この記事は私が担当している講義ロボットプログラミングⅡ用です。今回は第6週のプログラムを少し改良してウェイポイントナビゲーションのプログラムを作りましょう。これを応用するだけで、つくばチャレンジに出場できますよ。
ソース
// 本プログラムは
// http://wiki.ros.org/ja/navigation/Tutorials/SendingSimpleGoals
// を元に作成しています。
#include <ros/ros.h>
#include <move_base_msgs/MoveBaseAction.h>
#include <actionlib/client/simple_action_client.h>
#include <tf/transform_broadcaster.h>
typedef actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> MoveBaseClient;
struct MyPose {
double x;
double y;
double yaw;
};
int main(int argc, char** argv){
MyPose way_point[] = {
{-2.0, 3.0,-0.5 * M_PI},
{ 3.0, 3.0, 0.0 * M_PI},
{ 3.0,-4.5, 0.5 * M_PI},
{ 0.0,-4.5, 1.0 * M_PI},
{ 0.0, 0.0, 0.0 * M_PI},
{999, 999, 999}};
ros::init(argc, argv, "wp_navigation");
// アクションクライアンを作成。1番目の引数は接続するアクションサーバー名。
// 2番目の引数はtrueならスレッドを自動的に回す(ros::spin()。
MoveBaseClient ac("move_base", true);
// アクションサーバーが起動するまで待つ。引数はタイムアウトする時間(秒)。
// この例では5秒間待つ(ブロックされる)
while(!ac.waitForServer(ros::Duration(5.0))){
ROS_INFO("Waiting for the move_base action server to come up");
}
ROS_INFO("The server comes up");
move_base_msgs::MoveBaseGoal goal;
// map(地図)座標系(第6週のプログラムとの大きな変更点)
goal.target_pose.header.frame_id = "map";
// 現在時刻
goal.target_pose.header.stamp = ros::Time::now();
int i = 0;
while (ros::ok()) {
// ROSではロボットの進行方向がx座標、左方向がy座標、上方向がz座標
goal.target_pose.pose.position.x = way_point[i].x;
goal.target_pose.pose.position.y = way_point[i].y;
if (goal.target_pose.pose.position.x == 999) break;
goal.target_pose.pose.orientation
= tf::createQuaternionMsgFromYaw(way_point[i].yaw);
ROS_INFO("Sending goal: No.%d", i+1);
// サーバーにgoalを送信
ac.sendGoal(goal);
// 結果が返ってくるまで60.0[s] 待つ。ここでブロックされる。
bool succeeded = ac.waitForResult(ros::Duration(60.0));
// 結果を見て、成功ならSucceeded、失敗ならFailedと表示
actionlib::SimpleClientGoalState state = ac.getState();
if(succeeded) {
ROS_INFO("Succeeded: No.%d (%s)",i+1, state.toString().c_str());
}
else {
ROS_INFO("Failed: No.%d (%s)",i+1, state.toString().c_str());
}
i++;
}
return 0;
}
- packageのディレクトリ毎、圧縮したファイル
- 展開・ビルド方法
- $ cp wp_navigation.tgz ~/catkin_ws/src/.
