
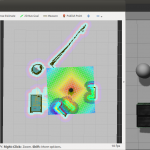
 Ubuntu18.04: ウェイポイントナビゲーション(ActionLib:Python) (2020-2-5) - この記事はROS新人教育プログラム用です。今回はActionLibを使いウェイポイントナビゲーションのプログラムを作りましょう。 まずは、以下のROSチュートリアルを読みましょう。 ActionLib Tutorial […]
Ubuntu18.04: ウェイポイントナビゲーション(ActionLib:Python) (2020-2-5) - この記事はROS新人教育プログラム用です。今回はActionLibを使いウェイポイントナビゲーションのプログラムを作りましょう。 まずは、以下のROSチュートリアルを読みましょう。 ActionLib Tutorial […] Ubuntu18.04:はじめてのROS プログラミング(python) (2020-2-4) - この記事はROS新人教育用です。ROSでHellow Worldと表示するプログラムを作り、ビルドして実行してみましょう。この記事は以下のROS Wikiの記事を参考に、ビルドコマンドとして新しいcatkin build […]
Ubuntu18.04:はじめてのROS プログラミング(python) (2020-2-4) - この記事はROS新人教育用です。ROSでHellow Worldと表示するプログラムを作り、ビルドして実行してみましょう。この記事は以下のROS Wikiの記事を参考に、ビルドコマンドとして新しいcatkin build […] Ubuntu18.04: ROS MelodicでLidarの設定 (2020-1-31) - KobukiベースのHappy RobotにはHokuyo Lidarを搭載しています。この回ではROS MelodicでのHokuyo Lidarの設定を学びます。HokuyoのLidarを搭載しない場合は次の回へ進ん […]
Ubuntu18.04: ROS MelodicでLidarの設定 (2020-1-31) - KobukiベースのHappy RobotにはHokuyo Lidarを搭載しています。この回ではROS MelodicでのHokuyo Lidarの設定を学びます。HokuyoのLidarを搭載しない場合は次の回へ進ん […]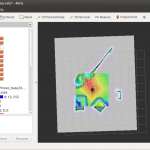 Ubuntu18.04: Kobukiでナビゲーション (2020-1-30) - この回では、ROSのナビゲーションパッケージと前回作成した地図を使いKobukiを自動でナビゲーションします。ここではプログラムを一行も書かずに、パッケージとRviz上でのマウス操作でナビゲーションを実行しますが、後の回 […]
Ubuntu18.04: Kobukiでナビゲーション (2020-1-30) - この回では、ROSのナビゲーションパッケージと前回作成した地図を使いKobukiを自動でナビゲーションします。ここではプログラムを一行も書かずに、パッケージとRviz上でのマウス操作でナビゲーションを実行しますが、後の回 […] Ubuntu18.04: Kobukiで地図生成 (2020-1-30) - この回ではKobukiでROSの地図生成パッケージgmappingを使い地図を生成しましょう。次回は、ここで作った地図を使いKobukiをナビゲーションのために保存します。 端末を6個開き、各端末で以下のコマンドを実行す […]
Ubuntu18.04: Kobukiで地図生成 (2020-1-30) - この回ではKobukiでROSの地図生成パッケージgmappingを使い地図を生成しましょう。次回は、ここで作った地図を使いKobukiをナビゲーションのために保存します。 端末を6個開き、各端末で以下のコマンドを実行す […] Ubuntu18.04: KobukiをROS Melodicで動かす (2020-1-30) - Kobuki(Turtlebot2)はRoboCup@Home Educationリーグでデファクトスタンダードの存在ですが、最近は開発元のYujin Roboticsからはあまりサポートされていないようです。いろいろ調 […]
Ubuntu18.04: KobukiをROS Melodicで動かす (2020-1-30) - Kobuki(Turtlebot2)はRoboCup@Home Educationリーグでデファクトスタンダードの存在ですが、最近は開発元のYujin Roboticsからはあまりサポートされていないようです。いろいろ調 […]Ubuntu18.04: ROS Melodicを入れるとPython3でOpenCVがエラーになる問題 (2020-1-28) - 私の環境では問題がないのですが、Ubuntu18.04でOpenCVをインストールしてからROS Melodicを入れると以下のエラーになるようです。 happyrobot@razer:~/Documents$ pyth […]
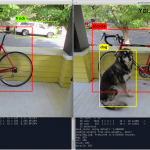 Ubuntu18.04: Yolo V3 インストールメモ (2020-1-22) - Ubuntu18.04にバージョンアップしたのでYolo V3のフレームワークdarknetをインストールしたときのメモ。 上の例では、処理時間がV2が18.9[ms]、V3が22.7[ms]と多少遅くなっているが、予測 […]
