
ROS: mask_rcnn_rosのインストール (2019-9-1) - mask_rcnn_rosをインストールしたときのメモ。 環境 Ubunutu16.04 ROS Kinetic 次のサイトからgit cloneする Mask RCNN Object Detector $ cd ~/c […]
 RoboCup: Kobukiに緊急停止スイッチをつける (2019-9-1) - Kobukiに緊急停止スイッチをつけたときのメモ。本体を分解しないでつくばチャレンジではソフトウェアスイッチは禁止されているが、RoboCup@Homeでは禁止ではない。特に、RoboCup@Home Education […]
RoboCup: Kobukiに緊急停止スイッチをつける (2019-9-1) - Kobukiに緊急停止スイッチをつけたときのメモ。本体を分解しないでつくばチャレンジではソフトウェアスイッチは禁止されているが、RoboCup@Homeでは禁止ではない。特に、RoboCup@Home Education […]ロボット自身の音声を認識しない方法 (2019-8-12) - クラウドなどの音声認識サーバーが常に機能している場合、ロボット自身の発話も音声認識されてしまい人との会話がうまくいかない場合があります。それを回避するためには、自身が発話しているときにはロボットのマイクをOFFにし、話し […]
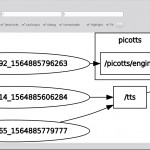 ROS: お薦めの!? 英語音声合成 (Test To Speech)パッケージ (2019-8-4) - ROSで使える英語の音声合成パッケージを探していたらオンライン、オフラインの色々なエンジンをサポートしているArnaud Rameyさんが開発した以下のパッケージを見つけた。本記事はインストールしたときのメモ。残念ながら […]
ROS: お薦めの!? 英語音声合成 (Test To Speech)パッケージ (2019-8-4) - ROSで使える英語の音声合成パッケージを探していたらオンライン、オフラインの色々なエンジンをサポートしているArnaud Rameyさんが開発した以下のパッケージを見つけた。本記事はインストールしたときのメモ。残念ながら […]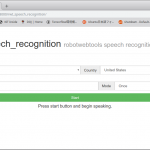 ROS Kinetic: Web Speech APIで音声認識 (2019-8-3) - Wep Speech APIを使うと音声認識が簡単にできる。しかも、ROSパッケージは以下のサイトで公開されており、開発者furushchevさんの詳しい日本語の解説記事もある。本記事はその作業メモ。 解説記事:ROSを […]
ROS Kinetic: Web Speech APIで音声認識 (2019-8-3) - Wep Speech APIを使うと音声認識が簡単にできる。しかも、ROSパッケージは以下のサイトで公開されており、開発者furushchevさんの詳しい日本語の解説記事もある。本記事はその作業メモ。 解説記事:ROSを […]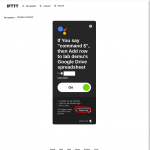 Google Home: IFTTTを使い音声認識結果をGoogle SpreadSheetに保存 (2019-7-19) - IFTTTを使いGoogle Homeの音声認識結果をGoogle SpreadSheetに保存したときのメモ IFTTTの設定 IFTTTサイトでアカウントの作成とログイン(説明は略)。gmailでアカウントを作ると作 […]
Google Home: IFTTTを使い音声認識結果をGoogle SpreadSheetに保存 (2019-7-19) - IFTTTを使いGoogle Homeの音声認識結果をGoogle SpreadSheetに保存したときのメモ IFTTTの設定 IFTTTサイトでアカウントの作成とログイン(説明は略)。gmailでアカウントを作ると作 […]Jetson Xavier: DNS_PROBE_FINISHED_BAD_CONFIG エラー (2019-7-18) - Jetson Xavier固有の問題ではないと思うが、DNS_PROBE_FINISHED_BAD_CONFIG エラーが出てどのウェブサイトにも接続できなくなった。解決方法のメモ。 $ sudo rm /etc/res […]
 Jetson Xavier: Turtlebot2をROS Melodicで動かす (2019-7-8) - Jetson XavierでTurtlebot2を動かそうと思ったところ、Xavierに対応しているOSはUbuntu18.04、ROSはMelodic。製造元のYujin RoboticsはMelodicに対応している […]
