 lecture
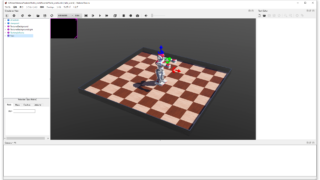
lecture Webots講座2-2023:プログラミングしよう!(Python)
Webots講座の2回目です.さっそく,Pythonを使ってロボットを動かしてみましょう.レファレンス Webots User Guide (Cyberbotics, Inc.)環 境 Windows...
lecture  lecture
lecture  lecture
lecture  education education
education education  AIロボット入門
AIロボット入門  education
education  education
education  education
education  education
education  AIロボット入門
AIロボット入門  AIロボット入門
AIロボット入門  education education
education education 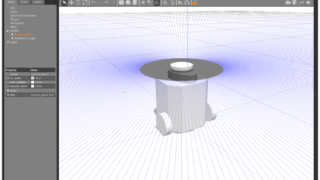 education
education  education
education 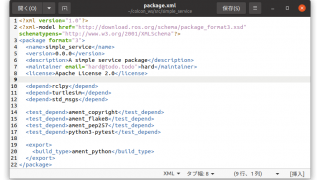 education education
education education 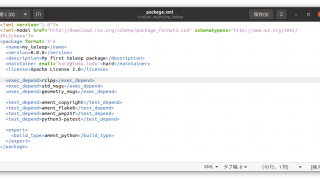 AIロボット入門
AIロボット入門 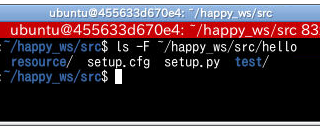 education AIロボット入門
education AIロボット入門  AIロボット入門
AIロボット入門  education education
education education  lecture
lecture  lecture
lecture  lecture
lecture  lecture education
lecture education 



 Users Today : 39
Users Today : 39 Users Last 30 days : 971
Users Last 30 days : 971 Users This Year : 971
Users This Year : 971 Total Users : 8722622
Total Users : 8722622 Views Today : 59
Views Today : 59 Who's Online : 0
Who's Online : 0