 education
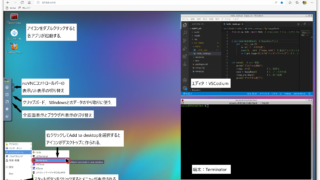
education AIロボット入門2023:LXDEデスクトップ環境の使い方
拙著「ROS2とPythonで作って学ぶAIロボット入門」(講談社)を授業で使用する場合の講義資料のたたき台です.今回は,この本のDockerイメージが使っているUbuntuの軽量デスクトップLXDE...
education  education
education  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  lecture
lecture  education education
education education  AIロボット入門
AIロボット入門  education
education  education
education  education
education  education
education  AIロボット入門
AIロボット入門  AIロボット入門
AIロボット入門  education education
education education  education
education  education
education  education education
education education  AIロボット入門
AIロボット入門  education
education