Jetson Xavier: Turtlebot2をROS Melodicで動かす (2019-7-8) - Jetson XavierでTurtlebot2を動かそうと思ったところ、Xavierに対応しているOSはUbuntu18.04、ROSはMelodic。製造元のYujin RoboticsはMelodicに対応している […]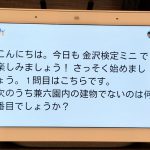 Google Nest Hubで金沢クイズアプリを作ってみた。 (2019-6-30) - Googleのディスプレイ付きAIスピーカーGoogle Nest Hubで金沢に関するクイズを作ってみました。本記事はそのメモ。制作には、Google Assistantを使って何か役に立つアプリを作るフレームワークA […]
Google Nest Hubで金沢クイズアプリを作ってみた。 (2019-6-30) - Googleのディスプレイ付きAIスピーカーGoogle Nest Hubで金沢に関するクイズを作ってみました。本記事はそのメモ。制作には、Google Assistantを使って何か役に立つアプリを作るフレームワークA […] 価格破壊のロボットアームxArm (2019-6-12) - RoboMech2019の企業展示ブースでxArm6が展示されていました。日本の正規代理店はTechShare株式会社になります。6自由度、5kg可搬、ハモニックドライブ、リンクはカーボン、コントローラ込みの重量は9.5 […]
価格破壊のロボットアームxArm (2019-6-12) - RoboMech2019の企業展示ブースでxArm6が展示されていました。日本の正規代理店はTechShare株式会社になります。6自由度、5kg可搬、ハモニックドライブ、リンクはカーボン、コントローラ込みの重量は9.5 […]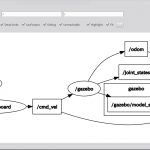 ROS演習6:デッドレコニングを実装しよう! (2019-5-28) - 今回はTurtlebot3にデッドレコニングを実装します。 デッドレコニング説明資料 以下の説明資料をダウンロードして読んでください。これをGazebo上のTurtlebot3に実装していきましょう。 deadRecko […]
ROS演習6:デッドレコニングを実装しよう! (2019-5-28) - 今回はTurtlebot3にデッドレコニングを実装します。 デッドレコニング説明資料 以下の説明資料をダウンロードして読んでください。これをGazebo上のTurtlebot3に実装していきましょう。 deadRecko […] ROS演習5:サービスを使って双方向通信しよう! (2019-5-28) - 今回はROSの通信のもう一つの通信方式であるサービスを理解しましょう。次のROS Wikiを参考にしています。 C++でシンプルなサービスとクライアントを書く シンプルなサービスとクライアントを実行してみる サービスはR […]
ROS演習5:サービスを使って双方向通信しよう! (2019-5-28) - 今回はROSの通信のもう一つの通信方式であるサービスを理解しましょう。次のROS Wikiを参考にしています。 C++でシンプルなサービスとクライアントを書く シンプルなサービスとクライアントを実行してみる サービスはR […] ROS演習4-2019:トピックで通信しよう! (2019-5-28) - 今回はROSの通信方式であるトピックを学びます。 1. Publisher キーボードからロボットを操縦するmy_teleopパッケージを作ろう! ROS演習2と同じ要領でmy_teleopパッケージを作ります。忘れた人 […]
ROS演習4-2019:トピックで通信しよう! (2019-5-28) - 今回はROSの通信方式であるトピックを学びます。 1. Publisher キーボードからロボットを操縦するmy_teleopパッケージを作ろう! ROS演習2と同じ要領でmy_teleopパッケージを作ります。忘れた人 […]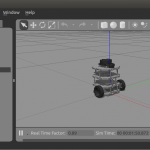 ROS演習3:シミュレータを動かそう! (2019-5-28) - 今回はシミュレータGAZEBOを使い、Turtlebot3を動かします。次のTurtleBot3 Official Wikiを参考にしています。 TurtleBot3 Official Wiki 0. VirtualBo […]
ROS演習3:シミュレータを動かそう! (2019-5-28) - 今回はシミュレータGAZEBOを使い、Turtlebot3を動かします。次のTurtleBot3 Official Wikiを参考にしています。 TurtleBot3 Official Wiki 0. VirtualBo […] ROS演習2:はじめてのROSプログラミング (2019-5-28) - はじめてのROSプログラミングなので、Hellow Worldと表示するプログラムを作り、ビルドして実行してみましょう。この記事は以下のROS Wikiの記事を参考にしています。 ROSパッケージを作る ROSのパッケー […]