Ubuntu18.04: Yolo V3 インストールメモ (2020-1-22) - Ubuntu18.04にバージョンアップしたのでYolo V3のフレームワークdarknetをインストールしたときのメモ。 上の例では、処理時間がV2が18.9[ms]、V3が22.7[ms]と多少遅くなっているが、予測 […] 深層学習ハッカソン (2020-1-22) - 専門ゼミ(プレゼミ)で実施する深層学習ハッカソンの実施要領。 ハンズオン チーム分け 3チーム。各チーム3~4名。 リーダは深層学習の経験、デュアルブートのPCを持っているかで決める。それ以外のメンバーは1組と2組が混成 […]
深層学習ハッカソン (2020-1-22) - 専門ゼミ(プレゼミ)で実施する深層学習ハッカソンの実施要領。 ハンズオン チーム分け 3チーム。各チーム3~4名。 リーダは深層学習の経験、デュアルブートのPCを持っているかで決める。それ以外のメンバーは1組と2組が混成 […] ROS演習12-2019:ロボットアーム2 (2020-1-9) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。 位置センサ用プラ […]
ROS演習12-2019:ロボットアーム2 (2020-1-9) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今回は先回作った2自由度のロボットアームの先端に位置センサを取り付け、先端位置を取得するプログラムを作ります。 位置センサ用プラ […]Ubuntu18.04: Proxy環境下でaptできないときの設定 (2020-1-9) - 大学等のProxy環境下でaptできないときの設定。 .bashrcの最後に好きなエディタを使い以下の3行を追加する。 export ftp_proxy="ftp://プロキシサーバー名:ポート番号/" export h […]
 3Dデプスカメラ SCS Occipital (2020-1-8) - 国際ロボット展2019の株式会社アルゴのブースでSCSという3Dデプスカメラに興味を持った。RealSense と同程度のサイズながら点群が綺麗、0.3mから10mまで見え、消費電力も最大3Wと小さい。もちろん、ROSに […]
3Dデプスカメラ SCS Occipital (2020-1-8) - 国際ロボット展2019の株式会社アルゴのブースでSCSという3Dデプスカメラに興味を持った。RealSense と同程度のサイズながら点群が綺麗、0.3mから10mまで見え、消費電力も最大3Wと小さい。もちろん、ROSに […]CUDA 10.2のインストール (2020-1-4) - CUDA10.2をインストールしたときのメモ。 環境 CROYDON (BTO組立パソコン) CPU: Intel i7-8700K GPU: Nvidia 1080Ti × 2 Memory:32GB Motherb […]
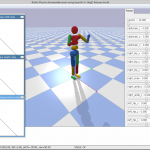 Ubuntu18.04: PyBulletインストールメモ (2020-1-3) - PyBulletをUbuntu18.04にインストールしたときのメモ。物理エンジンBullet Physics SDKをダウロードしてソースからビルドする。PyBulletはBulletのpythonモジュールでソースに […]
Ubuntu18.04: PyBulletインストールメモ (2020-1-3) - PyBulletをUbuntu18.04にインストールしたときのメモ。物理エンジンBullet Physics SDKをダウロードしてソースからビルドする。PyBulletはBulletのpythonモジュールでソースに […] Ubuntu18.04: darknetをROSで使う (darknet_ros) (2020-1-3) - YOLO V3をROSで使うためのパッケージdarknet_rosのインストール、設定法と使い方のメモ。 本家サイト YOLO V3 for ROS: Real-Time Object Detection for ROS […]
Ubuntu18.04: darknetをROSで使う (darknet_ros) (2020-1-3) - YOLO V3をROSで使うためのパッケージdarknet_rosのインストール、設定法と使い方のメモ。 本家サイト YOLO V3 for ROS: Real-Time Object Detection for ROS […] Ubuntu18.04: RealSense D435iをROS Melodicで使う (2020-1-2) - RealSense D435iをROS Melodicで使うメモ。D435iはD435にIMUが搭載された新しい機種。D435と同じようにインストールできた。ROSのラッパーもありすぐ使える。このメモはカラー画像の表示ま […] ROS: catkin buildコマンド (2020-1-2) - この記事は以下のROS Wikiの記事を参考に、ビルドコマンドとして新しいcatkin buildを使います。従来のcatkin_makeコマンドと比較して、パッケージ毎に違う環境(isolated environmen […]
Ubuntu18.04: RealSense D435iをROS Melodicで使う (2020-1-2) - RealSense D435iをROS Melodicで使うメモ。D435iはD435にIMUが搭載された新しい機種。D435と同じようにインストールできた。ROSのラッパーもありすぐ使える。このメモはカラー画像の表示ま […] ROS: catkin buildコマンド (2020-1-2) - この記事は以下のROS Wikiの記事を参考に、ビルドコマンドとして新しいcatkin buildを使います。従来のcatkin_makeコマンドと比較して、パッケージ毎に違う環境(isolated environmen […] Ubuntu18.04: OpenCV3.4.9 (CUDA10.2)のインストール (2020-1-1) - Ubuntu18.04にOpenCV3.4.9をGPU搭載のラップトップ用にソースからビルドしインストールしたときのメモ。GPUを使いたいのでソースからビルドした。インストール方法は以下のリンクの手順を参考にした。 In […]
