 lecture
lecture ロボットプログラミングⅡ-2021:ROS2演習4-トピック通信しよう!(Python)
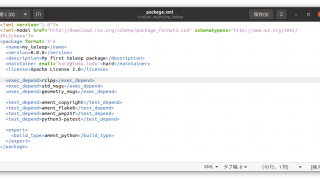
この記事は金沢工業大学 ロボティクス学科で2021年後学期開講中のロボットプログラミングⅡ用です.今回は、ROS2の通信方式であるトピックとそれをPythonで実現する方法を学びましょう!詳細なコンテ...
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture lecture
lecture lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture 