモ (2020-3-22) - demura.netを全面的にリニューアルしました。そのカスタマイズのメモです。本サイトはオープンソースのブログ作成用ソフトウェアWordPressを使い、シンプルでカスタマイスがしやすい100%GPLのCocoonを使 […] リニューアルしました。 (2020-3-19) - 現在、demura.netは1507件の投稿記事があり、先月は約31万ページビューでした。アクセスして頂きありがとうございます。 今まで、ページの速度が遅く、サイトの構成もわかりづらかったので、新聞社やウェブマガジン、女 […]
リニューアルしました。 (2020-3-19) - 現在、demura.netは1507件の投稿記事があり、先月は約31万ページビューでした。アクセスして頂きありがとうございます。 今まで、ページの速度が遅く、サイトの構成もわかりづらかったので、新聞社やウェブマガジン、女 […] Voyager18.04へ更新作業まとめ (2020-3-17) - Deep Learning用デスクトップPCにVoyager18.04をクリーンインストールして、各種ソフトウェアをインストールしたときの作業まとめ記事。 環 境 CROYDON (BTO組立パソコン) CPU: Int […]
Voyager18.04へ更新作業まとめ (2020-3-17) - Deep Learning用デスクトップPCにVoyager18.04をクリーンインストールして、各種ソフトウェアをインストールしたときの作業まとめ記事。 環 境 CROYDON (BTO組立パソコン) CPU: Int […] 深層学習:YOLOまとめ (2020-3-17) - 深層学習YOLO v3に関する本サイトのまとめ記事です。 Ubuntu18.04: Yolo V3 インストールメモUbuntu18.04にバージョンアップしたのでYolo V3のフレームワークdarknetをインストー […]
深層学習:YOLOまとめ (2020-3-17) - 深層学習YOLO v3に関する本サイトのまとめ記事です。 Ubuntu18.04: Yolo V3 インストールメモUbuntu18.04にバージョンアップしたのでYolo V3のフレームワークdarknetをインストー […] ROS演習全12回 (C++) (2020-3-17) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講講義ロボットプログラミングⅡで使った演習をまとめたものです。使用言語はC++となっています。 ROS演習1-2019:亀で遊ぼう!この記事は私 […]
ROS演習全12回 (C++) (2020-3-17) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講講義ロボットプログラミングⅡで使った演習をまとめたものです。使用言語はC++となっています。 ROS演習1-2019:亀で遊ぼう!この記事は私 […] 深層学習:アノテーションツールCVATまとめ (2020-3-17) - OpenCVが開発している深層学習アノテーションツールCVAT(Computer Vision Annotation Tool)のまとめ記事です。CVATではカスタムDNNモデルによるオートアノテーション(Auto An […]
深層学習:アノテーションツールCVATまとめ (2020-3-17) - OpenCVが開発している深層学習アノテーションツールCVAT(Computer Vision Annotation Tool)のまとめ記事です。CVATではカスタムDNNモデルによるオートアノテーション(Auto An […] 深層学習: Detectron2まとめ (2020-3-17) - Facebook人工知能研究所が開発している最新の物体検出アルゴリズムを実装しているソフトウェアシステムDetectron2に関する本サイトのまとめ記事。 DNN:Detectron2 インストールFacebook人工知 […]
深層学習: Detectron2まとめ (2020-3-17) - Facebook人工知能研究所が開発している最新の物体検出アルゴリズムを実装しているソフトウェアシステムDetectron2に関する本サイトのまとめ記事。 DNN:Detectron2 インストールFacebook人工知 […] demura.netの表示速度改善 (2020-3-14) - いつも、demura.netにアクセスして頂きありがとうございます。本サイトの表示が遅く、イライラすることも多かったと思います。評価すべく、PageSpeed Insightsで計測したところパソコン35/100、モバイ […]
demura.netの表示速度改善 (2020-3-14) - いつも、demura.netにアクセスして頂きありがとうございます。本サイトの表示が遅く、イライラすることも多かったと思います。評価すべく、PageSpeed Insightsで計測したところパソコン35/100、モバイ […] IPv6に対応しました。 (2020-3-14) - Photo by Suzy Hazelwood from Pexels 本サイトは画像が多く重いので、サイトを訪れる方にご迷惑をおかけしていると思います。遅ればせながらIPv6に対応しましたので、これで少しでも速く表示さ […]