Ubuntu18.04: OpenCV3.4.9 (CUDA10.2)のインストール (2020-1-1) - Ubuntu18.04にOpenCV3.4.9をGPU搭載のラップトップ用にソースからビルドしインストールしたときのメモ。GPUを使いたいのでソースからビルドした。インストール方法は以下のリンクの手順を参考にした。 In […] Razer Blade 15 環境設定メモ (Xubuntu18.04.2, Cuda10.2) (2019-12-31) - Razer Blade 15 (2018)にxubuntu18.04.2, Cuda10.2をインストールしたときのメモ。発売から約1年半経つが未だに色褪せないカッコ良さ。ただ、少々重い。 環境 Razer Blade […]
Razer Blade 15 環境設定メモ (Xubuntu18.04.2, Cuda10.2) (2019-12-31) - Razer Blade 15 (2018)にxubuntu18.04.2, Cuda10.2をインストールしたときのメモ。発売から約1年半経つが未だに色褪せないカッコ良さ。ただ、少々重い。 環境 Razer Blade […] Voyager 18.04:インストールと設定 (2019-12-30) - フランス製のLinuxディストリビューションVoyager16.04LTSはXubuntuベースでデザインが洗練されているので使っている。サポートが2020年4月までなのでVoyager 18.04にアップデートした。 […]
Voyager 18.04:インストールと設定 (2019-12-30) - フランス製のLinuxディストリビューションVoyager16.04LTSはXubuntuベースでデザインが洗練されているので使っている。サポートが2020年4月までなのでVoyager 18.04にアップデートした。 […] ROS: Roomba 800 の掃除機能を使いたい (2019-12-19) - Roomba 800 の掃除機能をROSで使いたいときのメモ。Roomba用のパッケージとしては以下のcreate_autonomyを使っている。 ROS driver for iRobot Create 1 and 2 […]
ROS: Roomba 800 の掃除機能を使いたい (2019-12-19) - Roomba 800 の掃除機能をROSで使いたいときのメモ。Roomba用のパッケージとしては以下のcreate_autonomyを使っている。 ROS driver for iRobot Create 1 and 2 […] RealSense D435が落ちる問題 (2019-12-19) - RealSense D435をUbuntu16.04で使用しているが研究室ではごくまれに落ちる程度であったが、競技会場にきて頻繁に落ちてしまいロボットが全然動かないまずい状態になった。ネットで検索したところ、以下の記事が […]
RealSense D435が落ちる問題 (2019-12-19) - RealSense D435をUbuntu16.04で使用しているが研究室ではごくまれに落ちる程度であったが、競技会場にきて頻繁に落ちてしまいロボットが全然動かないまずい状態になった。ネットで検索したところ、以下の記事が […] FUTURE CONVENIENCE STORE CONTEST (2019-12-18) - 東京ビッグサイトで開催されるWorld Robot Summit 2019のFuture Convenience Store Contestにロボティクス学科出村研究室Happy Robotチームが出場しています。競技は […] ROS: Turtlebot2をKineticで動かす (2019-12-12) - Turtlebot2をROS Kineticで動かした時のメモ。Turtlebot2はRoboCup@Home Educationリーグでデファクトスタンダードの存在ですが、最近は開発元のYujin Roboticsから […]
FUTURE CONVENIENCE STORE CONTEST (2019-12-18) - 東京ビッグサイトで開催されるWorld Robot Summit 2019のFuture Convenience Store Contestにロボティクス学科出村研究室Happy Robotチームが出場しています。競技は […] ROS: Turtlebot2をKineticで動かす (2019-12-12) - Turtlebot2をROS Kineticで動かした時のメモ。Turtlebot2はRoboCup@Home Educationリーグでデファクトスタンダードの存在ですが、最近は開発元のYujin Roboticsから […] ROS演習11-2019:ロボットアーム (2019-12-11) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照して […]
ROS演習11-2019:ロボットアーム (2019-12-11) - この記事は私が金沢工業大学ロボティクス学科で担当している講義ロボットプログラミングⅡ用です。今週はgazeboを使い2自由度のロボットアームを作り、関節を動かします。2自由度ロボットアームのURDFは参考リンクを参照して […] ROS演習10-2019: ロボットビジョン (OpenCVとの連携) (2019-12-10) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期講義ロボットプログラミングⅡ用です。今回はcv_bridgeを使います。ROSでOpenCVを使いgazeboシミュレータのRGB-Dセンサから取 […]
