 robot
robot Open3D: インストールメモ
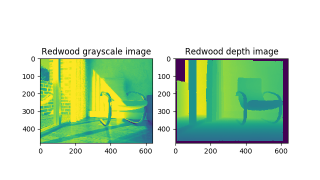
3次元データ処理のオープンソースライブラリOpen3Dのインストールメモ。3次元データ処理ライブラリとしてはPCLが有名だが、Open3Dの方が簡単でコードも短くて済む。言語はpythonとC++をサ...
robot  robot
robot  robot
robot  robot
robot  robot
robot  robot
robot  misc
misc  misc
misc  roundup
roundup  roundup
roundup  robot
robot  deeplearning
deeplearning  deeplearning
deeplearning  misc
misc  misc
misc  deeplearning
deeplearning  education
education  deeplearning
deeplearning  deeplearning
deeplearning  deeplearning
deeplearning  deeplearning
deeplearning  deeplearning
deeplearning  deeplearning
deeplearning  deeplearning
deeplearning  deeplearning
deeplearning  deeplearning
deeplearning  deeplearning
deeplearning  misc
misc  deeplearning
deeplearning  lecture
lecture