
この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です。今回は地図作成にgmappingパッケージと自己位置推定にamclパッケージを使いロボットにナビゲーションをさせましょう! 本記事を以下の記事を参考にしています。
なお、gmappingは占有格子地図をベースとしたFastSLAMのパッケージで、amclはモンテカルロ位置同定の一種であるAdaptive Monte Carlo Localizationのパッケージとなっています。
1. 地図生成
(1) 端末を3つ開き以下のコマンドを実行する。
gazeboシミュレータを起動。ROS演習7-2019の演習準備を実行し、事前に建物の3Dファイルfmt_world.tarをダウンロードして指定場所に保存する必要あり。
$ export TURTLEBOT3_MODEL=burger$ roslaunch turtlebot3_gazebo turtlebot3_fmt_world.launch
地図生成のgmappingを起動
$ export TURTLEBOT3_MODEL=burger$ roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping- 注1:rvizがOpenGL関係のエラーで落ちる場合は、以下の1行を.bashrcの最後に付け加える
- export LIBGL_ALWAYS_SOFTWARE=1
- 注2:エラーがでる場合はgmappingのパッケージが入っていない可能性がありますので、以下のコマンドでインストールしてください。
- sudo apt install ros-melodic-gmapping
(2) 端末を開き、以下のコマンドでロボットを動かし、地図を作る。
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
(3) 端末を開き、以下のコマンドで地図を保存する。mymapは保存する地図名なので適宜変更する。
$ mkdir ~/maps$ rosrun map_server map_saver -f ~/maps/mymap
