 lecture
lecture Webots講座7-2024:LIDARを使った簡単な障害物回避 (Python)
Webots講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障...
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 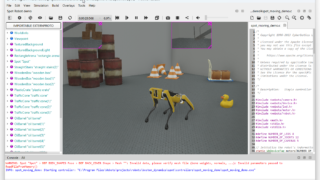 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 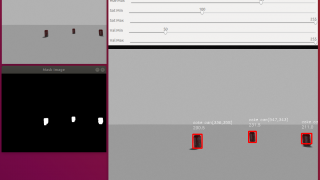 lecture
lecture  lecture lecture
lecture lecture  lecture
lecture  lecture
lecture  education education education
education education education  education
education  education
education  education
education 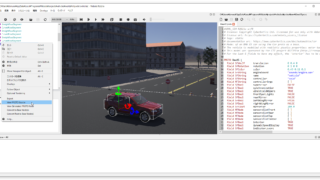 lecture
lecture 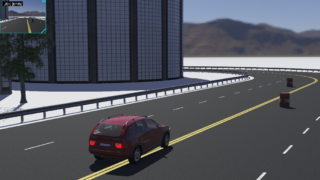 lecture lecture lecture lecture lecture lecture
lecture lecture lecture lecture lecture lecture 




 Users Today : 35
Users Today : 35 Users Last 30 days : 967
Users Last 30 days : 967 Users This Year : 967
Users This Year : 967 Total Users : 8722618
Total Users : 8722618 Views Today : 55
Views Today : 55 Who's Online : 1
Who's Online : 1