この記事は私が金沢工業大学ロボティクス学科で担当している2019年度後学期開講の講義ロボットプログラミングⅡ用です。シミュレータGAZEBOを使い、Turtlebot3を動かします。次のTurtleBot3 e-Manualを参考にしています。
1. 設定
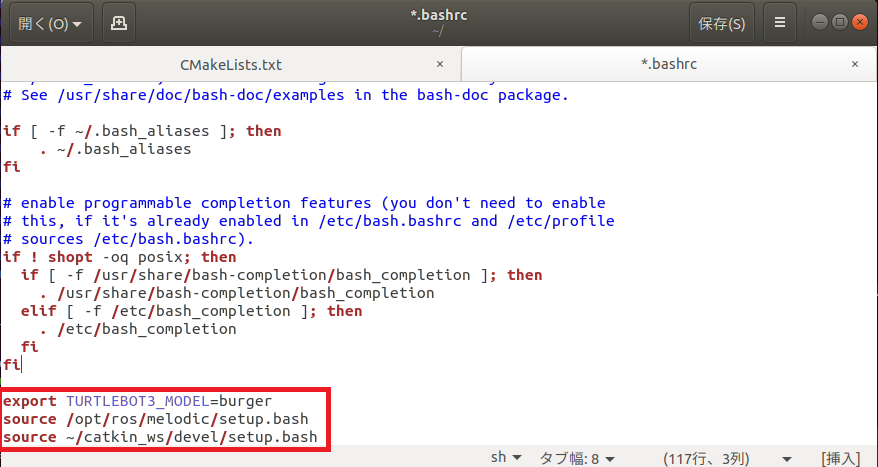
~/.bashrcの最後の3行をgeditを使って以下のように設定し保存する。
2. Turtlebot3 リモートPC用のパッケージインストール
まず、Turtlebot用のパッケージをインストール。端末を開き、次のコマンドを実行。2番目は長いのでコピペする。$はコマンドプロンプトなので入力しない。
- $
sudo apt update - $
sudo apt upgrade - $
sudo apt-get install ros-melodic-joy ros-melodic-teleop-twist-joy ros-melodic-teleop-twist-keyboard ros-melodic-laser-proc ros-melodic-rgbd-launch ros-melodic-depthimage-to-laserscan ros-melodic-rosserial-arduino ros-melodic-rosserial-python ros-melodic-rosserial-server ros-melodic-rosserial-client ros-melodic-rosserial-msgs ros-melodic-amcl ros-melodic-map-server ros-melodic-move-base ros-melodic-urdf ros-melodic-xacro ros-melodic-compressed-image-transport ros-melodic-rqt-image-view ros-melodic-navigation
