 lecture
lecture ROS演習5:地図作製・自己位置推定(SLAM, AMCL)
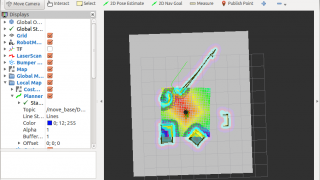
この記事は私が担当している講義ロボットプログラミングⅡ用です。今回は地図作成(SLAM)と自己位置推定(AMCL)のパッケージを使いロボットにナビゲーションをさせましょう! 本記事を以下のチュートリア...
lecture 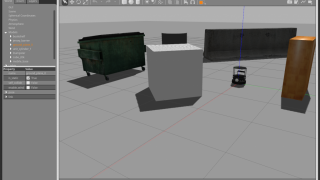 lecture
lecture 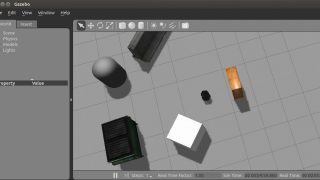 lecture
lecture  lecture
lecture 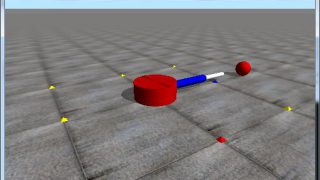 lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 



 Users Today : 43
Users Today : 43 Users Last 30 days : 975
Users Last 30 days : 975 Users This Year : 975
Users This Year : 975 Total Users : 8722626
Total Users : 8722626 Views Today : 63
Views Today : 63 Who's Online : 0
Who's Online : 0