- $ cd ~/catkin_ws/src
- $ tar xvzf wp_navigation.tgz
- $ cd ~/catkin_ws
- $ catkin_make
演習
- 上で展開したwp_navigationを次の要領で実行しよう。
- $ roslaunch turtlebot_gazebo turtlebot_world.launch
- $ roslaunch turtlebot_gazebo amcl_demo.launch map_file:=/opt/ros/indigo/share/turtlebot_gazebo/maps/playground.yaml
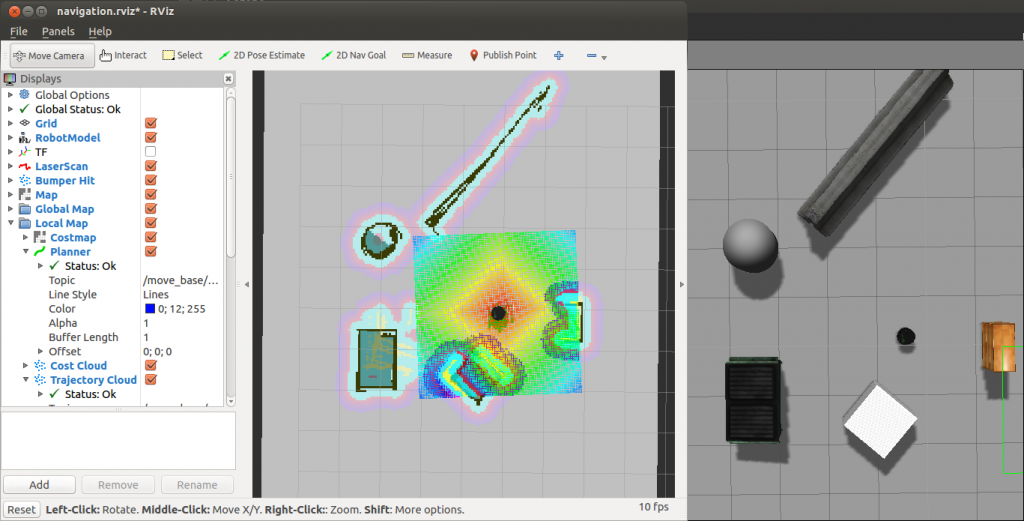
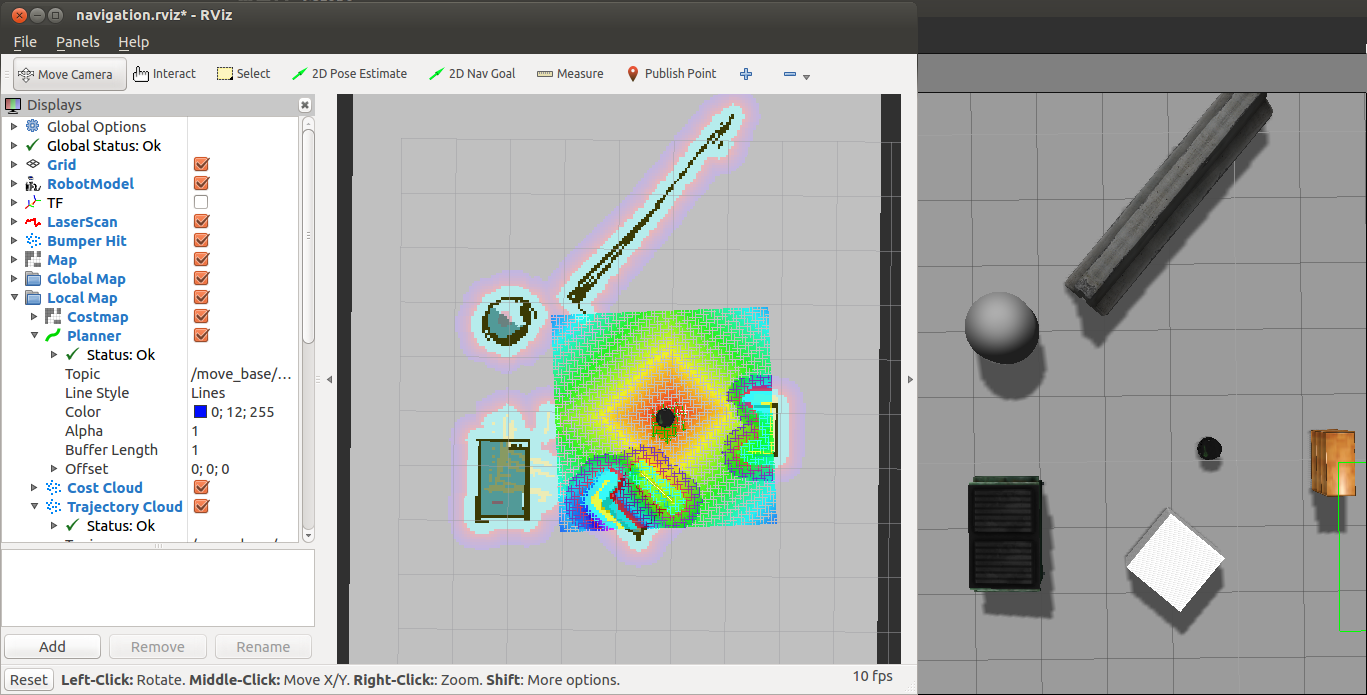
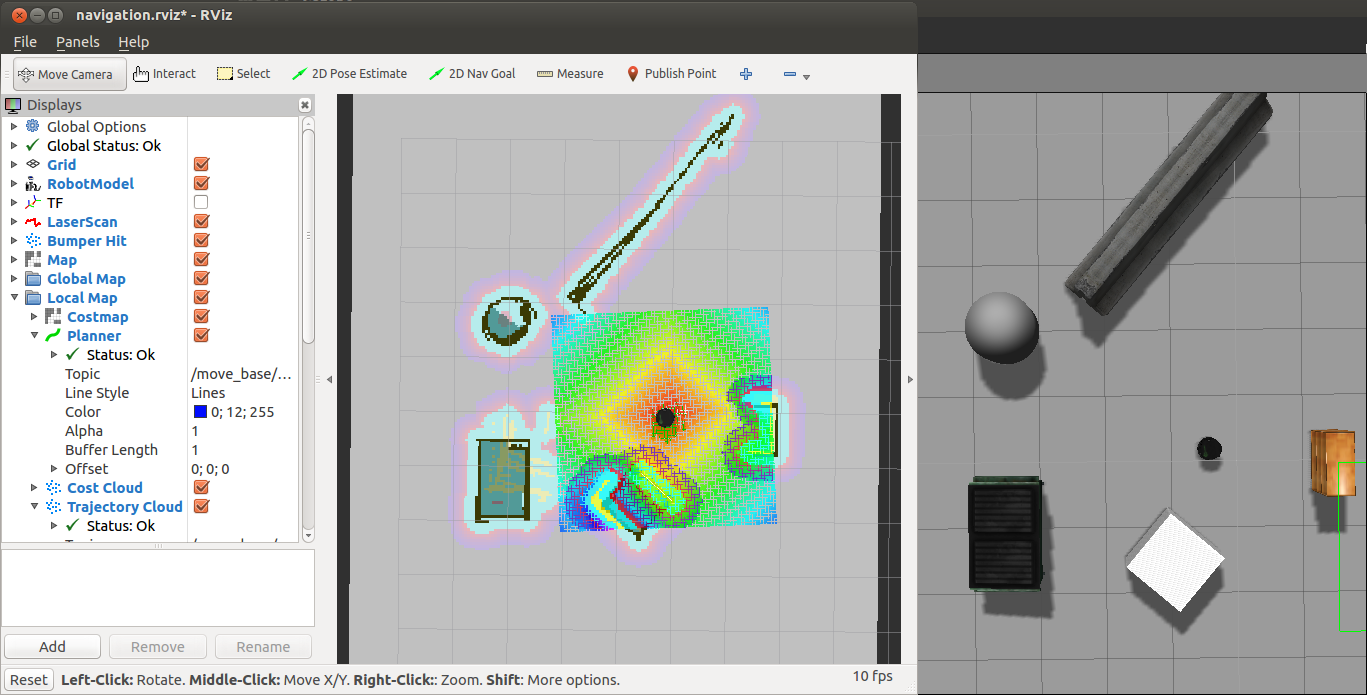