- $
cd ~/catkin_ws/src/ - $
git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git - $
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git - $
git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git - $
git clone https://github.com/ROBOTIS-GIT/turtlebot3_gazebo_plugin.git - $
cd ~/catkin_ws - $
catkin build
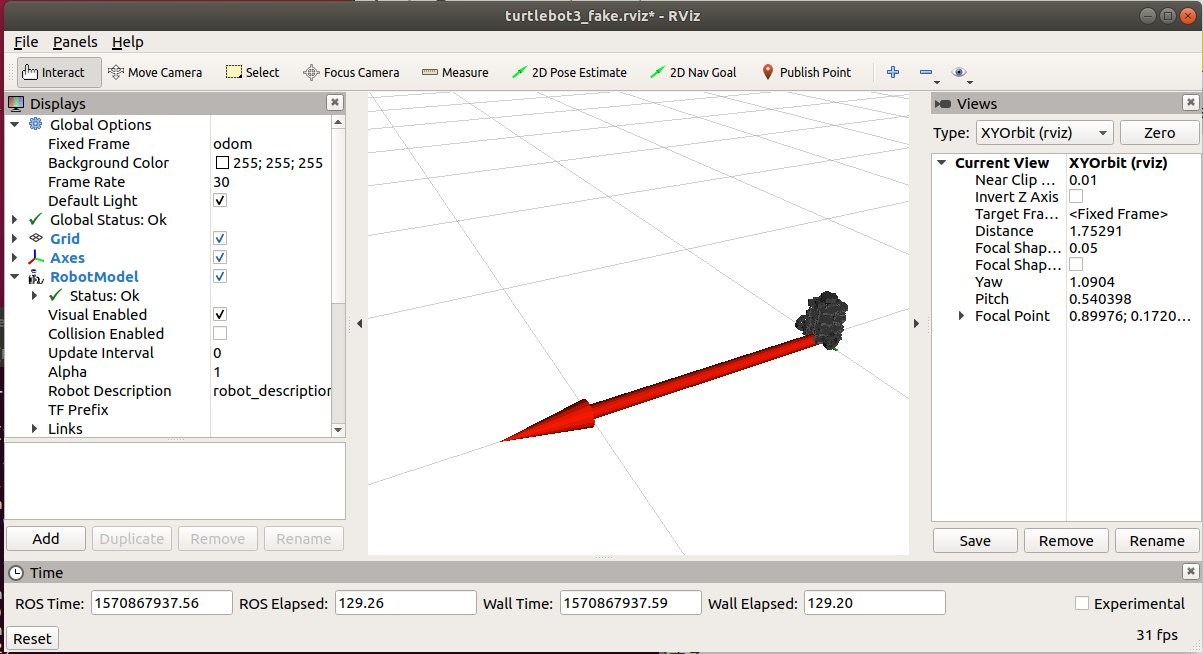
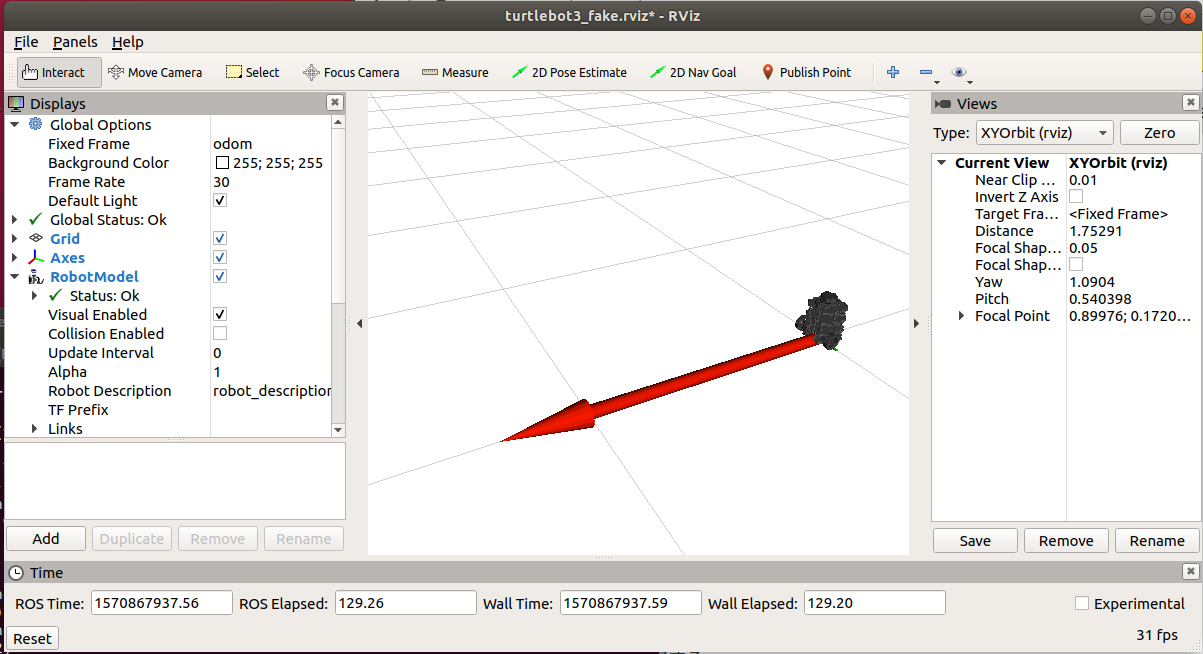
3. rvizの起動
端末を開き次のコマンドを実行すると、ROSの視覚化ツールrvizが起動する。
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_fake turtlebot3_fake.launch
別の端末を開き、次のコマンドを実行
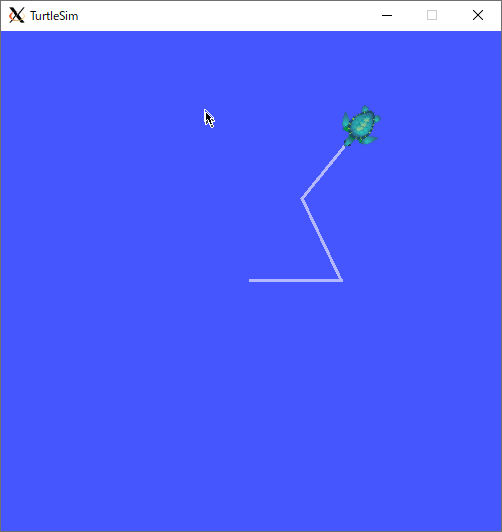
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
演習1で実施したようにキーボードでturtlebot3を動かせます。動かしてみましょう!