IPv6に対応しました。 (2020-3-14) - Photo by Suzy Hazelwood from Pexels 本サイトは画像が多く重いので、サイトを訪れる方にご迷惑をおかけしていると思います。遅ればせながらIPv6に対応しましたので、これで少しでも速く表示さ […] Deep Learning用PC作業メモ (Voyager18.04へ更新) (2020-3-13) - Deep Learning用デスクトップPCにVoyager18.04をクリーンインストールして、各種ソフトウェアをインストールしたときの作業メモ。 環境 CROYDON (BTO組立パソコン) CPU: Intel […]
Deep Learning用PC作業メモ (Voyager18.04へ更新) (2020-3-13) - Deep Learning用デスクトップPCにVoyager18.04をクリーンインストールして、各種ソフトウェアをインストールしたときの作業メモ。 環境 CROYDON (BTO組立パソコン) CPU: Intel […] Xubuntu16.04からVoyager18.04へ (2020-3-12) - ダウンロード ここからVoyager-18.04.2-amd64.isoをダウンロードする インストールUSBメディアの作成 ダウンロードしたイメージファイルを使いUSBインストールメディアを作成する。ここではLinux […]
Xubuntu16.04からVoyager18.04へ (2020-3-12) - ダウンロード ここからVoyager-18.04.2-amd64.isoをダウンロードする インストールUSBメディアの作成 ダウンロードしたイメージファイルを使いUSBインストールメディアを作成する。ここではLinux […] CVAT:カスタムモデルによる自動アノテーション (2020-3-10) - CVAT(Computer Vision Annotation Tool)ではカスタムDNNモデルによる自動アノテーション(オートアノテーション, Auto Annotation)ができる。この記事は以下の参考リンクをも […]
CVAT:カスタムモデルによる自動アノテーション (2020-3-10) - CVAT(Computer Vision Annotation Tool)ではカスタムDNNモデルによる自動アノテーション(オートアノテーション, Auto Annotation)ができる。この記事は以下の参考リンクをも […] CVAT: 起動とタスクの生成 (2020-3-10) - OpenCVが開発しているCVAT(Computer Vision Annotation Tool)のタスク生成のメモ。CVATはドキュメントが充実している。英語が読める方は参考リンクを参照。 参考リンク CVAT Us […]
CVAT: 起動とタスクの生成 (2020-3-10) - OpenCVが開発しているCVAT(Computer Vision Annotation Tool)のタスク生成のメモ。CVATはドキュメントが充実している。英語が読める方は参考リンクを参照。 参考リンク CVAT Us […] CVAT: 追加コンポーネントのインストール (2020-3-10) - OpenCVが開発しているCVAT(Computer Vision Annotation Tool)への追加コンポーネントのインストールメモ。コンポーネントを追加することで自動アノテーションが可能となる。以下のリンクにし […]
CVAT: 追加コンポーネントのインストール (2020-3-10) - OpenCVが開発しているCVAT(Computer Vision Annotation Tool)への追加コンポーネントのインストールメモ。コンポーネントを追加することで自動アノテーションが可能となる。以下のリンクにし […] CVAT: Computer Vision Annotation Toolインストールメモ (2020-3-9) - OpenCVが開発しているCVAT(Computer Vision Annotation Tool)のインストールメモ。Dockerを使うのでインストールはとても簡単。ライセンスはMIT Licenseなので使いやすい。 […]
CVAT: Computer Vision Annotation Toolインストールメモ (2020-3-9) - OpenCVが開発しているCVAT(Computer Vision Annotation Tool)のインストールメモ。Dockerを使うのでインストールはとても簡単。ライセンスはMIT Licenseなので使いやすい。 […] OpenVINO:モデルのダウンロード、中間表現への変換、そして推論 (2020-3-8) - OpenVINOはDNNの推論に特化したツールキット。学習済みのいろいろモデルをダウンロードしてから、OpenVINOで使える中間表現(IR)フォーマットに変換してから、推論までの作業メモ。以下のサイトに基づいている。 […]
OpenVINO:モデルのダウンロード、中間表現への変換、そして推論 (2020-3-8) - OpenVINOはDNNの推論に特化したツールキット。学習済みのいろいろモデルをダウンロードしてから、OpenVINOで使える中間表現(IR)フォーマットに変換してから、推論までの作業メモ。以下のサイトに基づいている。 […] OpenVINO:インストールメモ (2020-3-7) - OpenVINO(Open Visual Inference & Neural network Optimization)はIntelが開発しているDeep Learningの推論用ツールキット。CVATでオートアノテー […]