ROS演習2:はじめてのROSプログラミング (2019-5-28) - はじめてのROSプログラミングなので、Hellow Worldと表示するプログラムを作り、ビルドして実行してみましょう。この記事は以下のROS Wikiの記事を参考にしています。 ROSパッケージを作る ROSのパッケー […] ROS演習1:タートルを動かそう! (2019-5-28) - ROSのインストールは終わったものとします。ROSのインストールが終わっていない場合は以下のリンクを参考にインストールしてください ROS Kinticインストール 今回は動作確認を兼ねてタートル(亀)で遊んでみましょう […]
ROS演習1:タートルを動かそう! (2019-5-28) - ROSのインストールは終わったものとします。ROSのインストールが終わっていない場合は以下のリンクを参考にインストールしてください ROS Kinticインストール 今回は動作確認を兼ねてタートル(亀)で遊んでみましょう […] 認知症高齢者用かわいいロボット達 (2019-5-23) - 認知症高齢者用かわいいロボットのサーベイ。主に購入可能か発売予定のものを列挙していきます(作成中)。 セラピー用アザラシ型ロボット「パロ」(2005国内販売) T. Shibata: “An Overview […]
認知症高齢者用かわいいロボット達 (2019-5-23) - 認知症高齢者用かわいいロボットのサーベイ。主に購入可能か発売予定のものを列挙していきます(作成中)。 セラピー用アザラシ型ロボット「パロ」(2005国内販売) T. Shibata: “An Overview […] 出村研究室ロボット紹介:かわいいペンギンロボット (2019-5-17) - 2015年に堀君が開発したペンギンロボット。幼児や高齢者からかわいがられることを目的としたデザインのロボットです。3D CADで設計、3Dプリンタでパーツを作成し、首と手をArduinoで制御して、かわいい動作の実現を目 […]
出村研究室ロボット紹介:かわいいペンギンロボット (2019-5-17) - 2015年に堀君が開発したペンギンロボット。幼児や高齢者からかわいがられることを目的としたデザインのロボットです。3D CADで設計、3Dプリンタでパーツを作成し、首と手をArduinoで制御して、かわいい動作の実現を目 […] OpenKiosk: PCを無人情報端末化 (2019-4-23) - キオスク端末とは公共の場などに置かれた無人の情報端末のことで、OpenKioskはWindows、Linux、OSXなどでキオスク端末を実現するオープンソースのソフトウェアです。授業ではオンラインテストに使います。 イン […]
OpenKiosk: PCを無人情報端末化 (2019-4-23) - キオスク端末とは公共の場などに置かれた無人の情報端末のことで、OpenKioskはWindows、Linux、OSXなどでキオスク端末を実現するオープンソースのソフトウェアです。授業ではオンラインテストに使います。 イン […] KIT春のオープンキャンパス2019 (2019-4-22) - KIT春のオープンキャンパスが4月21日(日)に開催されました。例年より多くの方にご来場頂きありがとうございました。また、担当の山川君、小野君お疲れ様でした。次回は夏のオープンキャンパス。7月13日(土)、14日(日)に […]
KIT春のオープンキャンパス2019 (2019-4-22) - KIT春のオープンキャンパスが4月21日(日)に開催されました。例年より多くの方にご来場頂きありがとうございました。また、担当の山川君、小野君お疲れ様でした。次回は夏のオープンキャンパス。7月13日(土)、14日(日)に […] OnlineJudge (2019-4-18) - プログラミングの授業でOnline Judgeサーバーを立てて運用しているのでメモ。Online Judgeは中国青島大学のOnlineJudge2.0を使用。1年ぶりに使ったらあまり覚えていなかったのでメモは重要。 準 […]
OnlineJudge (2019-4-18) - プログラミングの授業でOnline Judgeサーバーを立てて運用しているのでメモ。Online Judgeは中国青島大学のOnlineJudge2.0を使用。1年ぶりに使ったらあまり覚えていなかったのでメモは重要。 準 […] コンピュータ工学Ⅰ:gtypistのインストール (2019-4-9) - 次のタッチタイプソフトをインストールする。 gtypist(学内のみインストール可) 文字化けするときは、ウインドウのタイトルを右マウスボタンでクリックしてプロパティを表示し、「レガシーコンソールを使用する」にチェックを […]
