
この記事は生活支援ロボット:ROS×Python勉強会用の資料です。Turtlebot2/KOBUKIを動かします。次のROS Wikiを参考にしています。
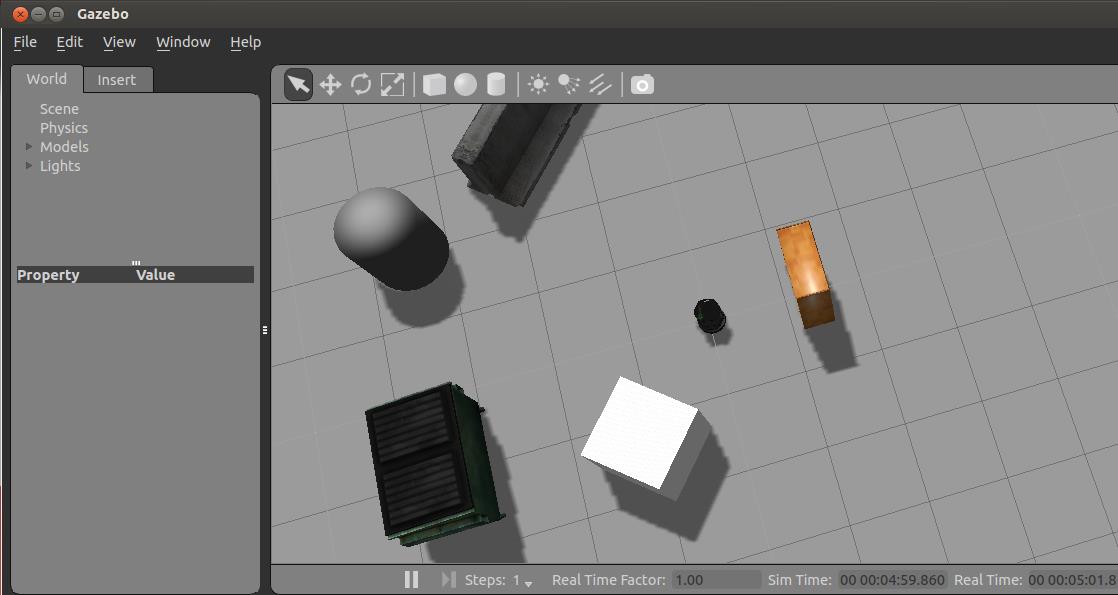
この記事は私が担当している講義ロボットプログラミングⅡ用です。シミュレータGAZEBOを使い、Turtlebotを動かします。次のROS Wikiを参考にしています。
1. Turtlebot用のパッケージインストール
まず、Turtlebot用のパッケージをインストール。端末を開き、次のコマンドを実行。
$ sudo apt-get update
$ sudo apt-get install ros-indigo-turtlebot ros-indigo-turtlebot-apps ros-indigo-turtlebot-interactions ros-indigo-turtlebot-simulator ros-indigo-kobuki-ftdi ros-indigo-rocon-remocon ros-indigo-rocon-qt-library ros-indigo-ar-track-alvar-msgs
$ . /opt/ros/indigo/setup.bash
$ rosrun kobuki_ftdi create_udev_rules
2. VirtualBoxの設定
VirtualBox以外の人は次に進む。なお、VirtualBoxのUbuntuからTurtlebotを動かす場合はノートパソコンにUSB2.0のポートが必要です。USB3.0しかない場合はデュアルブートでLinuxを起動できるようにする必要があります。未確認ですがVMwareなら可能かもしれません。VMwareお持ちの方は試してください。
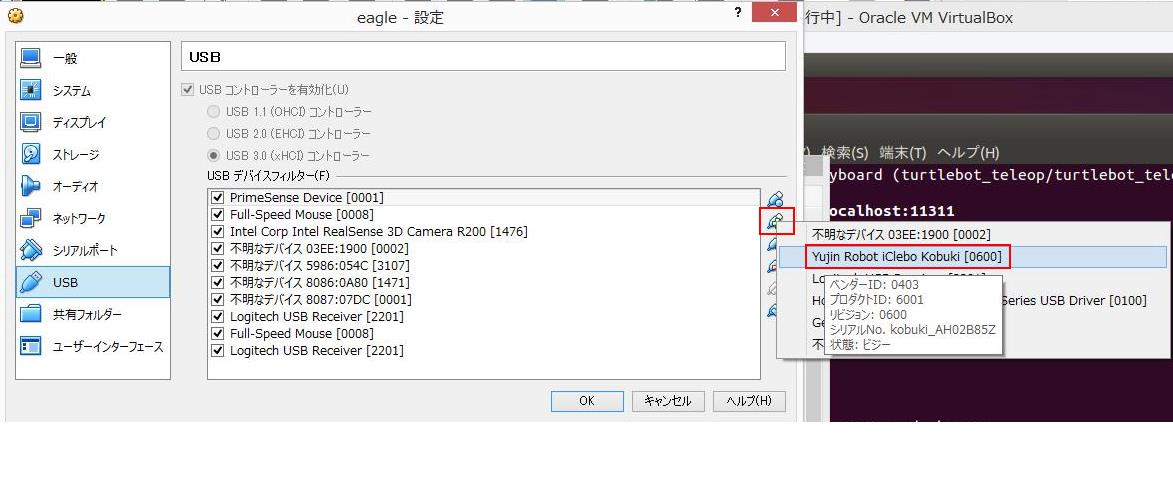
Virtualboxを起動する。設定→USBをクリック。USBデバイスフィルター右の赤枠で囲んだ「コネクタに+のついたアイコン」をクリック。Yujin robot iCleboKobukiを選択し、「OK」をクリック。
3. ロボットをキーボードから動かそう
これからキーボードでシミュレータ上のロボットを操縦します。まず、デバイスファイルができているか確認する。
次のコマンドで/devにあるデバイスファイルを表示する。ttyUSB0(ゼロ)があればOK
$ ls /dev/tty*
/dev/ttyUSB0はス―バーユーザの権限がないと使えないので、ユーザが使えるように次のコマンドでファイルのアクセス権を変更する。
$ sudo chmod u+x /dev/ttyUSB0
では、ロボットを動かすための最小限(minimal)ノードを起動しよう!
$ roslaunch turtlebot_bringup minimal.launch
別の端末を開き、次のコマンドでキーボードからロボットを操縦するノードを起動。
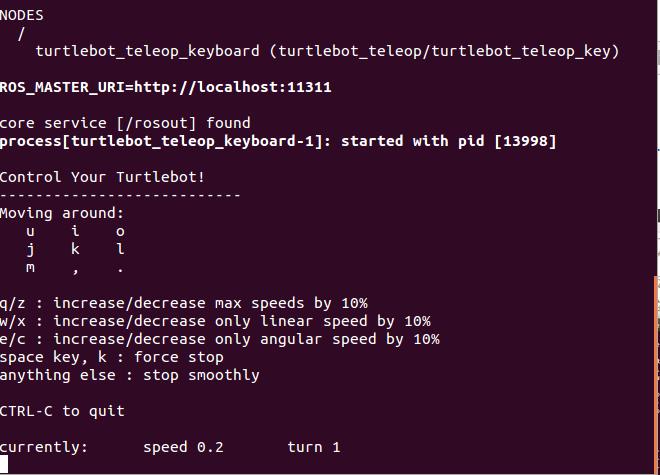
$ roslaunch turtlebot_teleop keyboard_teleop.launch
端末に下のように表示される。u i o j k l m , .キーでロボットを操作できる。いずれかのキーを押してロボットを動かそう!
終わり

コメント