- $ roslaunch turtlebot_rviz_launchers view_navigation.launch
- $ rosrun wp_navigation wp_navigation
プチプロジェクト
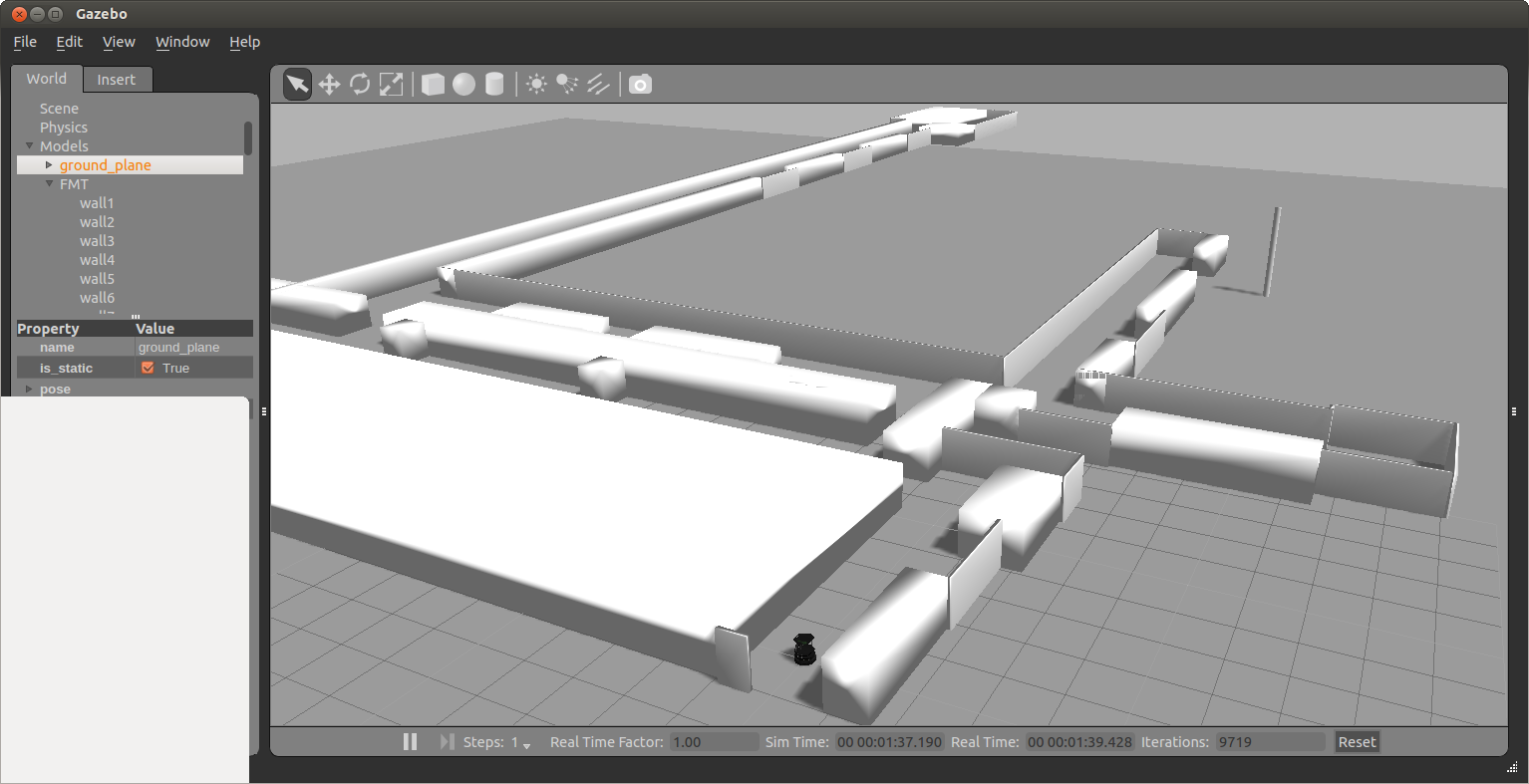
- もう少し規模の大きい建物内でのナビゲーションを考えましょう。以下のワールドファイルを使い、ロボットの初位置から右奥にあるポールまでウェイポイントナビゲーションをするプログラムをつくりましょう。
- 準備
- empty_worldを読み込んでからでないとエラーが出ると報告があったので、以下のコマンドをまず実行する。
- $ roslaunch gazebo_ros empty_world.launch
- $ cd
- $ mkdir downloads
- fmt_world.tgzをダウンロードして~/downloadsの中に保存。
- $ cd downloads
- $ tar xvzf fmt_world.tgz
- $ cd fmt_world
- $ sudo cp fmt_world.launch /opt/ros/indigo/share/turtlebot_gazebo/launch
- $ sudo cp fmt.world /usr/share/gazebo-2.2/worlds
- $ cp -r fmt ~/.gazebo/models
- $ roslaunch turtlebot_gazebo fmt_world.launch
- empty_worldを読み込んでからでないとエラーが出ると報告があったので、以下のコマンドをまず実行する。
- 下のような建物とロボットが表示されたら終わり。右奥のボールがゴール。

コメント