コンピュータ工学Ⅰ:gtypistのインストール (2019-4-9) - 次のタッチタイプソフトをインストールする。 gtypist(学内のみインストール可) 文字化けするときは、ウインドウのタイトルを右マウスボタンでクリックしてプロパティを表示し、「レガシーコンソールを使用する」にチェックを […] コンピュータ工学Ⅰ:C/C++統合開発環境Code::Blocks17.12のインストール (Windows) (2019-4-9) - CodeBlocks(コードブロックス)というフリーでオープンソースなC/C++統合開発環境のインストール法を説明します.日本では,Codeblocksはあまり馴染みがないかもしれませんが,オープンソースであり、Wind […]
コンピュータ工学Ⅰ:C/C++統合開発環境Code::Blocks17.12のインストール (Windows) (2019-4-9) - CodeBlocks(コードブロックス)というフリーでオープンソースなC/C++統合開発環境のインストール法を説明します.日本では,Codeblocksはあまり馴染みがないかもしれませんが,オープンソースであり、Wind […] Razer Blade 15用スリムケース (2019-4-8) - Razer Blade 15を半年ぐらい使ってきたが、デザインと性能を兼ね備えとても満足している。持ち運び用にスリムなケースが必要だが、Razer Blade 15用の純正スリムケースがないので色々と探していた。MacB […]
Razer Blade 15用スリムケース (2019-4-8) - Razer Blade 15を半年ぐらい使ってきたが、デザインと性能を兼ね備えとても満足している。持ち運び用にスリムなケースが必要だが、Razer Blade 15用の純正スリムケースがないので色々と探していた。MacB […] 英文法チェックツール (2019-4-2) - 英文法チェックツール( grammar checker)に関する参考になる記事。 What's The Best Grammar Checker Software This Year?The best grammar c […]
英文法チェックツール (2019-4-2) - 英文法チェックツール( grammar checker)に関する参考になる記事。 What's The Best Grammar Checker Software This Year?The best grammar c […] Jetson Nano: ロボカップジュニアに最適!? (2019-3-31) - NVIDIAからJetson Nanoが発売された。最近のロボットは認識系でほとんどDeep Learningを使う。ロボカップジュニアではRaspberry Pi良く若われているがDeep Learningを使うには厳 […]
Jetson Nano: ロボカップジュニアに最適!? (2019-3-31) - NVIDIAからJetson Nanoが発売された。最近のロボットは認識系でほとんどDeep Learningを使う。ロボカップジュニアではRaspberry Pi良く若われているがDeep Learningを使うには厳 […]常時SSL (常時HTTPS化) しました。 (2019-3-28) - 遅ればせながら、セキュリティを高めるためにdemura.netを常時SSL (常時HTTPS化) しましたのでhttps://demura.netでアクセスできます。
 pybulletインストールメモ (2019-3-19) - pybulletをインストールしたときのメモ bullet3のインストール $ mkdir src $ cd src $ git clone https://github.com/bulletphysics/bullet […]
pybulletインストールメモ (2019-3-19) - pybulletをインストールしたときのメモ bullet3のインストール $ mkdir src $ cd src $ git clone https://github.com/bulletphysics/bullet […]ソフトウェアRAID1設定 (2019-3-18) - Seagateの8TBハードディスクを2台購入したので、RAIDを組むことにした。デスクトップに使用しているマザーボードにはfake RAID機能はあるが、柔軟に運用したいのでソフトウェアRAIDを使う。RAIDのレベル […]
Seagate ST8000DM004 不良セクターチェック (2019-3-18) - RAIDを組むためにSeagateの8TBのハードディスクST8000DM004を2台購入した。念のためにハードディスクに不良ブロックがないか調べた。そのときのメモ。以下のウェブサイトを参考にした。 New 8TB WD […]
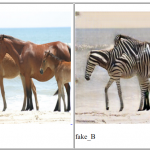 CycleGANのインストール (2019-3-1) - Zhu、Parkらによって2017年に提案されたCycleGANをインストールしたときのメモ。上の写真は、左が元画像で、右がCycleGANによって生成された画像。CycleGANはPix2Pixとは違いペアとなる学習デ […]