ROS演習10-2019: ロボットビジョン (OpenCVとの連携) (2019-12-10) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期講義ロボットプログラミングⅡ用です。今回はcv_bridgeを使います。ROSでOpenCVを使いgazeboシミュレータのRGB-Dセンサから取 […] ROS演習9-2019:ナビゲーションとアクションプログラム (2019-12-4) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年後学期開講の講義ロボットプログラミングⅡ用です。ROS演習8ではrvizを使いGUIでロボットを動かしましたが、今回はROSのActionLibを使ったア […]
ROS演習9-2019:ナビゲーションとアクションプログラム (2019-12-4) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年後学期開講の講義ロボットプログラミングⅡ用です。ROS演習8ではrvizを使いGUIでロボットを動かしましたが、今回はROSのActionLibを使ったア […] ROS演習8-2019:地図作成・自己位置推定 (gmapping, amcl) (2019-11-27) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です。今回は地図作成にgmappingパッケージと自己位置推定にamclパッケージを使いロボットにナビゲーショ […]
ROS演習8-2019:地図作成・自己位置推定 (gmapping, amcl) (2019-11-27) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です。今回は地図作成にgmappingパッケージと自己位置推定にamclパッケージを使いロボットにナビゲーショ […] ROS演習7-2019:デッドレコニングを実装しよう! (2019-11-26) - 今回はTurtlebot3にデッドレコニングを実装します。 デッドレコニング説明資料 以下の説明資料をダウンロードして読んでください。これをGazebo上のTurtlebot3に実装していきましょう。 deadRecko […]
ROS演習7-2019:デッドレコニングを実装しよう! (2019-11-26) - 今回はTurtlebot3にデッドレコニングを実装します。 デッドレコニング説明資料 以下の説明資料をダウンロードして読んでください。これをGazebo上のTurtlebot3に実装していきましょう。 deadRecko […] ROS演習6-2019:Turtlebot3をプログラムで動かそう (2019-11-26) - ROS演習4の知識を使いTurtlebot3をプログラムで動かします。この演習6は演習7を問題を解くためのヒントとなっています。 まず、Robotクラスを作成し、次のメンバ関数を作成します。 指定速度[m/s]で指定時間 […]
ROS演習6-2019:Turtlebot3をプログラムで動かそう (2019-11-26) - ROS演習4の知識を使いTurtlebot3をプログラムで動かします。この演習6は演習7を問題を解くためのヒントとなっています。 まず、Robotクラスを作成し、次のメンバ関数を作成します。 指定速度[m/s]で指定時間 […] VirtualBoxからUbuntuが起動しないときの対処方法 (2019-11-19) - VirtualBoxからUbuntuが起動しないときの対処方法 VirtualBoxを起動し、Ubuntuを立ち上げようとすると次のようなエーラが出た場合、詳細をクリックする。 以下のエラーの場合は、windowsの仮想 […] ROS演習2-2019:はじめてのROSプログラミング(catkin build) (2019-11-6) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です。ROSでHellow Worldと表示するプログラムを作り、ビルドして実行してみましょう。この記事は以下 […]
VirtualBoxからUbuntuが起動しないときの対処方法 (2019-11-19) - VirtualBoxからUbuntuが起動しないときの対処方法 VirtualBoxを起動し、Ubuntuを立ち上げようとすると次のようなエーラが出た場合、詳細をクリックする。 以下のエラーの場合は、windowsの仮想 […] ROS演習2-2019:はじめてのROSプログラミング(catkin build) (2019-11-6) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です。ROSでHellow Worldと表示するプログラムを作り、ビルドして実行してみましょう。この記事は以下 […]Hyper-Vの有効化、無効化 (2019-10-25) - VirtualBox6.0からWSL2と共存できるような記事がありましたが、私の環境ではできませんでした。 そのため、VirtualBoxを使うときには管理者権限でコマンドプロンプトを開き、以下のコマンドでhyper-v […]
 WSL2を試す:Gazeboも動くぞ! (2019-10-23) - WSL (Windows Subsystem for Linux)で授業のROS教材が動かないので、来年には正式にリリースされるLinuxが完全に動くWSL2試してみる。WSLでは動かなった授業のROS教材も問題なく動い […]