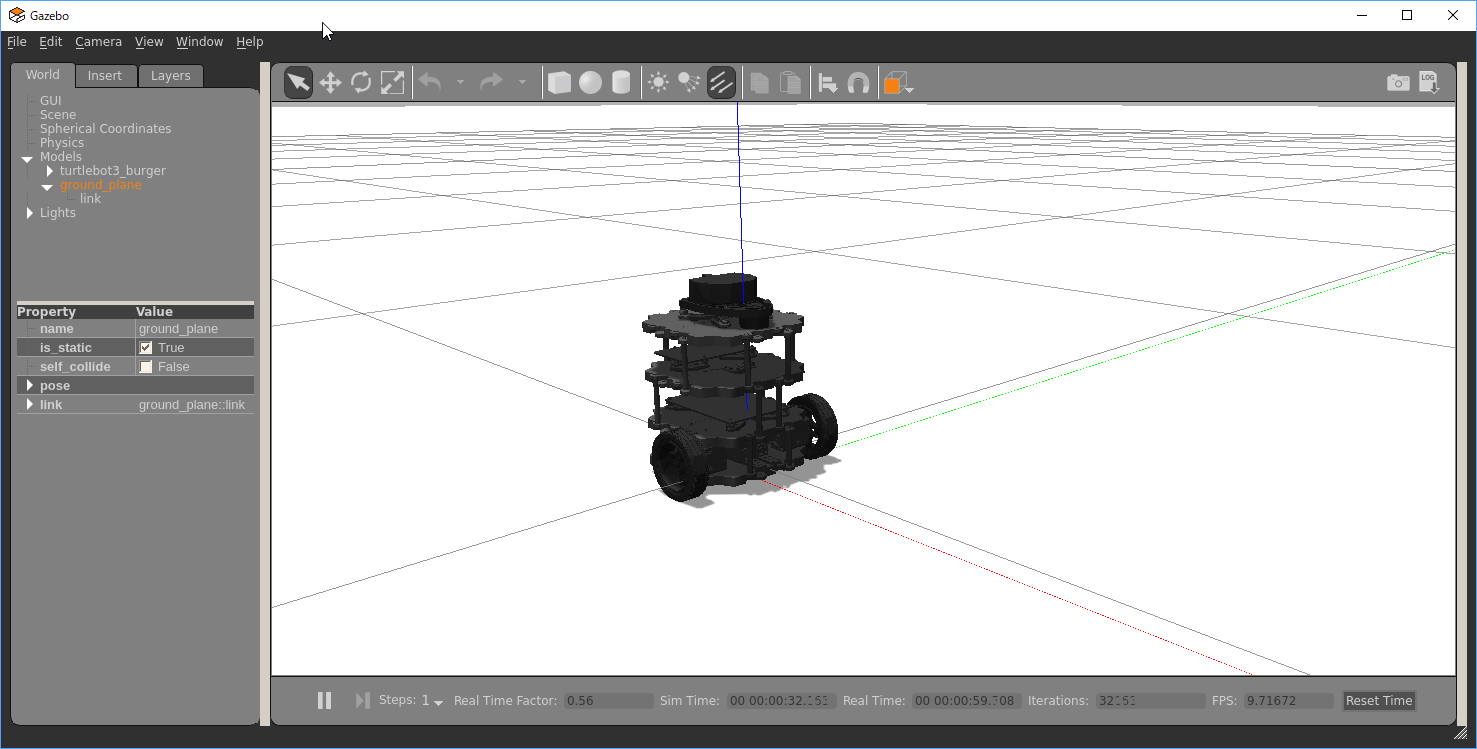
4. Simulator GAZEBOを動かそう
次のコマンドでROSのシミュレータGazeboを起動する。
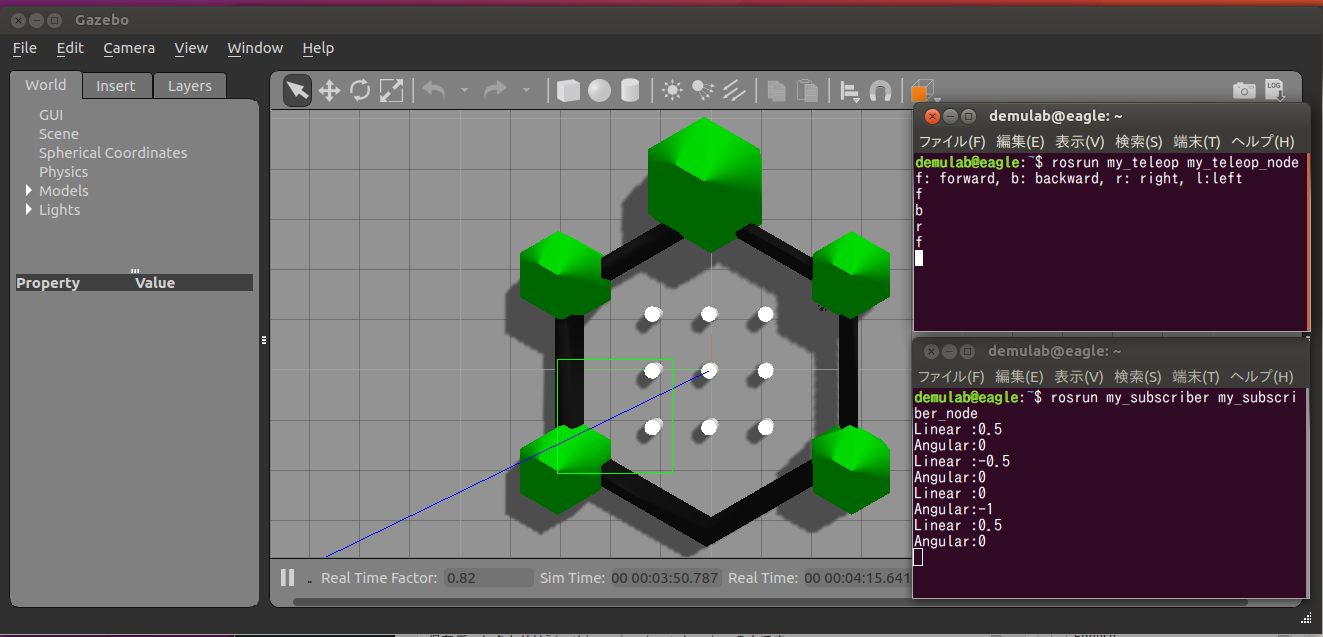
$ roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch
初回はネットからモデルを取得するので、私の環境で5分程度かかった。しばらくすると次のようなウインドウが開く。下のロボットがturtlebot3。