CycleGANのインストール (2019-3-1) - Zhu、Parkらによって2017年に提案されたCycleGANをインストールしたときのメモ。上の写真は、左が元画像で、右がCycleGANによって生成された画像。CycleGANはPix2Pixとは違いペアとなる学習デ […]PyTorchインストールメモ (2019-3-1) - CycleGANを試そうとしたらPyTorchという深層学習フレームワークが必要なのでPyTorch1.0をインストールしたときのメモ。 公式ウェブサイト PyTorch 環境 Ubuntu16.04 Python3.5 […]
 Ubuntu:使い方簡単!動画キャプチャソフトSimpleScreenRecorder (2019-2-7) - 卒研発表、修士研究発表で動画をキャプチャする必要が多いと思います。 Ubuntuで動画を簡単にキャプチャできるソフトを紹介します。その名はSimpleScreenRecorder。 GUIがわかりやすく、設定の変更を変 […]
Ubuntu:使い方簡単!動画キャプチャソフトSimpleScreenRecorder (2019-2-7) - 卒研発表、修士研究発表で動画をキャプチャする必要が多いと思います。 Ubuntuで動画を簡単にキャプチャできるソフトを紹介します。その名はSimpleScreenRecorder。 GUIがわかりやすく、設定の変更を変 […]YOLO V3: Darknetのデータ拡張 (2019-2-5) - YOLO開発のディープラーニングフレームワークdarknetはデータ拡張(Data Augmentation)がデフォルトで機能する。これを知らないで、データ拡張を議論していたのでメモしておく。 yolov3.cfgファ […]
英語論文執筆に有用なサイト:Academic Phrasebank (2019-1-30) - 金沢大学で修士や博士課程学生のアカデミックライティングを指導されている英語の先生に教えてもらった、英語論文を執筆する際に有益なサイトです。
デュアルブートのリペア (2019-1-30) - Ubuntu16.04とWindows10をデュアルブートで使っていたが、Windows10を再インストールしたらUbuntuが起動しなくなったので、それをリペアしたときのメモ。 sudo add-apt-reposit […]
 ROS演習11-2018:ロボットアームと位置センサ (2019-1-11) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。 位置センサ用プラ […]
ROS演習11-2018:ロボットアームと位置センサ (2019-1-11) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。 位置センサ用プラ […] PD実践 ライントレース競技ライブ配信 1/10 13:45~16:00 (2019-1-10) - ロボティクス学科2年次プロジェクトデザイン教育科目のPD実践ではETロボコンをテーマにしています。1月10日13:45からライントレース競技の様子を以下のリンクでライブ配信します。ETロボコンで実際に使用したフィールドを […]
PD実践 ライントレース競技ライブ配信 1/10 13:45~16:00 (2019-1-10) - ロボティクス学科2年次プロジェクトデザイン教育科目のPD実践ではETロボコンをテーマにしています。1月10日13:45からライントレース競技の様子を以下のリンクでライブ配信します。ETロボコンで実際に使用したフィールドを […]500万Visits達成! (2019-1-9) - 2019年1月9日、500万Visits(訪問回数)を達成。約20年かかりました。昨年ぐらいからアクセスが増えて、最近は1日約2000Visits。約4PV(Page View)/Visitsなので月間約25万PV。これ […]
 Jetson Xavier: Tensorコア対応Yolo V3 インストールメモ (2018-12-21) - XavierにYolo V3をインストールしたときのメモ。Xavierは16bit浮動小数点が使え数倍高速になるので、それに対応したTensorコアを使うdarknetをインストールする。以下のウェブサイト […]
Jetson Xavier: Tensorコア対応Yolo V3 インストールメモ (2018-12-21) - XavierにYolo V3をインストールしたときのメモ。Xavierは16bit浮動小数点が使え数倍高速になるので、それに対応したTensorコアを使うdarknetをインストールする。以下のウェブサイト […] Jetson Xavier: JetPack4.1.1のインストール (2018-12-21) - Jetson AGX XavierへJetPack4.1.1をインストールしたときのメモ。当初、2018年の夏に購入したRazer Blade 15をXavierのホストPC環境としてインストールしようと何度も試みたがど […]