WSL2を試す:Gazeboも動くぞ! (2019-10-23) - WSL (Windows Subsystem for Linux)で授業のROS教材が動かないので、来年には正式にリリースされるLinuxが完全に動くWSL2試してみる。WSLでは動かなった授業のROS教材も問題なく動い […] VcXsrvのインストールと設定 (2019-10-23) - X Window システムのインストール。WSLはグラフィカルなインタフェース(GUI)が使えないので、GUIを使いROSを動かすためにはX Windowシステムを別にインストールしなければならない。調べたらVcXsrv […] ROS演習9-2019:ナビゲーションとアクションプログラム (2019-10-15) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年後学期開講の講義ロボットプログラミングⅡ用です。ROS演習で7はrvizを使いGUIでロボットを動かしましたが、今回はROSのActionLibを使ったア […]
VcXsrvのインストールと設定 (2019-10-23) - X Window システムのインストール。WSLはグラフィカルなインタフェース(GUI)が使えないので、GUIを使いROSを動かすためにはX Windowシステムを別にインストールしなければならない。調べたらVcXsrv […] ROS演習9-2019:ナビゲーションとアクションプログラム (2019-10-15) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年後学期開講の講義ロボットプログラミングⅡ用です。ROS演習で7はrvizを使いGUIでロボットを動かしましたが、今回はROSのActionLibを使ったア […] ROS演習5-2019:サービス通信しよう! (2019-10-15) - 今回はROSの通信のもう一つの通信方式であるサービスを理解しましょう。次のROS Wikiを参考にしています。 C++でシンプルなサービスとクライアントを書く シンプルなサービスとクライアントを実行してみる サービスはR […]
ROS演習5-2019:サービス通信しよう! (2019-10-15) - 今回はROSの通信のもう一つの通信方式であるサービスを理解しましょう。次のROS Wikiを参考にしています。 C++でシンプルなサービスとクライアントを書く シンプルなサービスとクライアントを実行してみる サービスはR […] ROS演習4-2019: トピック通信しよう! (2019-10-15) - 今回はROSの通信方式であるトピックを学びます。 1. Publisher キーボードからロボットを操縦するmy_teleopパッケージを作ろう! ROS演習2と同じ要領でmy_teleopパッケージを作ります。忘れた人 […]
ROS演習4-2019: トピック通信しよう! (2019-10-15) - 今回はROSの通信方式であるトピックを学びます。 1. Publisher キーボードからロボットを操縦するmy_teleopパッケージを作ろう! ROS演習2と同じ要領でmy_teleopパッケージを作ります。忘れた人 […]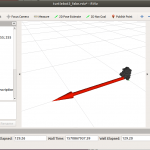 ROS演習3-2019:シミュレータでTurtlebot3を動かそう! (2019-10-12) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です。シミュレータGAZEBOを使い、Turtlebot3を動かします。次のTurtleBot3 e-Manu […]
ROS演習3-2019:シミュレータでTurtlebot3を動かそう! (2019-10-12) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です。シミュレータGAZEBOを使い、Turtlebot3を動かします。次のTurtleBot3 e-Manu […]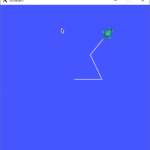 ROS演習1-2019:亀で遊ぼう! (2019-10-12) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講講義ロボットプログラミングⅡ用です。Windows Subsystem for Linux(WSL)にROSをインストールしたので、動作確認を […]
ROS演習1-2019:亀で遊ぼう! (2019-10-12) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講講義ロボットプログラミングⅡ用です。Windows Subsystem for Linux(WSL)にROSをインストールしたので、動作確認を […] ロボットプログラミングⅡ:ROS Melodicのインストール (2019-10-12) - 私が担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です.この記事はROS のオフィシャルウェブサイトの次の日本語記事を簡略化しています。詳しい説明は次のリンクをご覧ください。なお、学内のようなfire […]
ロボットプログラミングⅡ:ROS Melodicのインストール (2019-10-12) - 私が担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です.この記事はROS のオフィシャルウェブサイトの次の日本語記事を簡略化しています。詳しい説明は次のリンクをご覧ください。なお、学内のようなfire […] ロボットプログラミングⅡ-2019:Ubuntu18.04のネットワーク設定 (2019-10-12) - この記事は私が担当している講義ロボットプログラミングⅡ用です。 VirtualBox6.0にインストールしたUbuntu18.04でのネットワーク設定を説明します。 ○ ネットワーク設定 (1) 画面左下のアプリケーショ […]
