 robocup@home
robocup@home カチャカでロボカップ9:ゲームコントローラで動かそう♪
はじめに 今回は小ネタです。ROS2のteleop_twist_joyパッケージを使いPS4 DUALSHOCKなどのゲームコントローラでカチヤカを遠隔操縦する方法を説明します。 teleop_twi...
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup
robocup  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  deeplearning
deeplearning  robocup@home
robocup@home  robocup@home
robocup@home 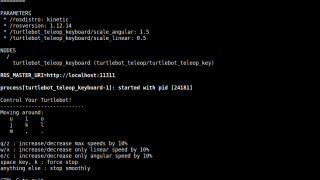 robocup@home
robocup@home  robocup@home robocup@home
robocup@home robocup@home  robocup@home
robocup@home  robocup@home
robocup@home  deeplearning
deeplearning 