Jetson Xavier: JetPack4.1.1のインストール (2018-12-21) - Jetson AGX XavierへJetPack4.1.1をインストールしたときのメモ。当初、2018年の夏に購入したRazer Blade 15をXavierのホストPC環境としてインストールしようと何度も試みたがど […]Jetson Xavier: Jetpack4.1.1インストール後の作業 (2018-12-20) - Jetson xavierにJetPack4.1.1をインストールした後の作業メモ ユーザの作成 System Settings -> User Accounts でMy Accountsを作る。この例ではアカウン […]
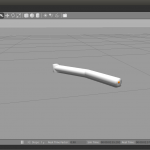
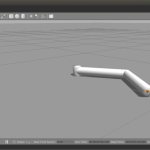 ROS演習10-2018:ロボットアーム (2018-12-19) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照して […]
ROS演習10-2018:ロボットアーム (2018-12-19) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照して […] ROS演習9-2018: ロボットビジョン (OpenCVとの連携) (2018-12-10) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回はcv_bridgeを使います。ROSでOpenCVを使いgazeboシミュレータのRGB-Dセンサから取得した画像から赤色 […]
ROS演習9-2018: ロボットビジョン (OpenCVとの連携) (2018-12-10) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回はcv_bridgeを使います。ROSでOpenCVを使いgazeboシミュレータのRGB-Dセンサから取得した画像から赤色 […]ロボットプログラミングⅡ-2018:VirtualBoxでの演習まとめ (2018-12-5) - この記事は私がKITロボティクス学科で担当している2018年後学期開講の講義ロボットプログラミングⅡ用です。VirtualBoxとUbuntuのインストールからROS演習8までの記事をまとめました。 ロボットプログラミン […]
ロボットプログラミングⅡ-2018:Ubuntu16.04のネットワーク設定 (2018-12-5) - この記事は私が担当している講義ロボットプログラミングⅡ用です。 VirtualBox5.2にインストールしたUbuntu16.04でのネットワーク設定を説明します。 ○ ネットワーク設定 (1) 画面左下の「システム設定 […]
ロボットプログラミングⅡ-2018:Virtualbox5.2の設定 (2018-12-5) - この記事は私が金沢工業大学ロボティクス学科で担当している2018年後学期開講の講義ロボットプログラミングⅡ用です。 この記事では、快適に使うためにVirtualBox5.2の設定を行います。 ○ VirtualBoxの設 […]
ロボットプログラミングⅡ-2018:Virtualbox5.2+Ubuntu16.04のインストール法 (2018-12-5) - この記事は私が金沢工業大学ロボティクス学科で担当している2018年後学期開講の講義ロボットプログラミングⅡ用です。WSL(Windows Subsystem for Linux)環境でROSを使おうとしましたが、Gaze […]
ROS演習8-2018:ナビゲーションとアクションプログラム (2018-12-5) - この記事は私が金沢工業大学ロボティクス学科で担当している2018年後学期開講の講義ロボットプログラミングⅡ用です。ROS演習で7はrvizを使いGUIでロボットを動かしましたが、今回はROSのActionLibを使ったア […]
 ROS演習7-2018:地図作成・自己位置推定(SLAM, AMCL) (2018-11-29) - この記事は私が金沢工業大学ロボティクス学科で担当している2018年度後学期開講の講義ロボットプログラミングⅡ用です。今回は地図作成(SLAM)と自己位置推定(AMCL)のパッケージを使いロボットにナビゲーションをさせまし […]
ROS演習7-2018:地図作成・自己位置推定(SLAM, AMCL) (2018-11-29) - この記事は私が金沢工業大学ロボティクス学科で担当している2018年度後学期開講の講義ロボットプログラミングⅡ用です。今回は地図作成(SLAM)と自己位置推定(AMCL)のパッケージを使いロボットにナビゲーションをさせまし […]