ロボットプログラミングⅡ-2019:Ubuntu18.04のネットワーク設定 (2019-10-12) - この記事は私が担当している講義ロボットプログラミングⅡ用です。 VirtualBox6.0にインストールしたUbuntu18.04でのネットワーク設定を説明します。 ○ ネットワーク設定 (1) 画面左下のアプリケーショ […] ロボットプログラミングⅡ-2019:Virtualbox6.0の設定 (2019-10-11) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年後学期開講の講義ロボットプログラミングⅡ用です。 この記事では、快適に使うためにVirtualBox6.0の設定を行います。 ○ VirtualBoxの設 […]
ロボットプログラミングⅡ-2019:Virtualbox6.0の設定 (2019-10-11) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年後学期開講の講義ロボットプログラミングⅡ用です。 この記事では、快適に使うためにVirtualBox6.0の設定を行います。 ○ VirtualBoxの設 […] ロボットプログラミングⅡ-2019:Virtualbox6.0+Ubuntu18.04のインストール法 (2019-10-11) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年後学期開講の講義ロボットプログラミングⅡ用です。VMware Workstation Playerは授業で使用するにはライセンス上問題があるので、Virt […]
ロボットプログラミングⅡ-2019:Virtualbox6.0+Ubuntu18.04のインストール法 (2019-10-11) - この記事は私が金沢工業大学ロボティクス学科で担当している2019年後学期開講の講義ロボットプログラミングⅡ用です。VMware Workstation Playerは授業で使用するにはライセンス上問題があるので、Virt […] WSL: Windows for Subsystem for Linux (Ubuntu18.04)のインストールと設定 (2019-10-2) - 仮想マシンを使わなくてWindows上でLinuxが使えるWindows for Subsystem for Linux (以下、WSLと表記)のインストールとメモ。しかもLinuxのバイナリがそのまま動く。Window […] コンピュータ工学Ⅱ:ROS Kineticのインストール (2019-10-2) - 私が担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です.この記事はROS のオフィシャルウェブサイトの次の日本語記事を簡略化しています。詳しい説明は次のリンクをご覧ください。なお、学内のようなfire […]
WSL: Windows for Subsystem for Linux (Ubuntu18.04)のインストールと設定 (2019-10-2) - 仮想マシンを使わなくてWindows上でLinuxが使えるWindows for Subsystem for Linux (以下、WSLと表記)のインストールとメモ。しかもLinuxのバイナリがそのまま動く。Window […] コンピュータ工学Ⅱ:ROS Kineticのインストール (2019-10-2) - 私が担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です.この記事はROS のオフィシャルウェブサイトの次の日本語記事を簡略化しています。詳しい説明は次のリンクをご覧ください。なお、学内のようなfire […] WSL: Windows for Subsystem for Linuxのインストールと設定 (2019-10-2) - 仮想マシンを使わなくてWindows上でLinuxが使えるWindows for Subsystem for Linux (以下、WSLと表記)のインストールとメモ。しかもLinuxのバイナリがそのまま動く。Window […]
WSL: Windows for Subsystem for Linuxのインストールと設定 (2019-10-2) - 仮想マシンを使わなくてWindows上でLinuxが使えるWindows for Subsystem for Linux (以下、WSLと表記)のインストールとメモ。しかもLinuxのバイナリがそのまま動く。Window […]PD実践:授業概要 (2019-9-23) - 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして、組込みプログラミングの基礎を楽しく学びます。 講義日:木曜日3,4限 場 […]
 PD実践:LEGO Mindstorms EV3 開発環境のインストール (2019-9-23) - 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして、組込みプログラミングの基礎を楽しく学びます。なお、ノートパソコンのOSは […]
PD実践:LEGO Mindstorms EV3 開発環境のインストール (2019-9-23) - 本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして、組込みプログラミングの基礎を楽しく学びます。なお、ノートパソコンのOSは […]