2. ナビゲーション
一度開いている端末を全部閉じ、ノードを落とす。
(1) gazeboシミュレータを起動
$ export TURTLEBOT3_MODEL=burger$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
(2) 自己位置推定ノードの起動
上で作成した地図を使ってナビゲーションをする。
$ export TURTLEBOT3_MODEL=burger$ roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/maps/mymap.yaml
(3) (2)のコマンドで rvizも起動するが、rvizを別に起動したい場合は以下のコマンドを使う。
$ rviz -d `rospack find turtlebot3_slam`/rviz/turtlebot3_navigation.rviz
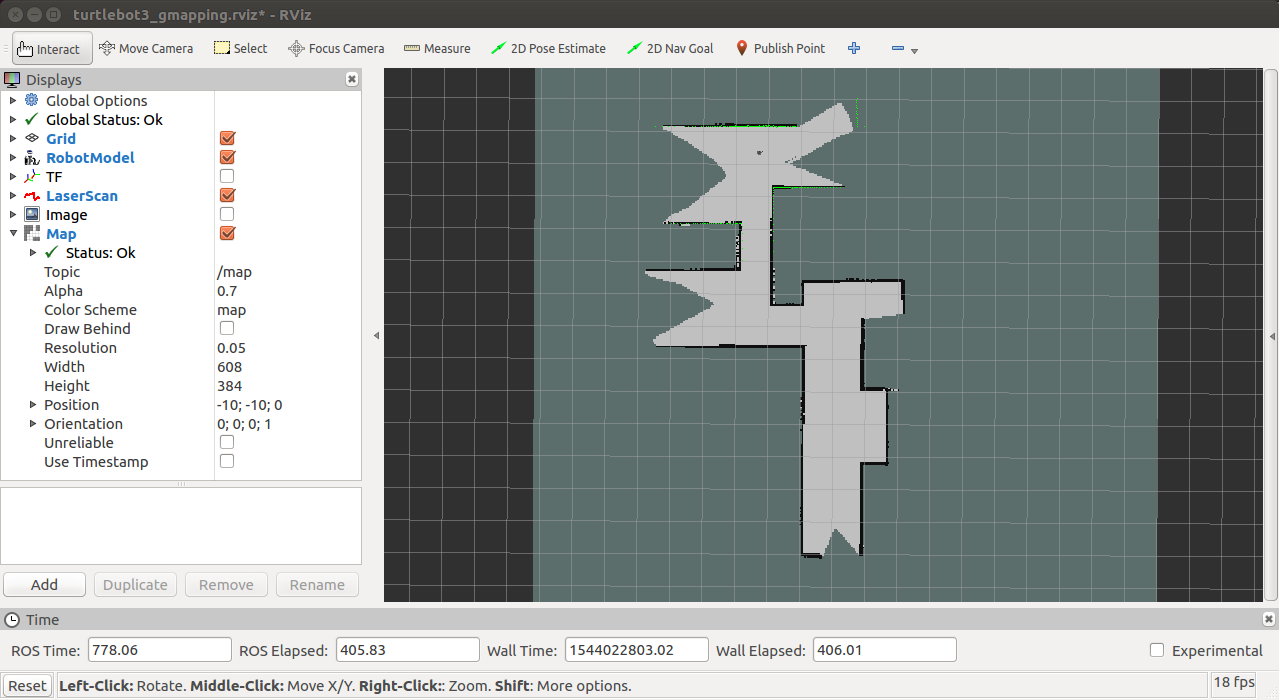
(4) ロボット初期位置の設定
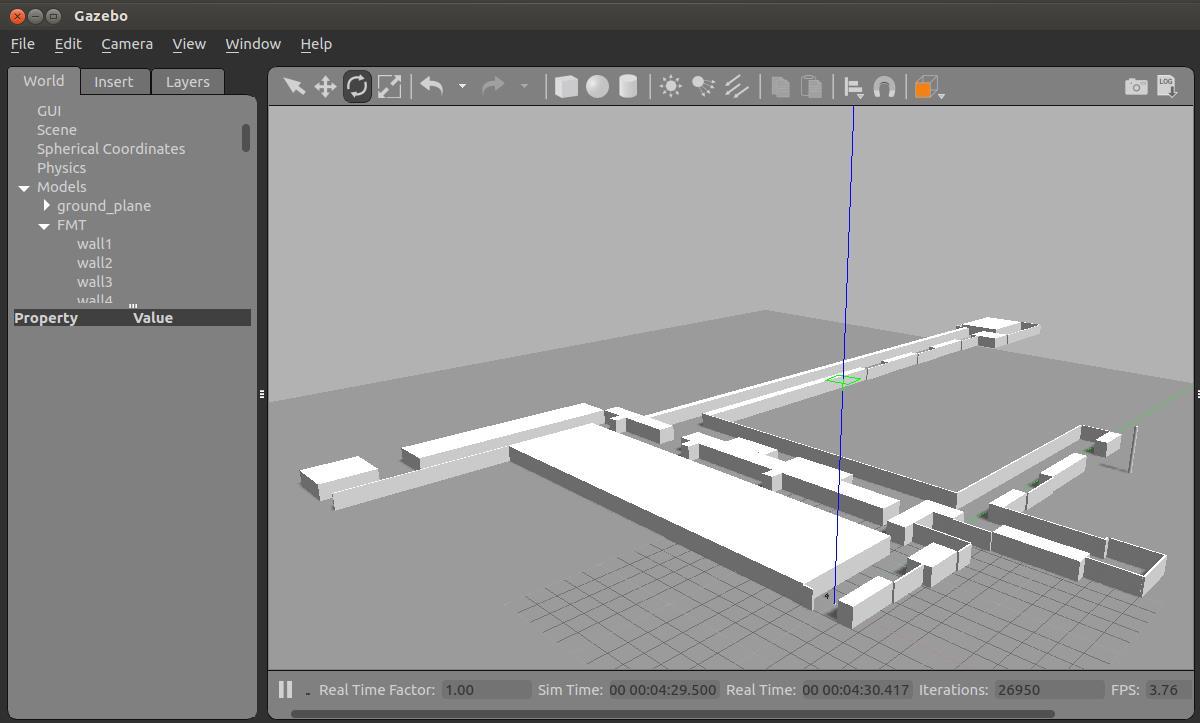
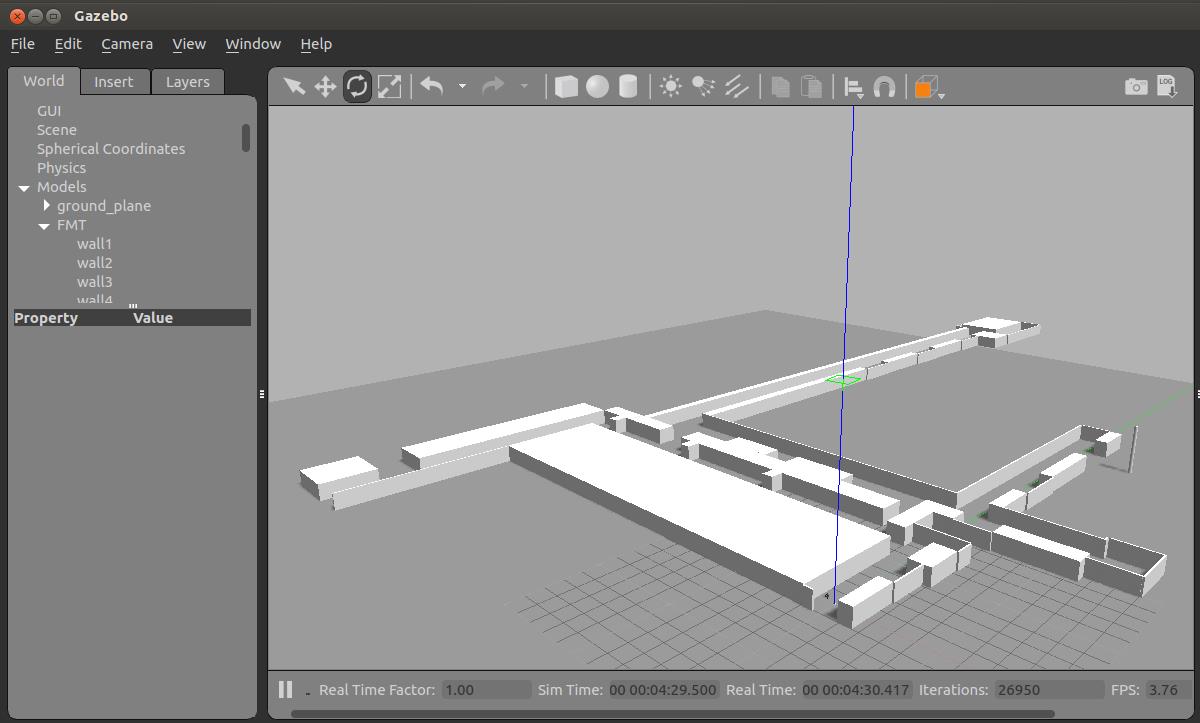
上で起動したrviz(上図)の”2D Pose Estimation”をクリックして選択し、下図シミュレータのロボットの向きと位置が合うように、rviz上でロボットの位置と向きを設定する。ロボットの位置にマウスのカーソールを持って行き、ロボットの向きにドラッグすると設定終わり。
(5) ゴールの設定
次にrvizの”2D Nav Goal”をクリックして、初期位置を設定したのと同様に、ゴールの位置と向きを設定する。設定するとロボットが自動で動き出す。
3.演習
- 上の説明に従って建物の地図を作り、スタート地点からゴールまでロボットをナビゲーションさせてみよう。スタート地点は上図で上空に伸びている青い線、初期位置(0, 0)、ゴールは上図の右上にあるポールです。なお、地図上の格子は一辺が1[m]です。どうなるかな?
終わり

コメント