OpenVINO:インストールメモ (2020-3-7) - OpenVINO(Open Visual Inference & Neural network Optimization)はIntelが開発しているDeep Learningの推論用ツールキット。CVATでオートアノテー […] セマンティック・セグメンテーション用アノテーションツール (2020-3-5) - セマンティック・セグメンテーション(semantic segmentation)をする機会が増えて、アノテーションツール(annotation tool)を探している。今使っているのは次のツール。シンプルで良いのだが少し […]
セマンティック・セグメンテーション用アノテーションツール (2020-3-5) - セマンティック・セグメンテーション(semantic segmentation)をする機会が増えて、アノテーションツール(annotation tool)を探している。今使っているのは次のツール。シンプルで良いのだが少し […] DNN: Detectron2 Keypoint 検出モデル (2020-2-27) - Detectron2でキーポイント検出モデル(keypoint detection model)の推論を試したメモ。以下のDetectron2 Beginner’s Tutorialを和訳して説明を加えたもの。Tutor […]
DNN: Detectron2 Keypoint 検出モデル (2020-2-27) - Detectron2でキーポイント検出モデル(keypoint detection model)の推論を試したメモ。以下のDetectron2 Beginner’s Tutorialを和訳して説明を加えたもの。Tutor […] DNN: Detectron2 カスタムデータの学習2/2 (推論) (2020-2-27) - Detectron2でカスタムデータセット学習メモの続き。長くなったので学習と推論に分けた。以下のDetectron2 Beginner’s Tutorialをもとに説明を加えたもの。TutorialがGoo […]
DNN: Detectron2 カスタムデータの学習2/2 (推論) (2020-2-27) - Detectron2でカスタムデータセット学習メモの続き。長くなったので学習と推論に分けた。以下のDetectron2 Beginner’s Tutorialをもとに説明を加えたもの。TutorialがGoo […] DNN: Detectron2 カスタムデータの学習1/2 (学習) (2020-2-27) - Detectron2でカスタムデータセット学習のメモ。以下のDetectron2 Beginner’s Tutorialを和訳して説明を加えたもの。TutorialがGoogle Colabというクラウドサー […]
DNN: Detectron2 カスタムデータの学習1/2 (学習) (2020-2-27) - Detectron2でカスタムデータセット学習のメモ。以下のDetectron2 Beginner’s Tutorialを和訳して説明を加えたもの。TutorialがGoogle Colabというクラウドサー […] Twitter始めました! (2020-2-23) - 今までFaceBookも使っていましたが、テック系はTwitterが多いようなのでdemura.netもTwitterを2020年2月23日に始めました。よろしくお願いします。その名もdemura.net。同じなんかい。 […]
Twitter始めました! (2020-2-23) - 今までFaceBookも使っていましたが、テック系はTwitterが多いようなのでdemura.netもTwitterを2020年2月23日に始めました。よろしくお願いします。その名もdemura.net。同じなんかい。 […] DNN:Detectron2 インストール (2020-2-22) - Facebook人工知能が開発している最新の物体検出アルゴリズムを実装しているソフトウェアシステムDetectron2のインストールメモ。Detectron2をインストールする前にPyTorchをインストールする。PyT […]
DNN:Detectron2 インストール (2020-2-22) - Facebook人工知能が開発している最新の物体検出アルゴリズムを実装しているソフトウェアシステムDetectron2のインストールメモ。Detectron2をインストールする前にPyTorchをインストールする。PyT […] ROS Melodic:トピック通信しよう!(python) (2020-2-22) - この記事はTurtlebot2 (Kobuki)を使ったROS新人プログラム用の記事です。今回はROSの通信方式であるトピックを学びます。 1. Publisher キーボードからロボットを操縦するmy_teleopパッ […]
ROS Melodic:トピック通信しよう!(python) (2020-2-22) - この記事はTurtlebot2 (Kobuki)を使ったROS新人プログラム用の記事です。今回はROSの通信方式であるトピックを学びます。 1. Publisher キーボードからロボットを操縦するmy_teleopパッ […]