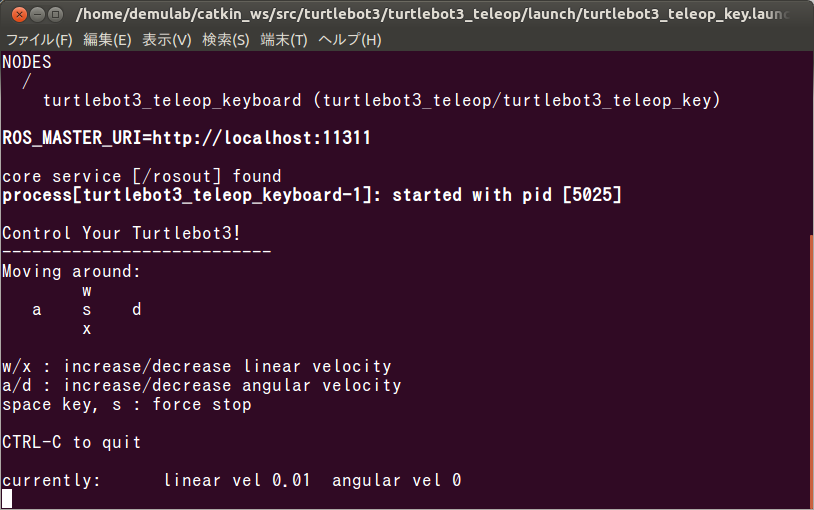
別の端末を開き、次のコマンドを入力するとキーボードからロボットを操縦するためのlaunchファイルを起動。
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
端末に下のように表示される。w a s d x キーでロボットを操作できる。いずれかのキーを押してロボットを動かそう!マウスのカーソルがturtlebot3_teleop_key.launchを起動した端末上になければ動かないので注意。
お疲れ様!
コメント